
基于三维激光扫描技术的水工隧洞变形量高精度计算方法研究
2019-08-28 03:20范泯进朱燕梅
水利规划与设计 2019年8期
范泯进,罗 浩,朱燕梅,沙 椿
(1.四川中水成勘院工程物探检测有限公司,四川 成都 610072;2.雅砻江流域水电开发有限公司,四川 成都 610051)
水力发电站引水隧洞一般埋深较大,在运行过程中受岩体应力、地下水压力以及运行期内水压力等直接作用,隧洞结构可能产生轴向或切向等形变,超过一定程度的形变会危害隧洞安全,影响整个引水发电系统正常运行,因此引水隧洞结构变形监测是水电站安全监测工作中的重要环节。传统的隧洞变形监测是沿隧洞轴向以一定间距在洞壁上布设监测断面,利用全站仪、水平仪和收敛仪等进行监测,这些方法获取数据较为直接、可靠,但耗费大量的人力、物力,并且由于监测断面一般布设间距较大,仅能准确反映断面附近的洞壁形变,使得监控数据不连续、不全面,不能详细、整体掌握隧洞结构变化,使水电站的整体平稳运行存在安全隐患。所以,高精度三维激光扫描技术逐渐运用到隧道安全监测中。该监测技术能可在有效测程范围内提供高精度、高密度点云数据,构建三维模型数据场,能够全面准确的反映监测对象的形变、裂缝发育、表面破损等细节信息,可以有效避免传统变形监测手段的局部性和片面性。三维激光扫描技术应用在隧洞变形监测时,主要通过高精度、高密度点云数据与设计模型或多期测量点云数据进行拟合比对,从而计算得出变形结果。目前高精度三维激光扫描仪已能达到小于1mm的测距精度,而点云数据的配准和变形量计算方法成为影响三维激光隧洞变形监测精度的主要因素。
1 点云的配准
点云数据的配准是指在隧道扫描监测时,由于洞壁表面的细节信息以及完整的三维空间形态数据需要经过多次扫描获得,并且对于具有一定长度的隧洞,为保证测试精度一般采用多站点连续覆盖扫描,将这些分块扫描点云数据进行整合并统一到同一空间坐标系统中的过程。三维激光扫描点云配准工作是后续数据处理、建模分析的基础。
三维激光扫描仪在隧洞中针对同一部位的两次覆盖扫描点云数据集分别设为M和N,mi和ni则为M、N内相同测试目标的对应点对,即为mi(x,y,z)∈M,ni(x,y,z)∈N。将上述两个点云数据集合中的所有点对(mi,ni)通过一定的平移和正交矩阵进行刚体变换,即:
(1)
而在上述方程的求解过程中,由于数据集M、N中不可避免会存在噪声,在数据点的对应匹配中会存在误差,而配准的目标是使误差e最小:
e=∑[Rmi+T-ni]2
(2)
在三维激光扫描数据点云配准中,常用基于特征点配准和基于靶标的配准。基于特征点配准是指在多次覆盖测量的点云数据中,手动拾取相同目标体两个以上的对应点对,通过对这些点进行检索匹配,实现点云数据的配准;而基于靶标的配准是指在测量过程中预先设置两个或两个以上固定的靶标,点云数据匹配时将同一靶标作为对应点云集,并以此为基准进行点云配准。对于高精度测量,一般采用专用高精度靶球进行配准。
