
面向室内停车场的自主代客泊车关键技术研究
2019-08-27 00:40华一丁李鑫慧唐风敏
汽车电器 2019年8期
张 微,华一丁,臧 晨,李鑫慧, 唐风敏,郭 蓬
(1.工业和信息化部装备工业发展中心,北京 100001;2.中汽研 (天津)汽车工程研究院有限公司,天津 300300;3.中国汽车技术研究中心有限公司,天津 300300)
1 概述
随着汽车保有量的增加,城市交通资源逐渐紧张,停车位空间越来越小,停车难度越来越大,在停车过程中出现交通事故的概率也在逐渐增加,为了降低在泊车过程中发生交通事故的概率,2010年美国要求车辆必须安装倒车影像系统[1]。随着车辆电动化以及EPS技术、CCS技术、车辆线控技术、自动驾驶技术的发展,车辆完全可以在不依赖驾驶员的条件下进行一系列包括转向、制动、油门控制、挡位转换在内的操作。自主代客泊车系统是一种通过激光雷达、摄像头、毫米波雷达等车载传感器进行车辆周围环境感知,车载计算单元进行数据处理、行为决策、路径规划,最后执行单元控制车辆低速自动驾驶至停车位的L3级智能驾驶系统,该系统一般由车辆定位单元、环境感知单元、路径规划单元、轨迹跟踪控制单元4部分构成,可实现“最后一公里”无人驾驶任务,有效解决停车难、停车效率低等问题。
2 自主代客泊车研究现状
2.1 国外自主泊车研究现状
2013年法雷奥发布了名为ValetPark4U的自动泊车辅助系统,该系统选用激光雷达、超声波雷达、摄像头等硬件传感器方案,可以完成自动探测停车位、自动泊车入位等功能。驾驶员通过手机APP软件激活ValetPark4U系统,则可以在特定区域实现停/取车操作。
2015大陆开发并展示了基于360度全景相机的自动泊车系统。Demo车分别在前护栅、车尾、后视镜底座上安装了4个鱼眼相机,通过图像拼接技术对车辆周围图像画面进行全景拼接。通过对全景图像的算法处理,识别并显示出图像中的停车位,驾驶员选择目标停车位并点击自动泊车,车辆即可在驾驶员无任何操作的前提下完成泊车入位。
