
矩阵式LED远光灯智能辅助控制系统
2019-08-27 02:26谭喜堂刘莎朱琴跃范清雯王晨
计算机应用 2019年6期
谭喜堂 刘莎 朱琴跃 范清雯 王晨
摘 要:针对现有汽车远光灯需要司机通过自身对路况的判断来完成手动操作,从而可能造成行车时因违规使用车灯而发生交通事故的问题,完成了基于不同路况和周围环境自动调节远光灯照射方式的矩阵式LED远光灯智能辅助控制系统的设计与实现。首先,根据车辆行驶特点及相关交通法规,针对不同的车前路况,提出矩阵式LED远光灯辅助系统的智能控制策略;然后,对系统的软硬件进行设计与实现,硬件部分主要包括主控制器模块、LED电源驱动模块以及矩阵开关控制模块的选型与电路设计,软件部分主要包括驱动电路控制、矩阵开关控制以及智能控制策略等功能模块;最后,在实验室环境下通过搭建完整的实验系统进行了功能测试。实验测试结果表明,所提方法控制结果准确、实时性好、可靠性高、易于实现,达到了预期目标。
关键词:矩阵式LED;远光灯辅助控制;智能控制策略;LED电源驱动;矩阵开关控制
中图分类号: TP273.5计算机控制系统
文献标志码:A
Abstract: Focusing on the problem that the existing car high-beam requires the driver to manually change the headlamp through his own judgment of the road condition, which may results in a traffic accident due to the illegal use of the high-beam, a matrix LED high-beam intelligent assistant control system which can automatically adjust the radiation way of high-beam according to the road condition and environment was designed and implemented. Firstly, according to the driving characteristics of vehicles and related traffic regulations, the intelligent control strategy of matrix LED high-beam assistant system was proposed for different road conditions. Then the hardware and software of the system were designed and implemented. In the hardware part, the device selection and circuit design of the modules like main controller, LED power