(1)基于特征点的配准
以特征点作为基准进行点云匹配,需要在存在相同覆盖扫描目标中拾取多个对应点,这些点应尽量处于不同的空间位置,特征点拾取完成后依据变换公式进行精细配准。一般而言,对应特征点数越多,对应点越准确,配准精度越高。
(2)基于靶标的配准
在实际的三维激光扫描测试中一般采用专用高精度靶球,扫描点云中靶球360。呈现固定尺寸形态,可以作为不同测站之间匹配标志,也可以设置在变形部位作为参照。在点云数据配准时,以两个或以上的对应靶球作为相邻测站的匹配基准,将会获得较高的配准精度。一般而言基于靶球的配准精度高于手动拾取特征点配准精度。
2 隧洞变形计算方法研究
在隧洞进行三维激光扫描获取点云数据并初步配准处理完成后的变形量计算、变形分析提取工作是隧洞变形监测的主要内容。高精度三维激光扫描的点云数据量大,其单站扫描点数已达上亿,反映测试目标表面信息详细而准确。将隧洞扫描数据场与设计模型或多期测试数据通过比对算法进行计算分析,可反映洞壁位移变形、隆起塌陷、裂缝渗漏、冲蚀磨损和表层剥落等情况。而变形量的计算和分析方法,直接影响隧洞变形监测的精度。隧洞变形分析一般通过提取隧道横断面点云进行变形量计算,该方法简单直接,在洞壁表面平整或干扰噪点较小时可获得较好的计算精度;而当测试表面情况复杂,特别是积水或渗流面反射产生大量噪点时,其计算精度将会受到成倍影响;此外由于引水隧洞一般较长,对于不同期测试结果会存在一定的系统误差,该系统误差如果得不到消除会放大整体形变或掩盖细小变形。本文结合引水隧洞实际情况,研究实现隧洞高精度变形分析的方法。
由于引水隧洞直径一般为3~12m,其表面多数为简单曲面或平面,几何形状较为规则。通过对隧洞特征分析,将其按几何结构进行简单分割后运用最小二乘法拟合隧洞轴线,并沿轴线将隧洞进行微断面划分,再沿洞周方向将每个断面按角度细分为3600单元,如图1所示。通过统计沿洞轴向角度微元点云分布密度,并依据径向位移偏差和轴向密度阀值进行去噪,而后运用ICP算法将断面点云数据拟合设计模型或多期测试点云,通过计算微元拟合残差来分析洞壁表面的整体相对变形。
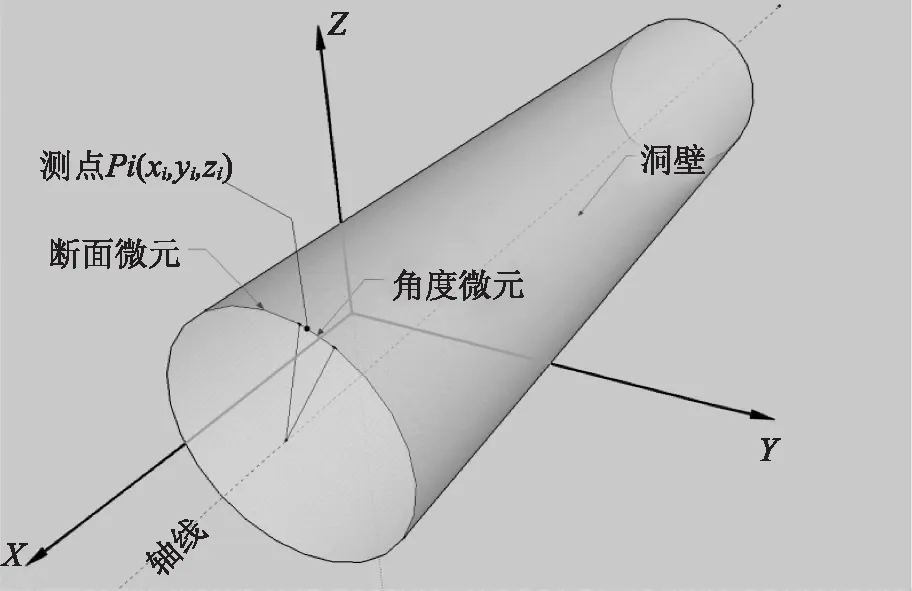
图1 隧洞变形分析点云微元划分示意图
2.1 ICP算法原理
ICP算法被称为最邻近点搜索法,其计算思路为:设三维空间中存在两组断面点云集P和Q,通过迭代法搜索P和Q两组断面点云中最邻近点,对并计算变换参数实现匹配,主要步骤如下:
(1)首先遍历云集P,取其中一点pi在点云集Q中查找点qi,使qi与pi之间距离最小,该两点即匹配成为对应点对(pi,qi),pi⊆P、qi⊆Q。