2017年,戴姆勒和博世合作研发了具有自主代客泊车技术的智能网联车辆。如图1所示,该系统方案对车辆的改造较少,主要将传感器设备布置在场端,停车场端激光雷达将检测到的障碍物数据通过云端平台发送至车端,车辆再进行相应的处理。

图1 戴姆勒-博世代客泊车技术方案
2018年,大众集团在德国汉堡机场测试车辆一键叫/还车功能,一辆大众测试车辆在没有驾驶员指导的情况下驶入车位,同时,在多层停车场安装简单的图示标志,该车辆同样可以完成泊车任务。大众计划在2020年为大众、奥迪、保时捷等配置自主泊车功能。
2.2 国内自主泊车研究现状
2017年11月30日,纵目科技演示了针对停车场环境的低速场景自主泊车Demo系统。在取车环节中,驾驶员通过手机App发送取车请求,车辆在接收到手机发出的请求指令后启动车辆并控制车辆自动驾驶至特定区域。在泊车环节中,用户到达下车区域后,通过手机APP请求泊车操作,车辆在接收到泊车请求后,自动驶入停车位完成泊车任务。
2018年1月,采埃孚、百度和盼达研发的自主泊车系统在重庆共享汽车自动驾驶示范园区运行。该系统将视觉图像信息和超声波测距信息进行深度融合,并结合融合的规则式和深度学习系统,保障驾驶员与行人的安全。
北汽计划从2019年下半年开始,将实现大部分车型搭载自动泊车系统。
目前,无论国内还是国外,自主代客泊车系统均是各大主机厂、TIER1及造车新势力的重点研发领域及技术突破方向,但无论哪种技术方案,目前更多处于Demo系统阶段,同时,在技术方面,室内定位精度及实时性难以保证,各自算法的可移植性相对较差,无法在市场上普遍推广。
3 自主代客泊车关键技术
3.1 室内定位技术
不同于室外GPS良好的环境,面向室内停车场的代客泊车的实现需要室内高精度定位技术的支持。目前针对代客泊车室内定位实现主要分为3种方法:激光SLAM、视觉SLAM、UWB。