driver and matrix switch controller were given, and the software part was composed of function modules like driving circuit control, matrix switch control and intelligent control strategy. Finally, a complete experiment system under laboratory conditions was built for functional test. The experiment test results indicate that the proposed method has accurate results and is steady, reliable, better in real-time and easy to realize, which achieves the expected goal.
Key words: matrix LED; high-beam assistant control; intelligent control strategy; LED power driver; matrix switch control
0 引言
隨着汽车保有量的不断增长,人们对于汽车安全的重视程度日益提高。据统计,在车辆夜间行驶中,LED远光灯的不当使用是造成事故发生的一大原因[1-2]。这主要是由于现有的汽车远光灯开关操作均由司机通过自身对于路况的判断来手动完成,其操作准确性很大程度上依赖于司机的注意力和经验,同时远光灯的滥用也会造成车外人员产生“炫目”从而引起严重事故。若汽车在行驶过程中能够通过其自身的判断主动进行LED远光灯控制,将会大幅提升汽车的主动安全性[3-4]。近年来日渐出现的基于矩阵光柱技术的矩阵式LED远光灯从本质上可提高汽车的主动安全性。该类远光灯由一定数量的光段组成,每个光段都由控制系统进行独立开通或关断控制。在这些光段的照射范围内,不同的车前位置被分为不同的区;在远光灯射程内,当车前目标进入远光灯的可控区域时,相应光段会自动关闭,其余光段仍保持开通,从而实现LED远光灯的自动控制[5-6]。
然而,矩阵式LED远光灯自动控制技术目前只在部分国外高端进口车型如奥迪A8高配[7-8]及奔驰CLS[9]等中有所应用,相关技术对我国仍处于未公开阶段,但其广阔的应用前景却引起我国相关车企及汽车备件生产厂商的广泛关注。近年来国内相关企业和机构相继开展自主研发,取得了初步成果,如:以飞思卡尔S9S08DZ60F2MLF为主控制器的矩阵式LED汽车前照灯电路的设计方法[10];由多个LED矩阵管理器构成矩阵管理单元以增加LED数量最多可达96颗[11];以TPS92661为LED驱动器件的矩阵式LED灯的亮、灭控制以及对光源矩阵的故障检测和管理方法[12]。上述方法主要完成了对LED矩阵灯亮、灭的自动控制,而如何根据不同路况和周围环境实时调整LED相关控制策略并未涉及。
