
考虑决策者时序偏好的时域证据融合方法
2019-08-27 02:26李旭峰宋亚飞李晓楠
计算机应用 2019年6期
李旭峰 宋亚飞 李晓楠

摘 要:针对时域不确定信息的融合难题,为充分体现时域信息融合的动态性特点和时间因素对融合的影响,在证据理论的基础上,提出一种考虑决策者时序偏好的时域证据融合方法。首先将决策者对时序的偏好融入时域证据融合,通过分析时域证据序列的特点,在定义时序记忆因子的基础上,对决策者的时序偏好进行度量;然后通过构建优化模型求解时序权重,再结合证据信任度的概念,对证据源进行修正;最后利用Dempster组合规则对修正后的证据进行融合。数值算例表明,与没有考虑时间因素的融合方法相比,考虑决策者时序偏好的证据融合方法可以有效处理时域信息序列中的冲突信息,得到合理的融合结果;同时,所提方法充分考虑了时域证据序列的信任度和决策者的主观偏好,可以反映决策者主观因素对时域证据融合的影响,较好地体现了时域证据融合的动态性特点。
关键词:证据理论;时序偏好; 时序权重;证据信任度;证据融合
中图分类号: TP391
文献标志码:A
Aiming at temporal uncertain information fusion problem, to fully reflect the dynamic characteristic and the influence of time factor on temporal information fusion, a temporal evidence fusion method was proposed with considering decision makers preference for time sequence based on evidence theory. Firstly, time sequence preference of decision maker was fused to temporal evidence fusion, through the analysis of characteristics of temporal evidence sequence, decision makers preference for time sequence was measured based on the definition of temporal memory factor. Then, the evidence source was revised by time sequence weight vector obtained by constructing the optimal model and evidence credibility idea. Finally, the revised evidences were fused by Dempster combination rule. Numerical examples show that compared with other fusion methods without considering time factor, the proposed method can deal with conflicting information in temporal