1)激光SLAM即“同步定位与地图构建”,主要用于解决在未知位置环境中的建图与定位问题[2]。通过比较不同时刻采集到的3D激光雷达物体点云信息的匹配和对比,从而计算出激光雷达的本体相对位置和姿态变换,通过坐标转换得到车体的位置和姿态变化,进而实现无人车的定位问题。为提高室内定位精度,常采用与惯导传感器融合的方案实现无人车室内高精度的定位需求。目前,激光雷达SLAM的定位技术相对成熟,但是测量距离受到Lidar探距离限制,同时在安装上有一定的结构要求。
2)近年来图像处理技术得到了快速发展,因为信息量大、适应范围广等优点使视觉SLAM得到了广泛关注。视觉SLAM选用深度相机或单目、鱼眼相机作为传感器,利用多帧图像来估计自身的位置变化,从而实现自身的定位。图像处理数据量巨大,需要较强的计算单元,同时视觉传感器受光线条件限制而无法在黑暗环境中正常工作。
3)UWB超宽带技术是近年来发展起来的一种无线电技术[3]。UWB的定位原理和卫星导航定位原理相似,首先在室内布置多个UWB定位基站并测量基站的坐标作为已知量,在无人驾驶车上安装移动基站,移动基站按照一定的频率发射脉冲,不断和已知位置的基站进行测距,通过TDOA算法精确地求解出移动站的精确坐标,从而实现无人车自身的定位。UWB超宽带定位方法可实现室内厘米级的定位精度,同时不需要对车辆进行复杂的结构改造,但是UWB需要在停车场安装大量的基站,硬件成本较高。
3.2 横纵向控制技术
考虑到停车场地形因素,在车辆实现泊车过程中会出现较多转弯和坡道情况,对横向控制和纵向控制提出了更为严格的要求。
横纵向控制技术主要是通过控制目标车辆的转向系统和驱动/制动系统从而实现车辆沿着预定路径行驶[4]。基于最优预瞄理论的轨迹纯跟踪控制方法,通过建立车辆当前位置与预瞄点期望位置的误差与方向盘转角之间的函数关系,从而得到方向盘转角的期望值,实现车辆的横向控制。该函数关系建立在车辆的几何运动学模型之上在低速应用场景得到了广泛的应用。横向跟踪控制模型结构示意如图2所示。
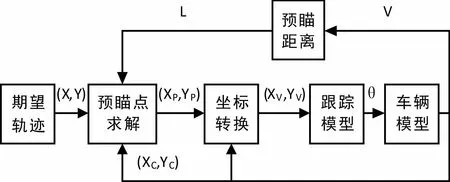
图2 横向跟踪控制模型结构示意图