(2)按式pi=qi+Tj(j=1,2,…,n,为迭代次数)对点云集Q进行变换得到Q′(其中Tj为变换参数),变换完成后计算所有对应点对距离平方和d,即:
(3)
(3)重复上述迭代计算步骤,直到相邻两次计算d值之差小于指定阀值。
2.2 改进的高精度变形量计算方法
本文通过采用ICP算法对各断面角度微元点云数据进行匹配,并以两组点云对应角度微元进行变形计算可实现变形量的高精度提取,主要过程为:
(1)在点云数据集P和Q中分别拾取3个以上对应点对坐标,计算出初始匹配参数T′,以点云P为基准,使两组点云数据实现粗匹配,此时Q变换为Q′。
(2)遍历点云数据集P和Q′,建立与P中各点pi在Q′中最邻近点q′i的点对,并计算出此时的距离di。遍历点云集P,将所有最邻近点对距离平方和作为点云匹配完成度标准,即:
(4)
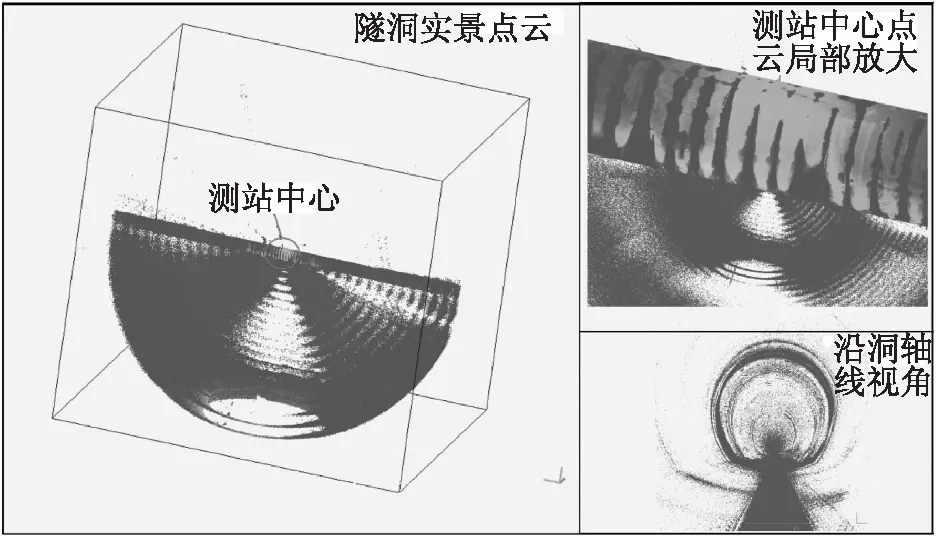
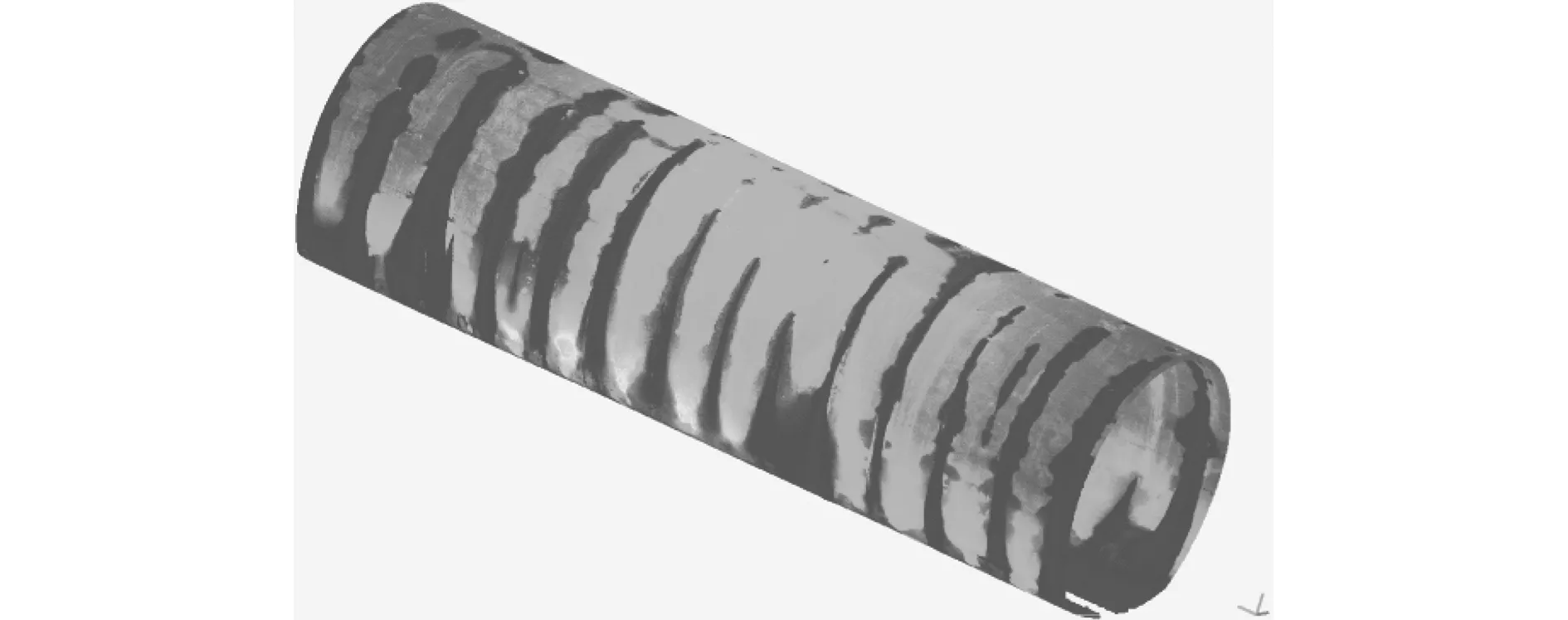
设定完成度标准值S,如果相邻两次计算d值之差Δd (3)重复步骤(2),直到满足Δd (4)对点云集Q″中各元素按变换后位置重新进行角度单元划分,并与点云集P各角度单元对应。 (5)按照径向距离计算各角度单元点云统计分布密度,由于引水隧洞内噪点多以稀疏分布,在单一角度单元中噪点多呈不聚类的孤点形式出现,可设定阀值将其去除。 (6)上述步骤计算完成后,可通过计算断面点云集中P和Q″中对应单元内数据点与隧洞拟合轴心的距离差值提取相对变形值。此外,对于更高精度的隧洞变形监测,可将断面角度单元进行更细小划分以识别更微小变形。 (7)最后,通过合成所有微断面变形数据,生成3D隧洞变形分析成果图。 在断面点云数据匹配完成后,断面角度单元径向点云密度去除阀值的设定较为重要。如果阀值设定过大,会使得噪点去除不彻底,使得微小变形被放大;而阀值设定过小,会使得数据点滤除过多,微小变形被掩盖。在高精度三维激光扫描情况下,在洞壁固定反射面将会存在高密度点云,而噪点一般零散分布、密集程度较低,因此可根据变形监测精度要求设定阀值。某断面角度单元沿径向点云密度分布如图2所示,在径向距离5.939~5.943m之间集中了该角度单元点云数量的78.8%,而其余径向距离中点云数量最大占比仅为1.9%。 图2 径向距离与点云数量分布统计图 某大型水力发电站为长引水式,设计有4条引水隧洞,平均洞线长度约为16.67km,洞群沿线一般埋深1500~2000m,最大埋深2525m;衬砌洞径为11.2~11.8m,断面形式主要为圆形、城门洞形和马蹄形。由于该引水隧洞群具有埋深大、洞线长、洞径大以及地质条件极为复杂等特点,在施工期就面临诸多难题,在运行期也成为重点监测对象。