为此,本文根据矩阵式LED远光灯的工作机理,结合现有汽车对远光灯的常规控制原理与方法,完成了矩阵式LED远光灯辅助控制系统的硬件、软件以及智能型LED照射控制策略的设计与实现,以期为国产车辆车灯的改进提供应用参考,同时也对部分进口车辆车灯的国产化维保提供技术支持。
1 矩阵式LED远光灯控制策略设计
1.1 远光灯辅助控制系统总体设计思路
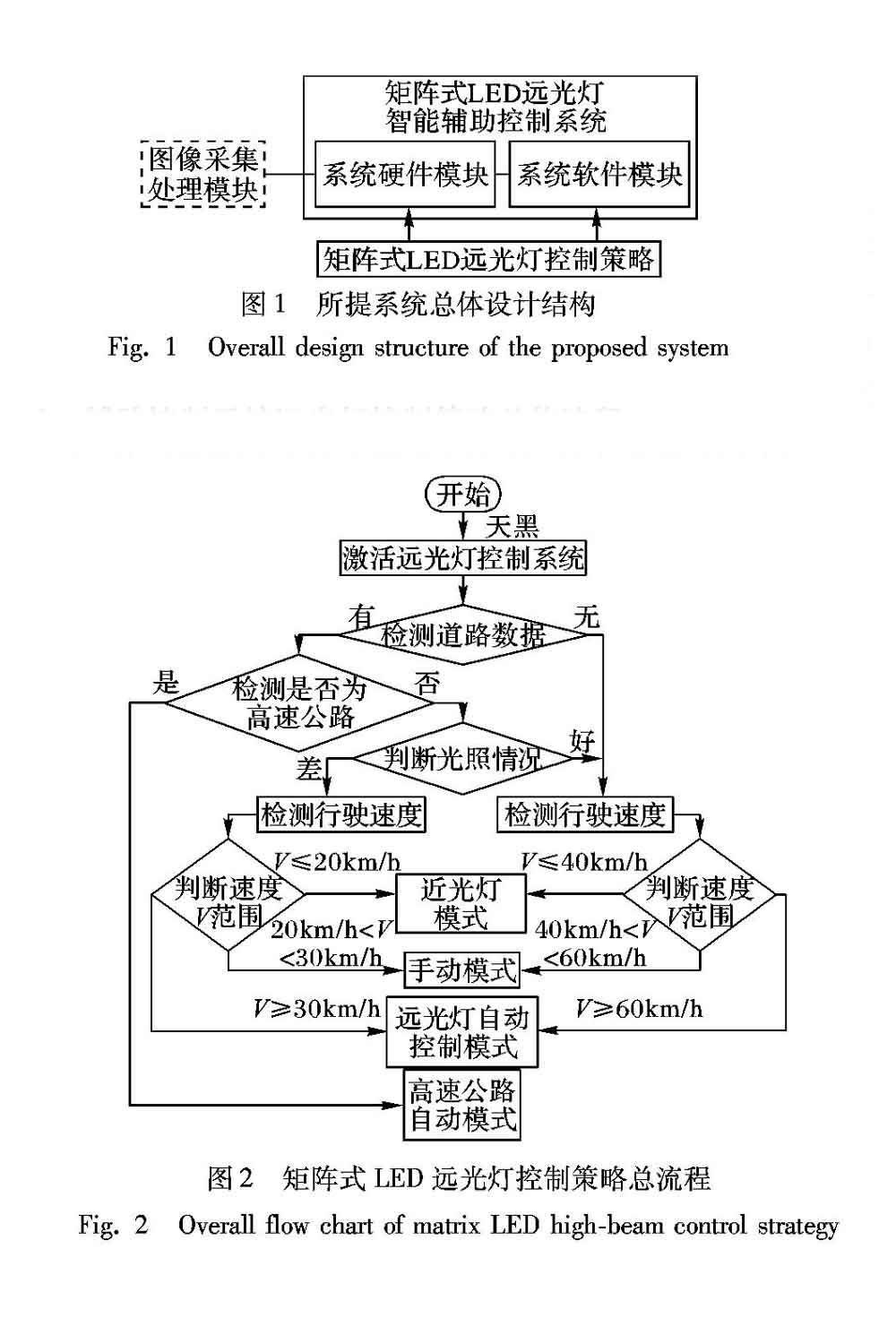
矩阵式LED远光灯智能辅助控制系统实现的功能为:根据安全驾驶规范,判断当前路况,针对会车、前方有车、避让行人等情况,在保证安全的前提下,根据实时路况主动调节远光灯的开关控制,同时最大限度使用远光灯照明,从而提升汽车安全的主动性,改善驾驶舒适性。基于此,所提系统的总体设计结构如图1所示,主要由图像采集和处理模块(本设计不涉及)、系统硬件模块、系统软件模块和矩阵式LED远光灯控制策略组成。
1.2 辅助控制系统远光灯控制策略总体流程
根据汽车远光灯的实际应用可知,远光灯的自动控制主要需实现高速公路、会车、前方有车或行人等不同情况下矩阵式LED的自动开通和关断。为此,结合远光灯使用的相关法规,所提系统所设计的矩阵式LED远光灯控制策略总流程如图2所示。下文将针对前方有车、前方有人、高速公路自动模式三种典型情况分别对远光灯自动控制策略进行设计。
1.3 不同路况时远光灯自动控制策略设计
1.3.1 光段及LED状态变量定义
由于LED的电流强度(亮度)由驱动模块进行控制,故远光灯自动控制策略主要实现对LED光段和每个LED的亮灭控制。
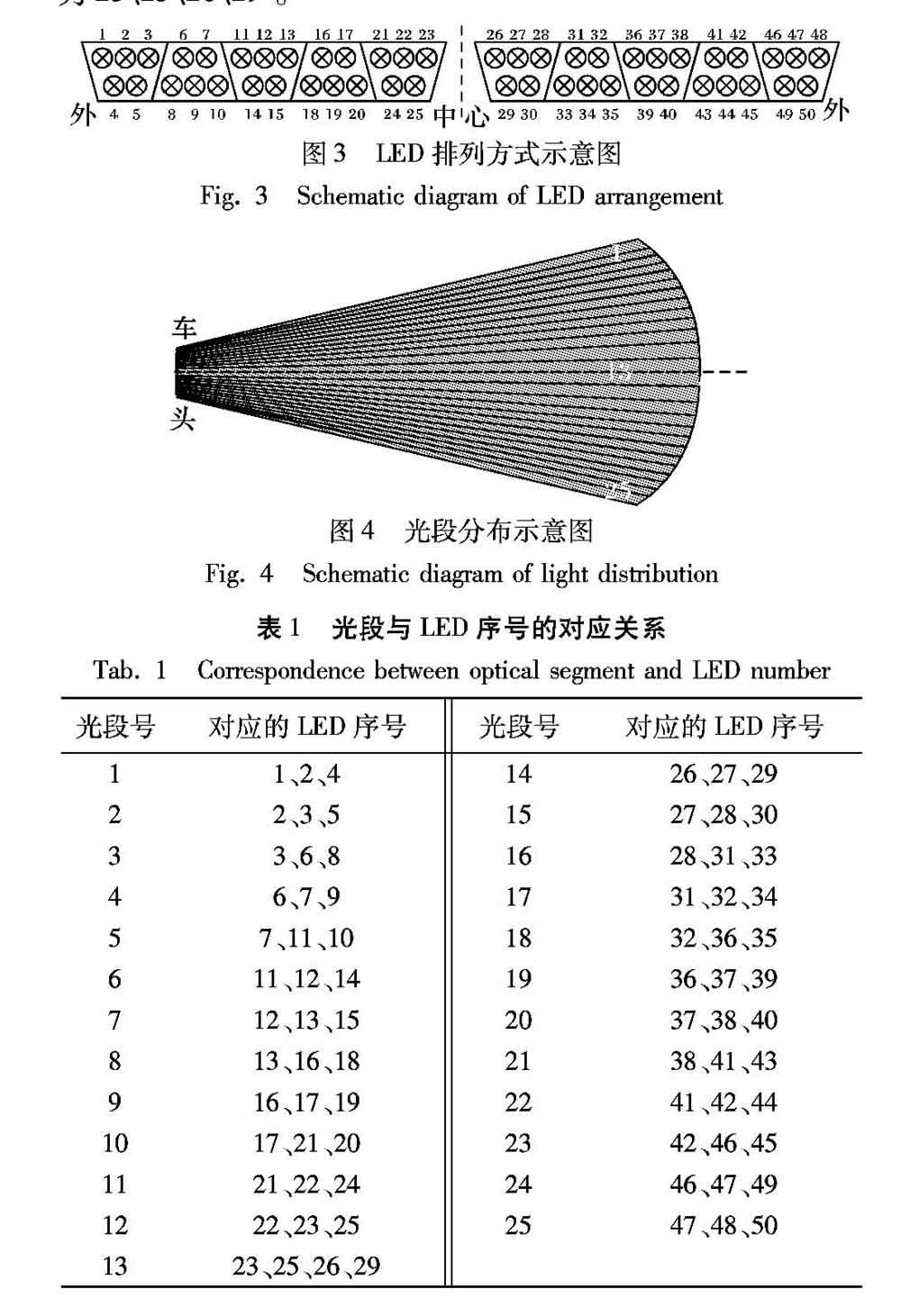
為便于描述,假设控制对象为由50个LED组成的汽车前远光灯,该远光灯两侧对称分布,即左右两侧各25个LED。根据矩阵光柱形成原理可知,该远光灯的50个LED通过排列组合可形成25个独立光段,每个光段里可包含多个LED,且每个LED也可属于不同光段。若远光灯LED排列方式如图3所示,其中:数字1~50为每个LED的序号,则相应的25个光段分布示意如图4所示,且每个光段与LED的对应关系如表1所示。由表1可见,所有光段中除13号光段外,其余每个光段均对应3个LED,且呈“V”字型排列;而第13号光段由于位于最中间,故其对应中间位置的4个LED,序号分别为23、25、26、29 。
为了直观地描述每个LED光段的亮灭状态与各个LED亮灭状态间的关系,现分别定义三个变量:光段状态变量Si(i=1,2,…,25),LED分状态变量Lj,k(j=1,2,…,50;k=1,2),LED总状态变量Lj(j=1,2,…,50),各个变量具体含义及相互间的逻辑关系如下:
2)由于每个LED可能存在于多个光段中,故分别在某个光段变量内定义相应的LED分状态变量。Lj,k即表示第j号LED的第k个分状态变量,一个LED最多包含在两个光段内,故k的取值为1或2。例如第2号LED,同时包含在第1、2号光段内,则第2号LED在光段1中的分状态变量为L2,1,在光段2中的分状态变量为L2,2。当第i号光段为灭即Si=0,Si对应的所有LED分状态变量均为0;当第i号光段为亮即Si=1,Si对应的所有LED分状态变量均为1。