如图2所示,横向跟踪算法由预瞄点求解、坐标转换、跟踪模型、车辆模型、预瞄距离5部分组成。其中,预瞄距离L的求取可根据当前车速v求得;根据预瞄距离L、车辆坐标 (Xc,Yc)、期望轨迹 (X,Y) 求取预瞄点 (Xp,Yp);坐标转换则将大地坐标系下的预瞄点 (Xp,Yp)转换到车体坐标系下;跟踪模型根据预瞄点和车辆运动学模型求解出车辆方向盘转角θ。
纵向跟踪控制主要研究车辆行驶过程中车辆的实际速度跟踪期望速度的控制过程。车辆纵向跟踪控制可分为速度决策模块和速度跟踪控制模块,图3为自动驾驶纵向跟踪控制模型结构示意图。

图3 纵向跟踪控制模型结构示意图
如图3所示,纵向跟踪控制算法由车速决策模块、车速控制模块、车辆模型3部分组成。车速决策模块根据当前车速vc、当前道路曲率ρc、车辆当前位置 (Xc,Yc) 以及期望轨迹的位置 (X,Y)和曲率ρ求解出车辆的期望速度,车辆控制模块根据当前速度vc和期望车速v求解出车辆的制动压力Bp和油门开度Bo。
3.3 环境感知技术
自动泊车实现在停车位旁泊车入位的功能属于L2级自动驾驶,自主代客泊车在前者的基础上增加了从停车场入口到停车位这段距离,属于L3级无人驾驶。目前环境感知的方案分为车辆车载端感知方案和停车场场端感知方案2种。
1)车端感知方案
车端感知方案将相应的传感器安装在无人驾驶车上,场端无需安装更多的传感器[5]。通过车端传感器实现车辆、行人等障碍物检测等环境感知的任务。
2)场端感知方案
场端感知方案则将感知的任务交给停车场端,通过在停车场端安装激光雷达、摄像头等传感器实时检测、定位停车场内的车辆、行人等并将检测得到的结果发送至云端,再从云端发送到车端。场端感知方案的实现可大幅减少对车辆的改造工作和成本。
3.4 路径规划技术
3.4.1 全局路径规划策略
全局路径规划算法根据已构建的室内高精度地图规划自主泊车全局路径,在自动驾驶汽车行驶前,给出下车点和停车场停车位坐标,规划出一条车辆可以行驶的最优路径。Dijkstra是常用的全局路径规划算法,全局路径规划算法流程如图4所示。
3.4.2 局部路径规划策略
在实现代客泊车的过程中,无人驾驶车沿着特定的轨迹行走,当遇到行人或车辆时会根据不同的场景进行相应的路径规划。