在2016、2018年枯水期分别两次对该水电站3#引水隧洞进行变形监测三维激光扫描。局部桩号段由于底部积水20~30cm和洞壁裂缝渗流,导致扫描点云数据中存在大量噪点,如图3所示。 图3 复杂洞段三维激光扫描原始点云图 当采用反射率法去噪时,由于局部洞壁存在渗水导致洞壁反射率过低,去噪过程中无法准确识别洞壁,导致大量洞壁缺失无法进行变形量分析计算;而通过采用点密度去噪方法可精确滤除噪点,保留完整清晰洞壁信息,如图4所示。 图4 点密度法去噪法处理后洞壁点云图 在两期扫描隧洞数据中,通过手动拾取特征点对洞段逐一匹配完成后,采用某常用隧洞分析软件按常规方法进行变形量计算,计算结果显示桩号段K16+300m~K16+350m的2016、2018年两次测试结果之间洞壁存在明显厘米级变形。 采用改进的洞壁变形方法进行计算,结果表明K16+300m~K16+350m桩号段洞壁整体无明显变形,仅局部存在细微变形。其中,变形量小于2mm的区域约占总面积的85.178%,变形量处于2~4mm的区域约占总面积的12.328%,变形量处于4~6mm的区域约占总面积的1.094%;此外,约占总面积0.014%的小范围区域存在10~40mm变形,区域面积为0.18m2。变形量平面展开色谱图如图6所示,从图中可明显发现该异常区域及其相对变形量;通过查看变形量3D色谱图,可快速、直观发现变形区域在隧洞段所处位置;通过查看隧洞实景点云和异常区域局部放大点云,可清楚掌握变形位置、变形量以及详细形态特征。 三维激光扫描技术已具有较高的测距精度和测试效率,如何在隧洞变形监测中最大限度发挥其优势,保证变形量的高精度提取是一项重要的研究内容。本文通过研究去噪方法、将ICP算法与断面微元匹配相结合,提出了实现高精度提取水工引水隧洞变形量的方法,并开展了相关试验工作。试验结果显示本文所提变形量算法计算结果与隧洞断面预埋监测仪测量结果一致性较好,尤其可精确识别隧洞局部微小变形,其3D监测成果连续、整体、直观。2.3 点云去噪阀值的设定

3 试验研究
4 结语
猜你喜欢
初中生学习指导·中考版(2022年1期)2022-02-09教学月刊·小学数学(2021年2期)2021-02-08摄影之友(影像视觉)(2020年4期)2021-01-09初中生学习指导·中考版(2020年2期)2020-09-10影像视觉(2020年4期)2020-05-09电子制作(2018年17期)2018-09-28智富时代(2018年8期)2018-09-28智富时代(2018年8期)2018-09-28北京航空航天大学学报(2017年9期)2017-12-18制导与引信(2017年3期)2017-11-02