3)LED总状态变量取决于对应分状态变量,与实际LED的开关状态对应。当第j号LED的所有分状态变量全为0时,其LED总状态变量为0,该LED为灭;否则其LED总状态变量为1,LED为亮。第j号LED的总状态变量Lj与分状态变量Lj,k的关系如式(1)所示:
基于上述各个变量的定义及每个LED光段的亮灭状态与各个LED亮灭状态间的关系,下面对不同路况下的矩阵式LED远光灯自动控制策略进行设计。
1.3.2 前方有车
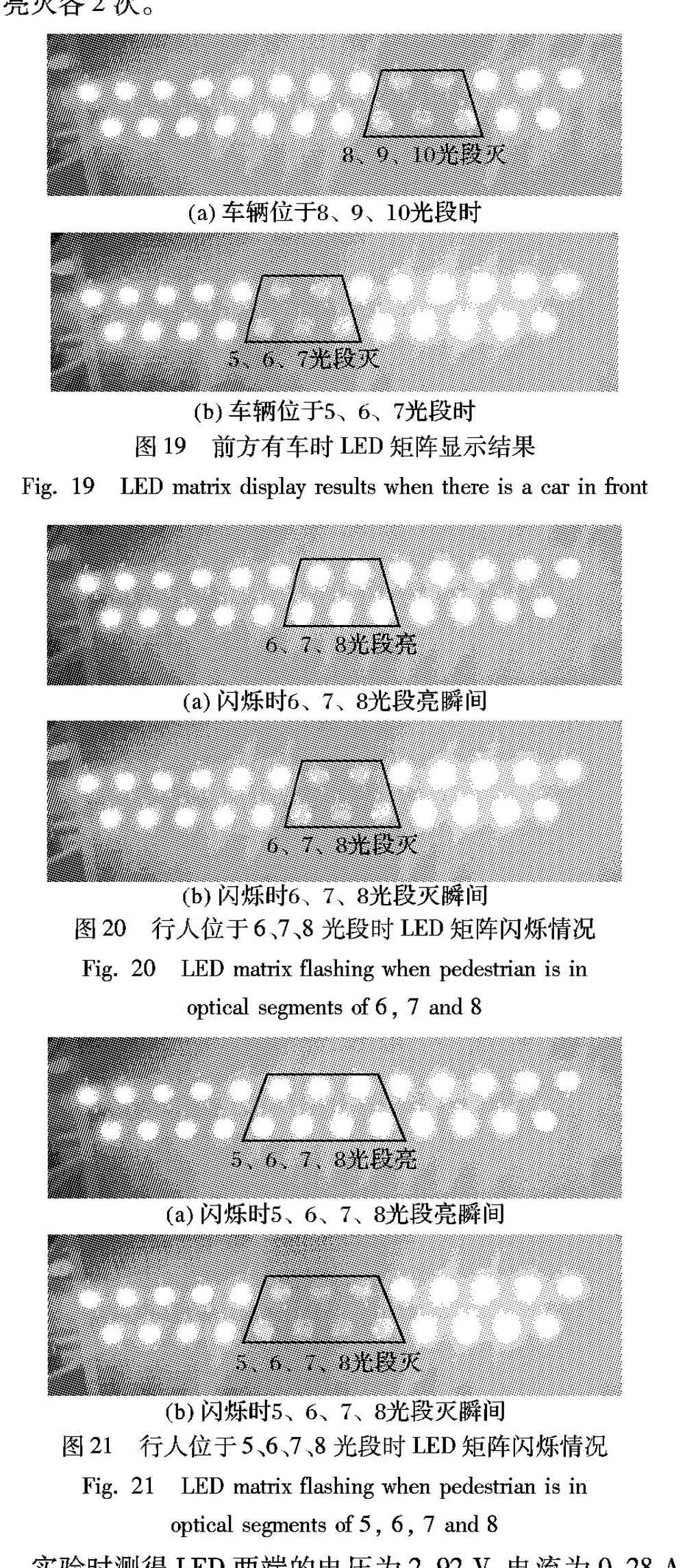
众所周知,会车时司机一般会关闭远光灯来防止对方司机产生“炫目”,但若将其全部关闭则会使远光灯无法得到最佳使用。为此,若在前方有车时(包括超车、会车等情况)欲合理地使用远光灯,可关闭前方车辆所处位置的光段,保持其他光段处于打开状态。这样既能防止其他车辆炫目,又能保证驾驶者视野清晰,减轻夜间行驶的心理压力和惶恐感,从而提高夜间行车的安全性,如图5~6所示。
为此,相应的矩阵式LED远光灯自动控制策略设计步骤如下:
1)车前车辆识别。在车辆行驶过程中,基于图像采集和处理模块实时识别前方车辆。
2)车前车辆定位。根据实时识别所获取的数据对前方车辆进行定位,实时获得前方车辆的位置信息,并基于此确定此刻前车所处位置对应的LED远光灯光段号。
3)远光灯控制。根据上述计算而得的LED光段号,分析全部LED的当前状态,实现矩阵式LED远光灯中每个LED的亮灭控制。
4)重复上述步骤1)~3),直至前车驶出远光灯照射范围。
下面通过实例就上述控制策略对矩阵式LED远光灯的自动控制效果进行分析。
如图7所示,假设在t1时刻前方车辆位于距离本车较远的位置A处,首先通过图像采集和处理模块检测并识别到该车所处位置后,经计算可得其对应LED远光灯光段为第8~10号,为此应使该光段状态变量内所有LED分状态变量全为0,其余光段内的LED分状态变量为1,即关闭第8~10号光段,最终可确定LED总状态变量L16~L20=0,即关闭第16~20号LED。
假设在t2时刻,前方车辆位于距离本车较近的位置B处,如图8所示。同样经过图像采集和处理后,计算分析可得该车对应LED远光灯光段为第4~8号,即关闭第4~8号光段,最终可确定关闭第7、9、10~15、18号LED。
1.3.3 前方有行人
夜间光线较暗,司机视野窄,视线模糊,更不易看清路边行人[13],对矩阵式LED实现闪烁控制,可警示司机和行人,提升安全性。相应的自动控制策略设计步骤如下:
1)车前行人识别。在车辆行驶过程中,基于图像采集和处理模块实时识别前方行人。
2)车前行人定位。根据实时所获取的数据对前方行人进行定位,实时获得前方行人的位置信息,并基于此确定此刻行人所处位置所对应的LED远光灯光段号。
3)远光灯控制。根据上述计算而得的LED光段号,分析全部LED的当前状态,对行人所处光段对应的LED实现闪烁控制,闪烁的周期为0.5s,即对应LED每秒钟亮灭各2次,警示行人和司机。
4)重复上述步骤1)~3),直至行人离开远光灯照射范围。
