搜救抓取一体化无人机的方案设计
2019-08-27 03:27章东莞张扬田文强熊欣胡杨
科技创新与应用 2019年22期
关键词:图像
章东莞 张扬 田文强 熊欣 胡杨

摘 要:无人机由于其小型化、快速起降和无机载人员等特点,特别适用于搜索和灾害救援,该功能要求无人机通过机载设备在目标区域寻找,选定并抓取“目标物品”;然后携带“目标物品”放到指定区域。本设计所要完成的目标定位系统搭建是通过图传将获取的图像信息回传到地面站,然后电脑通过视频采集卡读取图像信息并结合操作者通过红外装置确定的预抓取平面,在处理后获得图像中“目标物品”的图像坐标,之后通过坐标转换,将图像坐标转换成“目标物品”在真实世界中的坐标;最后将坐标发送给抓取平台实现抓取。
关键词:搜救;图像;坐标转换;一字线红外激光器
中图分类号:V279 文献标志码:A 文章编号:2095-2945(2019)22-0105-03
Abstract: Due to its miniaturization, rapid take-off and landing, and inorganic personnel, the UAV is especially suitable for search and disaster rescue. This function requires the drone to search for the target area through airborne equipment, select and capture "target item"; then carry the "target item" to the designated area. The target positioning system to be completed by the design is to transmit the acquired image information to the ground station through the image transmission, and then the computer reads the image information through the video capture card and combines the pre-crawling plane determined by the operator through the infrared device to process.The image coordinates of the "target item" in the image are obtained; then the coordinate of the image is converted into the coordinates of the "target item" in the real world by coordinate conversion; finally, the coordinates are sent to the crawling platform to implement the grab.
Keywords: search and rescue; image; coordinate transformation; one-line infrared laser
引言