information sequence effectively and obtain a reasonable fusion effect; meanwhile, with the consideration of the credibility of temporal evidence sequence and the subjective preference of decision maker, the proposed method can reflect the influence of subjective factors of decision maker on temporal evidence fusion, giving a good expression to the dynamic characteristic of temporal evidence fusion.
Key words: evidence theory; time sequence preference; time sequence weight; evidence credibility; evidence fusion
0 引言
多源信息融合系統通过对来自多信息源的数据和知识进行综合,以形成对目标信息的统一描述,多源信息融合技术已经在很多领域得到了广泛的应用。在实际应用中,信息源获取的原始信息可能存在非完备性,多源信息之间也可能存在矛盾性,这些都将导致融合结果存在很大的不确定性。因此,需要使用不确定信息处理的理论和方法,对非完备信息进行有效融合,这对融合效果的提升具有重要意义[1]。在众多可用于处理不确定信息的理论和方法中,证据理论以基本概率分配函数及其相关函数为基础[2-3],可以从多个角度合理量化信息中包含的不确定性,具有兼备主观性与客观性的优点。证据理论中的Dempster规则及相关改进方法也可以在决策层实现不确定信息的有效融合。此外,在融合不确定信息的过程中,证据理论基本摆脱了对先验信息的依赖。由于以上优点,证据理论在决策层融合识别中得到了广泛应用[4-10],一方面,研究者结合具体应用背景,对证据理论中的不确定性度量、冲突证据组合、证据可靠性评估等问题开展了研究[4-6];另一方面,证据理论与其他不确定性理论之间的关系也受到了广泛关注[7-10]。
目前基于证据理论的不确定信息融合大都是围绕多源不确定信息开展的,是基于证据理论对特定时刻多信息源提供的不确定信息进行融合,可以称之为空域证据融合。在空域证据融合中,所有证据源都是在特定时刻一次性全部获得的,它们参与融合的顺序没有差别。目前针对证据组合方法的改进主要是针对空域证据融合。然而,对于复杂的信息融合系统而言,不可能在一个时间节点一次性地完成所有信息的获取与融合,因此需要对多个时间周期内的不确定信息依次进行融合。与空域证据融合相对应,对单一信息源在多个周期内获得的证据进行的融合称为时域证据融合。在时域证据融合中,各个证据是按时间顺序依次参与融合的,时间因素对时域证据融合的结果有较大影响。
在空域证据融合方法研究的基础上,时域证据融合也逐渐受到研究者的关注[3-7]。20世纪90年代,Hong等[12]对空域证据与时域证据的综合融合问题进行了研究,提出了三种时空信息融合模型,包括递归集中式融合模型、递归分布式无反馈融合模型和递归分布式有反馈融合模型,对比分析了三种融合模型的特点;但是并没有针对时域证据的特点给出具体的融合方法。基于对这三种融合模型的改进,洪昭艺等[13]提出了一种新的混合式模型用于时空信息融合;但对时域信息进行融合时运用的是经典Dempster规则。