1)当前方有行驶车辆时。当车辆上搭载的毫米波雷达以及摄像头探测到车辆前方有行驶的车辆时,本车辆会选择跟车的决策,具体场景如图5所示。
2)当前方有静止车辆时。当车辆上搭载的毫米波雷达以及摄像头探测到车辆前方有静止的车辆,并且相邻车道没有车辆干扰时,车辆将会绕开前方静止车辆,并继续行驶到所设停车位,具体场景如图6所示。
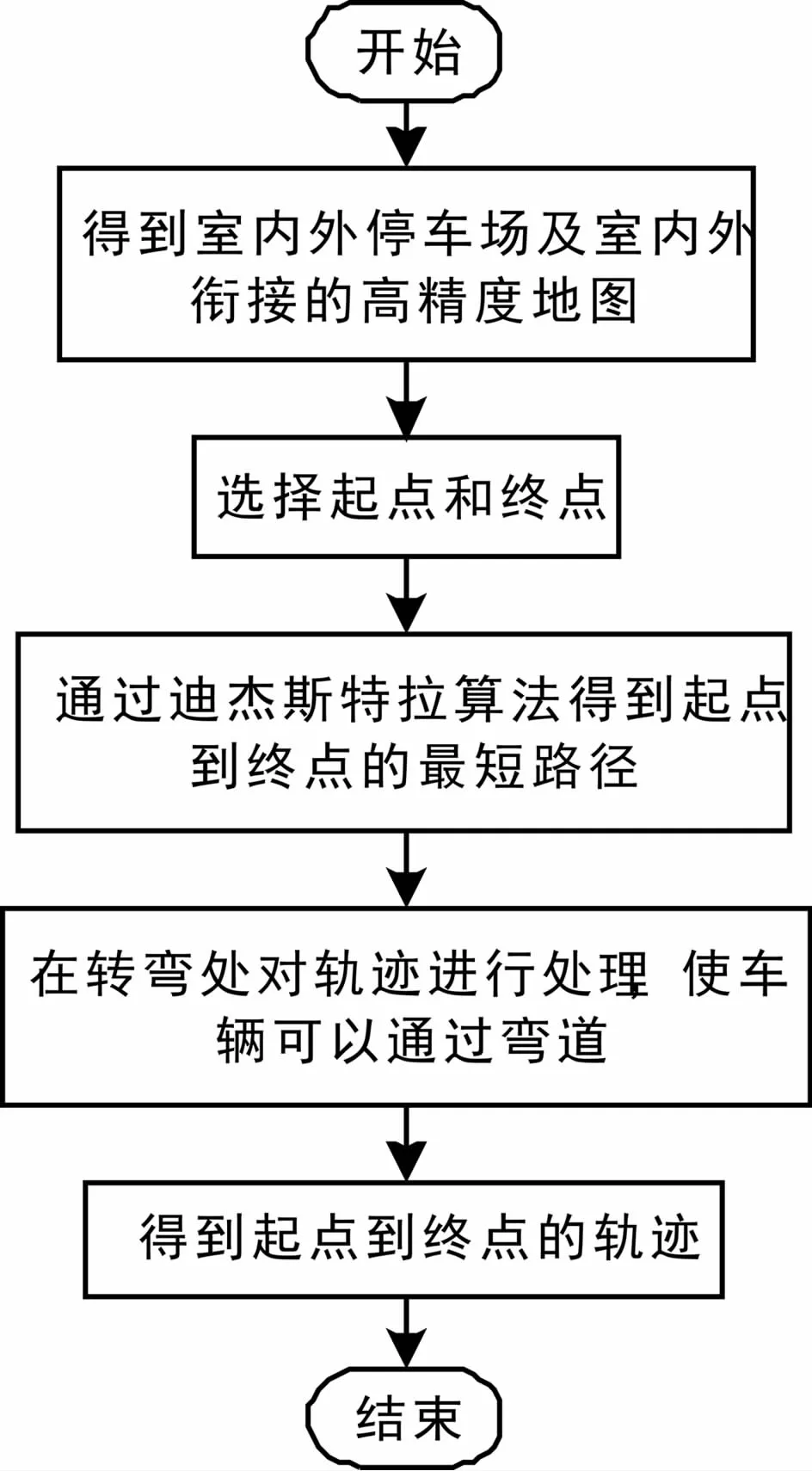
图4 全局路径规划流程
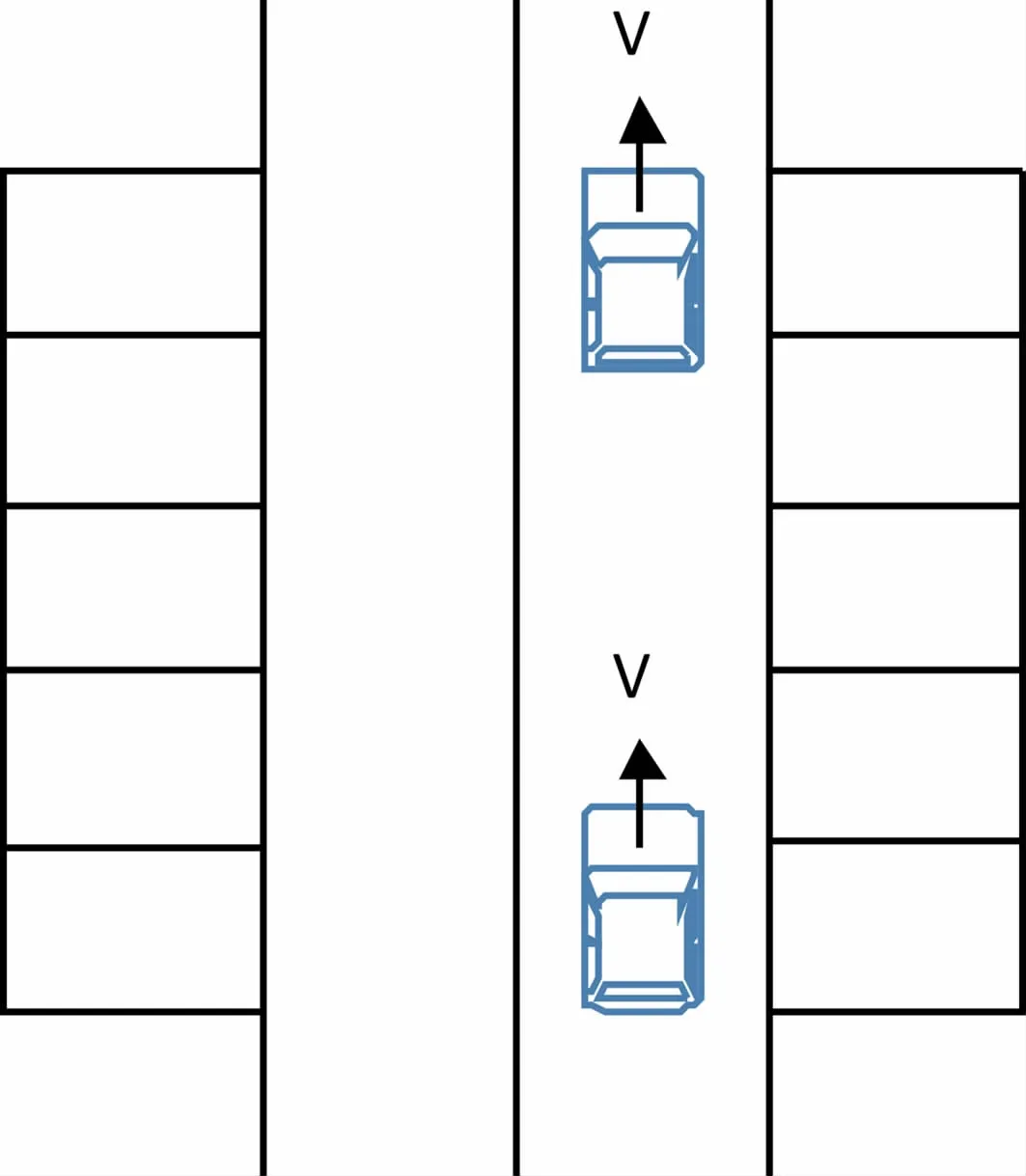
图5 当前方有行驶车辆时
3)当前方有行人时。当车辆上搭载的毫米波雷达以及摄像头探测到车辆前方有行人时,车辆将会跟随行人,以保证行人安全,具体场景如图7所示。
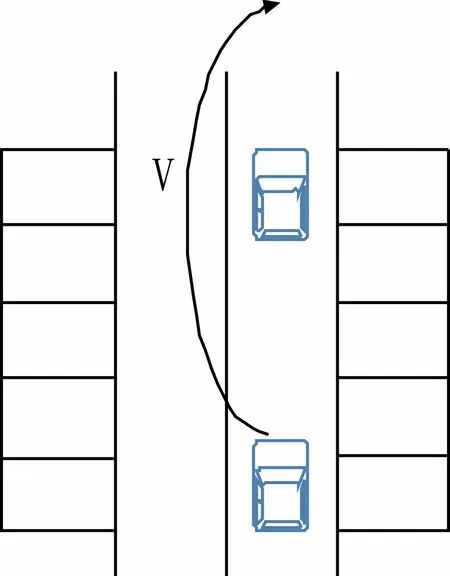
图6 当前方有静止车辆时

图7 当前方有行人时
4)当车辆前方突然出现障碍物时 (包括其他车辆从停车位驶出以及突然出现行人时)。当车辆上搭载的激光雷达探测到前方突然出现障碍物时,车辆将会紧急制动,根据前方障碍物的运动变化选择避障方式,具体场景如图8所示。

图8 当车辆前方突然出现障碍物时
4 结束语
随着自动驾驶和智能网联汽车行业的发展,自主代客泊车关键技术也将日趋成熟,自主代客泊车将成为自动驾驶最早的商业化落地应用场景,给用户带来极大的便利。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
农业工程学报(2022年4期)2022-04-24
汽车实用技术(2022年7期)2022-04-20
证券市场红周刊(2021年42期)2021-10-30
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
中国外汇(2020年9期)2020-08-11
汽车工程(2019年12期)2020-01-10
课堂内外·创新作文高中版(2018年6期)2018-07-06