无人机在近些年已经从军事领域进军到民用行业中,在搜救、自然灾害监测、以及农业等领域已经有广泛应用。在无人机侦察搜救方面的应用比如火场救援,地震灾区搜救,以及航模搜救,基于无人机的高机动性都有着广阔的应用前景。然而当下国内对于无人机搜救抓取方面的研究尚不成熟,在哈尔滨工业大学NRSL实验室的研究成果中,无人机无需第三方设备的辅助,仅依靠自身的传感器和相机,实现对目标的识别,轨迹规划和抓取控制。目标识别和定位的还存在一些问题,其PID控制轨迹的效果并不是很好,在现实中单件应用起来成本高,还未具有成熟的使用价值。山西大同大学桥栋硕士的研究成果中谈及的铁丝网抓取方案虽然抓取面积大,但固定性不好,容易掉落。
1 基本原理
搜救抓取一体化无人机主要由数字定位系统,机械定位系统,红外辅助定位系统,主控系统和四旋翼系统五部分组成,为了实现搜救与抓取一体化,直接思路是在无人机上复合具有抓取功能的系统,而要完成抓取功能需要先实现定位的功能,为实现定位,可采用在四旋翼无人机的机架上搭载一个拍摄无人机下方的高清摄像头,通过该摄像头将包含目标的图像回传到操控者的图像显示系统,利用MATLAB进行图像处理,获得目标抓取点的二维平面坐标,再将其传入arduino 控制板上,通过设计机械定位机构使机械爪接收控制板發出的信号移动到对应目标正上方,至此就实现了定位的功能。通过设计可以伸缩并在不同高度闭合抓取的机械手从而实现目标物的抓取。特别的,对于图像中不同高度的目标点的拾取问题,可采用能在机架上上下移动的一字线激光源来辅助操作者确定目标物品的待抓取点在图像中的位置并同时把高度对应匹配上。这里采用的是半人工定位的方式,以实现经济性和灵活性。该系统的模型如图1所示。
2 数字定位系统
2.1 概述
搜救与抓取一体化无人机在人工控制下进行抓取动作时,因为抓取目标地点是未知的,所以需要将图像传入到人工控制平台处,由操作人员根据实时图像确定抓取目标位置。MATLAB有对图像进行数字化处理的功能,可以得到在MATLAB上某个像素点的位置,因此可以利用这个特点提前将无人机机架下方的若干个指定平面上每个点的位置与MATLAB上对应面上的对应点对应起来。当要抓取图像中的某个目标时,只需要人在MATLAB上拾取合适的像素点,就可以得到目标在机架下方某平面内的较为精确的位置。坐标数据传输的硬件连接示意图如图2所示。
2.2 不同高度坐标转换
由于需要建立摄像头捕捉的目标位置与实际坐标的关系并且要实现对不同高度目标物的抓取,所以需要在MATLAB上建立不同高度坐标转换关系式。
为了获得更大的视野,需将摄像头偏离轴线斜置约20度,然后对传输回来的图像进行桶型畸变矫正,这里采用空间坐标的前向映射法和双线性插值法相结合的方法。为了获取正确的目标坐标以及简化后续抓取运算步骤,需要进行一个透视变形以此建立一个虚拟救援平台。
在获取红外辅助定位系统所得到的高度值之后,即待抓取目标高度值,将以像素坐标系、图像物理坐标系、世界坐标系的坐标转换顺序从上位机发送正确的待抓取物的三维坐标值。坐标转换示意图如图3。
经过上述变换以后,所得到的(x2,y2)都是相对于图像中X1轴和Y1轴投影到地面中的X2轴Y2轴的距离。我们在实际中所使用的坐标系是以救援平台的角度转轴与地面的交点为坐标原点,角度转轴方向为Zw轴,XwYw平面在地面上的三维XwYwZw坐标系,因此还要进行一个坐标的平移。为了方便坐标的平移我们使用十字线红外激光作为辅助。十字线红外激光固定在救援平台的一脚上上下移动,这样就可以确定Xw轴和Yw轴的位置。由此就可以算出需要进行平移的量,再给不同象限的值加上相应的正负号,就可以得到真实的坐标值。
3 机械定位系统
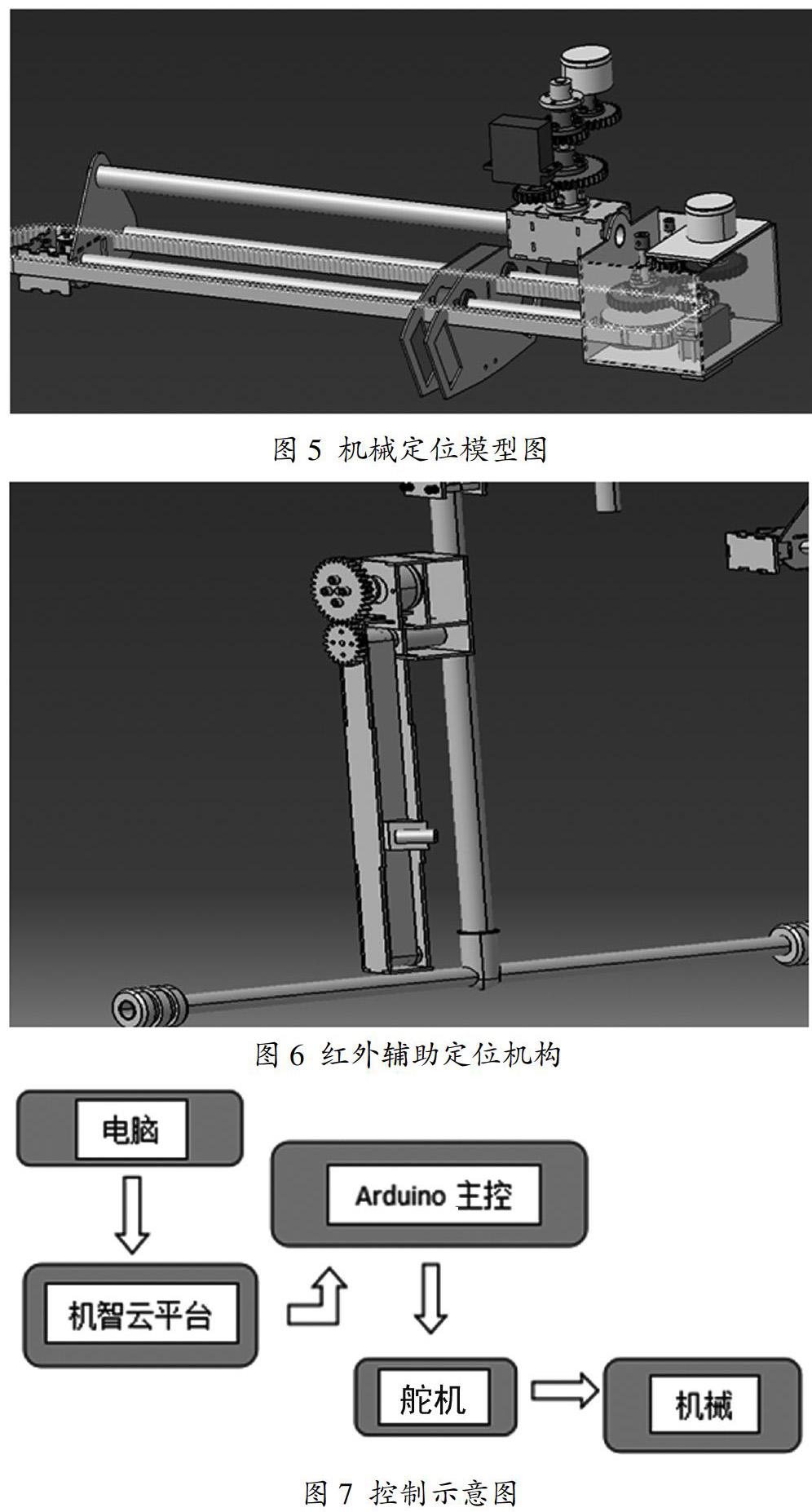