如图9所示,假设在行车过程中,图像采集和处理模块检测并识别到前方行人出现在第21~24号光段内,经过计算分析,最终实现第41~45、46、49号LED的亮灭闪烁,闪烁周期0.5s,提醒行人和司机。
1.3.4 高速公路自动模式
相比行驶在一般道路,高速公路上车辆行驶的特点是车速快,车辆密度低,侧向干扰少[14],此时司机的视角会变窄,远光灯的照射范围也要随之收窄一些,以便与高速公路的结构特点更匹配。
本模式下的矩阵式LED远光灯自动控制策略设计思路为:高速公路模式下,当图像采集和处理模块识别到前方无车辆进入远光灯照射范围,关闭两侧的数个光段,其余光段亮起;当识别到前方有车辆进入远光灯控制范围内时,除了关闭两侧光段,其余光段的控制按1.3.2节和1.3.3节中所述的不同情况下的远光灯自动控制策略进行控制。图10为高速公路自动模式下远光灯全亮时各个光段状态与相应LED状态间的对应关系。图10(a)中,深色区域表示光段亮,白色区域表示光段灭;图10(b)中,黑色圆圈代表LED亮,白色圆圈代表LED灭。
2 智能辅助控制系统设计
2.1 系统硬件设计
2.1.1 系统硬件总体设计
根据系统的功能需求,矩阵式LED远光灯辅助控制系统硬件总体结构如图11所示,主要包括主控制器(MicroController Unit, MCU)模块、LED电源驱动模块和矩阵开关控制模块。
2.1.2 MCU控制模块设计
本系统中MCU控制模块与其他硬件模块间的接口设计如图12所示。其中,本模块电路通过串行外设接口(Serial Peripheral Interface, SPI)总线与LED电源驱动模块相连,通过I2C(Inter-Integrated Circuit)总线与矩阵开关控制模块相连。
MCU控制模块的硬件主要包括MCU接口电路、联合测试工作组(Joint Test Action Group, JTAG)调试接口电路和工作电源转换电路。具体设计时,综合考虑MCU的运行速度、成本和系统外设等需求,选取Silicon公司的C8051F410器件为系统MCU。该器件内部自带24MHz晶振,且具有UART、SPI、I2C总线接口,片上系统稳定可靠。同时,为提高系统控制的可靠性,设计中选用了DC/DC电源模块HDW10-24S3V3,用以实现直流24V到3.3V的转换及供电工作。
2.1.3 LED电源驱动模块设计
在本设计中,拟驱动25个白光LED,故对驱动电源芯片的要求较高:输入电压范围较大;LED负载串联所导致的输出电压范围较大;恒流驱动,输出电流检测基准小;可脉冲宽度调制(Pulse Width Modulation, PWM)调光[15-16];耐受汽车级温度(-40℃~125℃)。综合上述要求,本设计选用安森美公司的NCV78763作为远光灯的驱动电源芯片。NCV78763是先进的智能电源镇流器及双通道LED驱动器,提供高能效的单芯片汽车照明方案,其内部DC-DC拓扑为Boost-Buck拓扑结构,具有两个Buck电路,能够驱动电压达60V的两串LED,每路最大能够输出1.6A的直流电流。内置电流模式电压升压控制器,能对输入电流滤波。内置PWM调光功能,频率可达4kHz,此外还提供PWM直接馈送选择,用于从外部微控制器进行完整频率及精度范围的控制。