基于递归集中式融合模型,刘永祥等[14]以反导作战为背景,参考导弹防御系统配置,建立了基于时空信息序贯融合的目标综合识别模型,将专家知识、环境信息以及测量信息对目标识别的影响共同纳入综合识别流程。该模型首先对所有传感器当前时刻的识别结果进行空域融合,然后将当前时刻的空域融合结果与前一时刻的累积融合结果进行时域融合。在时域融合中,直接使用Dempster规则进行融合。由于Dempster规则在融合冲突较大的证据时会获得不合理结果,所以该模型的鲁棒性并不好。吴俊等[15]基于多平台多雷达目标识别系统提出了三级信息融合架构,在进行时域融合时,也是基于Dempster规则和证据折扣运算,只是折扣因子的确定是基于时域证据之间的相互关系。Fan等[16]在对时域证据推理进行研究时,基于时域证据之间的相互关系对时域证据的可靠度进行评估,虽然考虑了时域证据的动态性特点,但是没有体现时间因素对融合结果的影响。
通过以上分析可以发现,时域证据组合方法融合的研究大都是在空域证据融合的基础上开展的,缺乏针对性,不能充分反映时域证据融合的动态性和序贯性特点,时间因素对时域证据融合的影响规律更是鲜有涉及。时域证据融合还有待于进一步的深入研究,有必要基于时域信息的特点有针对性地构建有效的时域证据融合框架。
时域证据融合的鲜明特点在于不确定信息序列的顺序对融合结果有显著影响,即在融合过程中需要考虑时间因素的作用。本文将基于时域证据序列的特点,提出一种基于时序重要度因子的时域证据融合方法,在确定时序重要度时,需要区分历史信息与新信息的可靠度因子,因此需要结合决策者对时序信息的偏好来确定时序重要度。
1 证据理论
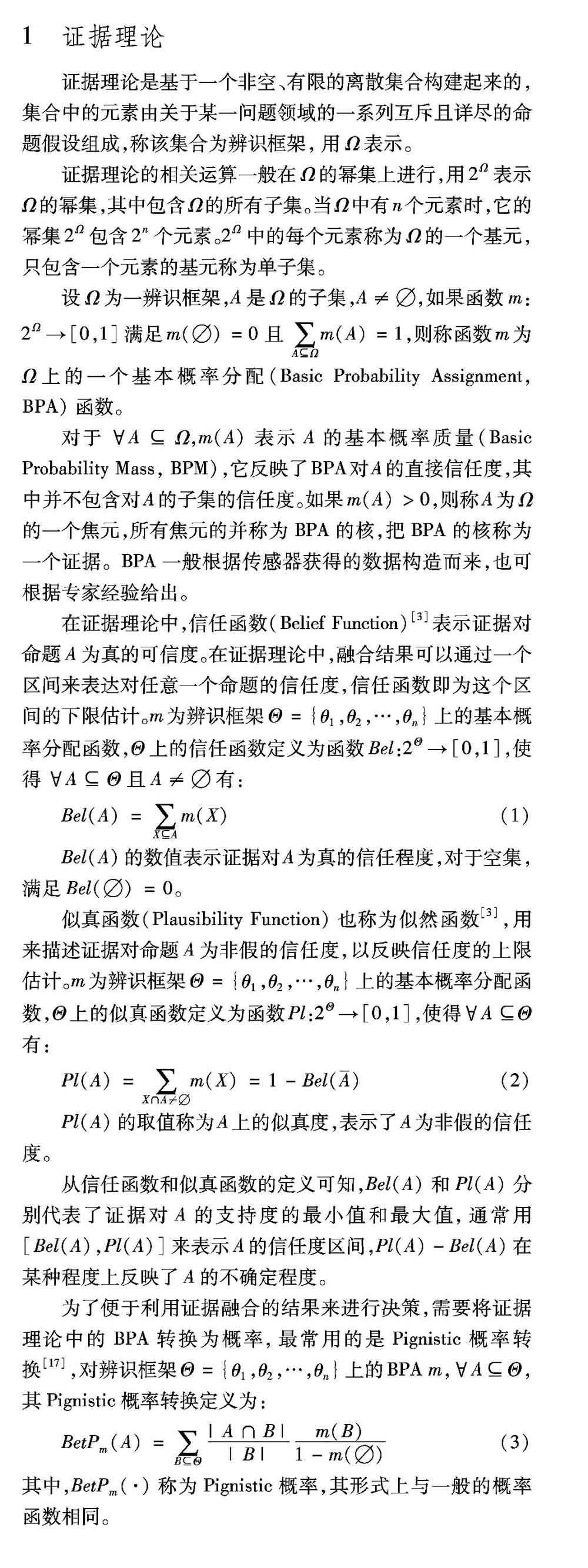
证据理论是基于一个非空、有限的离散集合构建起来的,集合中的元素由关于某一问题领域的一系列互斥且详尽的命题假设组成,称该集合为辨识框架,用Ω表示。
证据理论的相关运算一般在Ω的幂集上进行,用2Ω表示Ω的幂集,其中包含Ω的所有子集。当Ω中有n个元素时,它的幂集2Ω包含2n个元素。2Ω中的每个元素称为Ω的一个基元,只包含一个元素的基元称为单子集。
设Ω为一辨识框架,A是Ω的子集,A≠,如果函数m:2Ω→[0,1]满足m()=0 且 ∑AΩm(A)=1,则称函数m为Ω上的一个基本概率分配(Basic Probability Assignment, BPA)函数。
对于AΩ,m(A)表示A的基本概率质量(Basic Probability Mass, BPM),它反映了BPA对A的直接信任度,其中并不包含对A的子集的信任度。如果m(A)>0,则称A为Ω的一个焦元,所有焦元的并称为BPA的核,把BPA的核称为一个证据。BPA一般根据传感器获得的数据构造而来,也可根据专家经验给出。
在证据理论中,信任函数(Belief Function)[3]表示证据对命题A为真的可信度。在证据理论中,融合结果可以通过一个区间来表达对任意一个命题的信任度,信任函数即为这个区间的下限估计。m为辨识框架Θ={θ1,θ2,…,θn}上的基本概率分配函数,Θ上的信任函数定义为函数Bel:2Θ→[0,1],使得AΘ且A≠有:
2 证据信任度
证据信任度用来表示某一证据源的被信任程度,在缺乏先验信息的情况下,证据信任度评估大都是基于“少数服从多数的原则”开展的,在证据源提供的原始证据中,如果某个证据得到大多数证据的支持,那么可以赋予该证据较高的信任度;在只有两个证据的情况下,如果二者之间有较大的冲突,那么认为这两个证据至少有一个是不可信的。所以,证据信任度评估基本上都是基于证据冲突度量、证据距离度量、证据相似度度量来开展的,这类评估方法可统一表述如下:
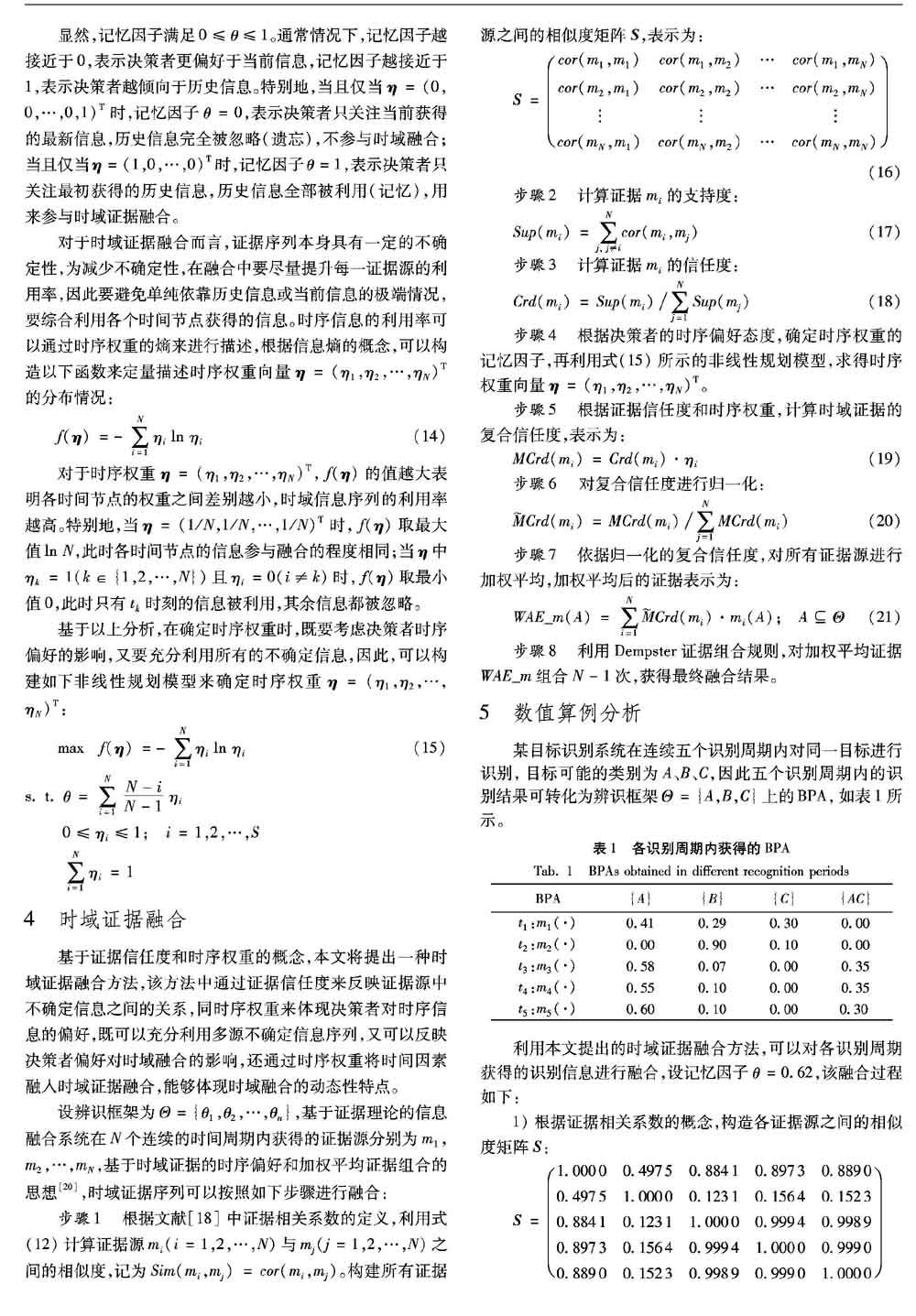
设定义在辨识框架Θ={θ1,θ2,…,θn}上的N个BPA分别为m1,m2,…,mN,Sim(mi,mj)为mi、mj之间的相似度度量,那么可以构建相似度矩阵:
3 时序权重
在对时域证据进行融合时,除了要对证据可信性进行评估外,还应该考虑时域证据信息流的时间序列对融合结果的影响,因此,需要依据时序权重来对证据源进行修正。
设融合系统在S个时间节点t1,t2,…,tS上获得的证据分别为m1,m2,…,mS,每一时间节点上的证据的重要度ηi(i=1,2,…,S)构成时序权重向量η=(η1,η2,…,ηS)T,满足0≤ηi≤1(i=1,2,…,S),∑Si=1ηi=1。时序权重反映了信息获取先后顺序对融合结果的影响程度,时域证据的时序权重只与其在时间序列中的位置有关,与时域证据的具体信息无关。时序权重的不同取值体现的是决策者对时序信息的偏好,即更注重历史信息还是最新获得的信息,该权重是传感器工作可靠性与环境复杂性的综合反映,如果传感器性能随时间有衰减,那么应该更加注重历史信息;如果传感器性能随时间而改善,那么应该更加注重最新信息。基于此,可以定义记忆因子来描述决策者的时序偏好,以此来反映时域信息在时域融合中的重要度。
6 结语
本文以基于证据理论的信息融合为背景,对时域证据融合方法進行了研究,通过定义记忆因子,构建优化模型来确定时序权重,以此将决策者的时序偏好融入时域证据融合,在此基础上提出了一种考虑决策者时序偏好的时域证据融合方法。对比分析表明,该方法对时域不确定信息中的冲突信息具有较好的处理能力,决策者对时序的不同偏好在融合结果中有明显体现,该方法较好地体现了时域证据融合的动态性特点,有效实现了客观不确定信息与决策者主观态度的有效融合。
参考文献 (References)
[1] KHALEGHI B, KHAMIS A, KARRAY F O, et al. Multisensor data fusion: a review of the state-of-the-art [J]. Information Fusion, 2013, 14(1): 28-44.
[2] DEMPSTER A P. Upper and lower probabilities induced by a multivalued mapping [J]. The Annals of Mathematical Statistics, 1967, 38(2): 325-329.
[3] SHAFER G. A Mathematical Theory of Evidence [M]. Princeton: Princeton University Press, 1976: 19-63.