搜救与抓取一体化无人机在人工控制下进行搜救与抓取动作时,因为需要抓取物的精确位置并不是已知的,所以不能进行点对点抓取,只能在人工控制下到达目标正上方一定范围内。所以,有必要设计出能够将机械爪移动到目标正上方的机械结构。而这个结构要能够受主板控制系统控制,到达主板指定位置。可以采用极坐标系定位,用一个360度舵机控制机械爪的顶部移动,使用角位移传感器实现对舵机输出量的控制,另用一个360度舵机,用同步带及带轮连接的方式实现转动量转化为直线位移量。机械定位模型图如图5所示。
4 红外辅助定位系统
在机架的一个脚上装上一个可以上下滑动的同步皮带,在皮带上装上一字线激光器,转动皮带的同步带轮的转动由360度小舵机来实现并且用电位器来实现对高度的反馈,该360度舵机由操控者来直接操控,一字线激光辅助操控者判断想要抓取物体部分的高度,实现对目标物的不同高度部位的抓取。结构设计如图6所示。
5 主控系统
通过获得目标在图像中的像素坐标以后,还需进行坐标转换以获得目标的世界坐标。然后将目标在笛卡尔坐标系中的坐标转化为极坐标系中的坐标,一系列转换以后MATLAB会将坐标通过串口发送给地面站的arduino控制板,然后再通过无线模块发送给救援平台上的控制板从而实现抓取。控制示意图如图 7所示。
6 结论
(1)本文基于MATLAB软件以及无限终端设备建立了一套可行的搜救抓取一体化无人机方案:通过高清摄像头将包含目标的图像回传到操控者的图像显示系统,利用MATLAB进行数字图像处理获得目标抓取点的二维平面坐标,再将其传入控制芯片上,通过设计机械定位机构使机械爪移动到对应目标正上方实现抓取。
(2)为了实现可以抓取不同高度,不同形状的立体的目标物,本文设计采用一字线激光源来辅助操作者确定目标物品的待抓取点在图像中的位置能够与相应高度的平面对应起来,采用可以在不同高度闭合抓取的机械手从而实现目标物的抓取。
(3)该方案仍有些许不足,对操作者有一定要求,并且无人机需要降落在平坦的地面上,抓取精度也不是很高。
参考文献:
[1]乔栋,薛彩梁.某空中飞行器抓取装置结构优化设计[D].山西大同大学,2016.
[2]都业贵.基于视觉伺服的飞行机械臂抓取控制[D].哈尔滨工业大学,2016.
[3]张蕾.國外无人机发展趋势及关键技术[J].电讯技术,2009,49(07):88-92.
[4]曹志伟.无人机技术研究现状和发展趋势[J].民营科技,2017(04):57.
[5]潘炼.传感器原理及应用[M].电子工业出版社,2012.
[6]王祁.传感器信息处理及应用[M].科学出版社,2012.
[7]高宏.基于Pro/E的三自由度机械臂末端执行曲线轨迹匀速运动的仿真与实现[J].现代制造工艺设备,2014(4).
[8]沈洪星.单/多四旋翼无人机系统平台的设计及若干应用的研究[D].浙江大学,2016.
[9]高珍,邓甲昊,孙骥,等.微型无人机图像无线传输系统的发展现状及其关键技术[J].科技导报,2007,25(16):68-72.
[10]刘亚强,陈文艺.桶形畸变图像的一种校正方法[J].西安邮电大学学报,2012,17(2):27-30.
猜你喜欢
读者(2019年23期)2019-11-15
小猕猴智力画刊(2019年12期)2019-01-08
初中生世界·九年级(2018年12期)2018-12-22
电子技术与软件工程(2016年23期)2017-03-06
读者(2015年9期)2015-05-04
南方周末(2014-03-27)2014-03-27
初中生世界·八年级(2014年2期)2014-03-15
智慧与创想(2013年5期)2013-06-25
意林(2011年10期)2011-05-14