为此,本文中LED电源驱动电路的硬件设计主要包括NCV78763的Boost电路、Buck电路和SPI接口电路,电路设计原理图如图13所示。其中Boost、Buck电路在完成接口电路设计的基础上还需根据设计需求对其外围接口电路的各个参数进行计算和设计。
2.1.4 矩阵开关控制模块设计
由于本设计中LED采用串联连接方式来保证电流的一致性,为了实现单个LED的亮灭控制,本设计采用开关并联在LED两侧的方式来实现单个LED的亮灭控制。开关打开,LED正常亮起;开关闭合,LED因被短路而熄灭。因此,矩阵开关控制模块的设计思路是,根据接收到的MCU控制模块的控制信号,对单个开关进行动作,通过将开关与LED进行并联,直接控制并联LED的亮灭。考虑设计需求和开关芯片的经济性,选择凌力尔特公司的LT3965作为矩阵开关芯片。
LT3965芯片内有8个独立的NMOS开关,每个开关可作用于1~4个LED,具有可编程的开路和短路故障报警,支持I2C传输,拥有4位可配置的I2C地址,一条I2C总线上最多可以接入16个LT3965芯片。输入电压范围宽,可以为8~60V,与驱动电源芯片NCV78763支持的输入电压范围基本匹配。本设计中共有25个LED,故選用4个LT3965芯片。
MCU接口连接图如图12 所示,矩阵开关控制电路与MCU通过2路I2C总线相连,分别为时钟线SCL和数据传输线SDA。本设计中,4个LT3965芯片的SCL和SDA接口同时与MCU的SCL和SDA接口相连,MCU可以通过地址匹配准确控制不同LT3965,即控制每个LED开关,使得对应LED完成亮灭动作。矩阵开关控制电路示意图如图14所示。
2.2 系统软件设计
2.2.1 系统软件总体设计
MCU系统控制软件设计包含三部分:1)与图像采集和处理模块的通信软件设计(本文不涉及);2)LED电源驱动模块控制软件设计;3)矩阵开关模块控制软件设计。图15为矩阵式LED远光灯智能辅助控制系统的总体软件设计架构。
如图15所示,MCU系统控制软件的功能是,接收图像采集和处理模块的目标检测结果信号,再分别对LED电源驱动模块和矩阵开关模块进行控制,从而调节LED远光灯的亮度和照射区域;对LED电源驱动模块的控制过程包括判断车前路况,计算LED驱动电路的各参数,计算NCV78763寄存器设置参数,从而通过SPI串口通信实现控制信号传输;对于矩阵开关模块的控制过程包括判断车前路况,计算所有LED状态变量,计算LT3965寄存器设置参数,从而通过I2C串口通信实现控制信号传输。
2.2.2 LED电源驱动控制模块软件设计
驱动控制即根据当前的路况信息来设置驱动电源芯片NCV78763,若当前进入夜间照明状况较差的道路,且远光灯自动控制模式打开,即可按照远光灯自动控制下的驱动要求对驱动模块进行设置。设置方式为通过SPI通信接口来设置NCV78763相关的寄存器,相应的对 NCV78763的控制软件流程如图16所示。