[4] SARABI-JAMAB A, ARAABI B. How to decide when the sources of evidence are unreliable: a multi-criteria discounting approach in the Dempster-Shafer theory [J]. Information Sciences, 2018, 448/449: 233-248.
[5] YANG D, JI H B, GAO Y C. A robust D-S fusion algorithm for multi-target multi-sensor with higher reliability [J]. Information Fusion, 2019, 47: 32-44.
[6] PARK T J, CHANG J H. Dempster-Shafer theory for enhanced statistical model-based voice activity detection [J]. Computer Speech & Language, 2018, 47: 47-58.
[7] DENG X Y, JIANG W, WANG Z. Zero-sum polymatrix games with link uncertainty: a Dempster-Shafer theory solution [J]. Applied Mathematics and Computation, 2019, 340: 101-112.
[8] YAGER R R. Satisfying uncertain targets using measure generalized Dempster-Shafer belief structures [J]. Knowledge-Based Systems, 2018, 142: 1-6.
[9] YAGER R R. Fuzzy relations between Dempster-Shafer belief structures [J]. Knowledge-Based Systems, 2016, 105: 60-67.
[10] LIU Y T, PAL N R, MARATHE A R, et al. Weighted fuzzy Dempster-Shafer framework for multimodal information integration [J]. IEEE Transactions on Fuzzy Systems, 2018, 26(1): 338-352.
[11] 宋亞飞,王晓丹,雷蕾.基于直觉模糊集的时域证据组合方法研究[J].自动化学报,2016,42(9):1322-1338.(SONG Y F, WANG X D, LEI L. Combination of temporal evidence sources based on intuitionistic fuzzy sets [J]. Acta Automatica Sinica, 2016, 42(9): 1322-1338.)
[12] HONG L, LYNCH A. Recursive temporal-spatial information fusion with applications to target identification [J]. IEEE Transactions on Aerospace and Electronic Systems, 1993, 29(2): 435-445.
[13] 洪昭艺,高勋章,黎湘.基于DS理论的混合式时空域信息融合模型[J].信号处理,2011,27(1):14-19.(HONG Z Y, GAO X Z, LI X. Research on temporal-spatial information fusion model based on DS theory [J]. Signal Processing, 2011, 27(1): 14-19.)
[14] 刘永祥,朱玉鹏,黎湘,等.导弹防御系统中的目标综合识别模型[J].电子与信息学报,2006,28(4):638-642.(LIU Y X, ZHU Y P, LI X, et al. Integrated target discrimination model in missile defense system [J]. Journal of Electronics & Information Technology, 2006, 28(4): 638-642.)
[15] 吳俊,程咏梅,曲圣杰,等.基于三级信息融合结构的多平台多雷达目标识别算法[J].西北工业大学学报,2012,30(3):367-372.(WU J, CHENG Y M, QU S J, et al. An effective multi-platform multi-radar target identification algorithm based on three level fusion hierarchical structure [J]. Journal of Northwestern Polytechnical University, 2012, 30(3): 367-372.)
[16] FAN C L, SONG Y F, LEI L, et al. Evidence reasoning for temporal uncertain information based on relative reliability evaluation [J]. Expert Systems With Applications, 2018, 113: 264-276.
[17] SMETS P. The combination of evidence in transferable belief model [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1990, 12(5): 447-458.
[18] 宋亚飞,王晓丹,雷蕾,等.基于相关系数的证据冲突度量方法[J].通信学报,2014,35(5):95-100.(SONG Y F, WANG X D, LEI L, et al. Measurement of evidence conflict based on correlation coefficient [J]. Journal on Communications, 2014, 35(5): 95-100.)
[19] JOUSSELME A L, GRENIER D, BOSSE E. A new distance between two bodies of evidence [J]. Information Fusion, 2001, 2(2): 91-101.
[20] MURPHY C K. Combining belief functions when evidence conflicts [J]. Decision Support Systems, 2000, 29(1): 1-9.
[21] DENG Y, SHI W K, ZHU Z F, et al. Combining belief functions based on distance of evidence [J]. Decision Support Systems, 2004, 38(3): 489-493.
[22] ZHANG Z J, LIU T H, CHEN D, et al. Novel algorithm for identifying and fusing conflicting data in wireless sensor networks [J]. Sensors, 2014, 14(6): 9562-9581.
[23] YUAN K J, XIAO F Y, FEI L Q, et al. Conflict management based on belief function entropy in sensor fusion [J]. SpringerPlus, 2016, 5: 638-649.