由图16可知,MCU经过SPI初始化后,开启全局中断,当接收到路况信息后,MCU计算LED驱动电路输出情况是否需要更新。若需更新,则计算LED驱动电路在当前路况下所需的电流、电压输出值,并将其转换成NCV78763芯片控制寄存器的参数设置值,再将此参数值通过SPI串口传输至NCV78763相应的寄存器中,传输结束后释放SPI中断。
本控制软件主要设计函数有:
1)char ModeDetect (void)。主要用于当MCU根据接收到的路况信息来判断电路是否需要更新驱动电路输出。
2)void LEDDRIVERcalculate (void)。主要用于驱动电路输出需要改变时,根据检测到的道路情况,计算LED驱动电路参数。
3)void NCVREGISTERcalculate (void)。主要用于计算NCV78763相关寄存器的参数值。
4)void SPISendReceive (void) interrupt 1。定时中断函数,主要用于MCU与NCV78763的SPI传输。
2.2.3 矩阵开关控制模块软件设计
矩阵开关控制软件的功能为根据图像目标检测信息来控制开关芯片状态,从而实现LED远光灯的亮灭控制。MCU从图像采集和处理模块接收25个光段的状态,分析计算该信息,确定25个光段内50个LED的开关状态,再通过I2C通信将控制信号发送给开关芯片LT3965,从而控制每个LED的亮灭。图17为矩阵开关控制软件流程。
3 实验系统搭建与调试分析
3.1 实验系统搭建
在实验室环境下搭建的实验系统硬件实物如图18所示,主要包括:输入直流电源(1)、MCU控制和LED驱动电路板(2)、LED开关控制电路板(3)、LED矩阵(4)及上位PC(5)。
3.2 结果分析
实验测试系统搭建完成后,在实验室環境下,对不同路况下矩阵式LED远光灯的控制策略进行实验测试。
4 结语
本文针对矩阵式LED远光灯辅助控制系统完成了相应的设计,在实验室环境下实现功能测试与验证。与现有相关方法相比,本文所提方法的优越性主要体现为:1)提出了基于不同车前路况和周围环境的自适应矩阵式LED远光灯智能控制策略。2)在确保实现LED智能照射控制的前提下,简化并优化了系统软硬件设计:硬件方面的核心器件如MCU、LED电源驱动模块分别选用了集成度高、主频速度快、功能强大、外围接口资源丰富的新型器件,性价比高,电路实现简单,易于扩展;软件设计更加关注控制结果的准确性、实时性与可靠性。3)从实验室测试结果可知,该方法易于实现,复杂度尚可,具有良好的工程应用前景。然而,在实际工业应用场合,如何在各种复杂、不同车前路况下保证系统稳定检测车前运动目标的前提下进一步协调优化系统控制的响应速度与灵敏度还需开展进一步的研究。
参考文献 (References)
[1] CHENG H Y, HSU S H. Intelligent highway traffic surveillance with self-diagnosis abilities [J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1462-1472.
[2] GONNER S, MULLERT D, HOLD S, et al. Vehicle recognition and TTC estimation at night based on spotlight pairing [C]// ITSC 2009: Proceedings of the 2009 12th International IEEE Conference on Intelligent Transportation Systems. Piscataway, NJ: IEEE, 2009: 196-201.
[3] CONNELL J H, HERTA B W, PANKANTI S, et al. A fast and robust intelligent headlight controller for vehicles [C]// Proceedings of the 2011 IEEE Intelligent Vehicles Symposium. Piscataway, NJ: IEEE, 2011: 703-708.
[4] 宋朋朋.汽车前照灯智能控制系统的研究[D].南京:南京林业大学,2012:8-12.(SONG P P. Research of automotive headlight intelligent control system [D]. Nanjing: Nanjing Forestry University, 2012: 8-12.)
[5] 罗德智,牛萍娟,郭云雷,等.汽车前照大灯智能化的现状与发展[J].照明工程学报,2017,28(5):72-78.(LUO D Z, NIU P J, GUO Y L, et al. The present situation and development of intelligent headlight of automobile [J]. China Illuminating Engineering Journal, 2017, 28(5): 72-78.)
[6] 朱彦.奥迪灯光照明出奇招开创轿车安全新未来(下)[N].电子报,2014-08-17(12).(ZHU Y. Audi lighting surprises to create a new future for car safety (Ⅱ)[N]. The Electronic Newspaper, 2014-08-17(12).)
[7] 张明.奥迪矩阵式LED前大灯(上)[J].汽车维修技师,2014(10):34-36.(ZHANG M. Audi matrix LED headlights (Ⅰ) [J]. Auto Maintenance, 2014(10): 34-36.)
[8] 张明.奥迪矩阵式LED前大灯(下)[J].汽车维修技师,2014(11):27-33.(ZHANG M. Audi matrix LED headlights (Ⅱ) [J]. Auto Maintenance, 2014(11): 27-33.)
[9] 武汉通畅汽车电子照明有限公司.矩阵式LED大灯:中国,CN201621107407.5[P].2017-04-12.(Wuhan Tongchang Automotive Electronics Lighting Company Limited. Matrix LED headlights: China, CN201621107407. 5 [P]. 2017-04-12.)
[10] 上海晨阑光电器件有限公司.矩阵式LED汽车前照灯:CN201420554802.2[P].2015-01-21.(Shanghai Chenlan Optoelectronic Devices Company Limited. Matrix LED headlights: CN201420554802.2 [P]. 2015-01-21.)
[11] 上海小糸车灯有限公司.用于汽车车灯的矩阵式LED驱动控制系统及控制方法:CN201710538962.6[P].2017-12-19.(Shanghai Koito Automotive Lamp Company Limited. Matrix LED drive control system and control method for automotive lamp: CN201710538962.6 [P]. 2017-12-19.)
[12] 常州星宇車灯股份有限公司.一种矩阵式LED自适应汽车前照灯控制系统及方法:CN201710223386.6 [P].2018-09-25.(Changzhou Xingyu Automotive Lamp Company Limited. Matrix LED adaptive automobile headlight control system and method: CN201710223386.6 [P]. 2018-09-25.)
[13] 林金奕.夜间行人检测技术的研究现状[J].中国市场,2016(15):45-46.(LIN J Y. Status of night pedestrian detection technology research [J]. China Market, 2016(15): 45-46.)
[14] 刘永斌.多种路况下智能前大灯控制系统研究[D].洛阳:河南科技大学,2018:24-25.(LIU Y B. Research on intelligent headlamp control system under various road conditions [D]. Luoyang: Henan University of Science and Technology, 2018: 24-25.)
[15] 徐飞.带有宽频PWM调光范围的高效升压型白光LED驱动的设计[D].杭州:浙江大学,2013:14-29.(XU F. Design of high efficiency boost white LED driver with wide range PWM dimming [D]. Huangzhou: Zhejiang University, 2013: 14-29.)
[16] 朱章丹. 一种具有模拟及数字调光的LED驱动电路设计[D].成都:电子科技大学,2016:44-50.(ZHU Z D. Design of analog and digital dimming LED drive circuit [D]. Chengdu:University of Electronic Science and Technology of China, 2016: 44-50.)
