基于驾驶员经验的自动泊车规划算法研究*
2020-01-10 01:39谭运生康龙云于宗光
汽车工程 2019年12期
胡 文,谭运生,康龙云,于宗光
(1.华南理工大学电力学院,广州 510640; 2.领途汽车有限公司智能驾驶开发部,无锡 214000;3.中国电子科技集团公司第五十八研究所,无锡 214000)
前言
近年来,随着汽车保有量的增加,停车空间越来越小,对驾驶员的操作要求也越来越高,对于经验不足的驾驶员来说,很难轻松地将车泊入拥挤的停车位中。基于这些因素,自动泊车技术得以发展,很多国内外学者开始对其进行研究。
目前,在自动泊车技术领域,国内外学者的研究主要集中在两个方面:(1)路径规划和路径跟踪,首先借助传感器获取泊车可行驶区域,并结合车辆的几何参数,预先规划出一条理想的泊车轨迹,然后设计各种控制器跟踪该泊车轨迹[1-3];(2)利用先进的控制算法模拟驾驶员操作,分析驾驶员在泊车时用到的经验知识,采用模糊控制、神经网络等先进控制算法[4-6],进行模拟建模以实现自动泊车。但是,这些算法过于复杂[3-8],满足不了系统的实时性要求,不利于实际应用。其中,虽然有些算法简单易行,但容易出现曲率不连续问题[9-10]。此外,部分算法[11-13]解决了曲率不连续的问题,但在路径跟踪过程中,需要反馈,计算量较大,对系统的实时性要求高。本文中在考虑算法实时性要求的基础上,借鉴熟练驾驶员的泊车经验,提出了一种简单易行的自动泊车规划算法。
1 问题描述与泊车分析
1.1 问题描述
泊车路径曲率不连续会导致汽车停车原地转向,容易造成轮胎磨损问题。而导致路径曲率不连续问题的原因,大多是在路径规划过程中没有考虑转向盘转向的连续性。本文中在解决该问题时,借鉴熟练驾驶员的泊车经验,对经验驾驶员的泊车过程进行机理分析,并在分析成果的基础上,对该过程进行建模。
1.2 泊车分析
在平行车位的泊车入库过程中,熟练驾驶员的泊车过程可分为6段,即S0、S1、S2、S3、S4、S5,如图1所示,其中,T0、T1、T2、T3、T4为各段之间的连接点。S0段:将车辆行驶至泊车起始点T0,其路径可为直线或曲线,视工况而定;S1段:将车速控制在最小稳定车速vmin,并将转向盘以最大角速度匀速向右打满;S2段:转向盘停留在最右端的位置,提升车速至最大泊车车速vpmax(以减小泊车时间),车辆以最小转弯半径做圆周运动,直至到达一定位置(即点T2);S3段:降低车速至最小稳定车速vmin,并以最大角速度反方向匀速打满转向盘;S4段:转向盘停留在最左端的位置,提升车速至最大泊车车速vpmax,车辆以最小转弯半径做圆周运动,直至方向角回零;S5段:转向盘快速回正,车辆以最小稳定车速vmin前向、后向行驶,同时适当操作转向盘,将车辆调整至合适的位置与方位。由于本文研究的重点在于泊车入库过程,S0准备阶段和S5回正调整阶段将不对其进行研究。

图1 泊车过程
本文中在参考上述泊车过程的基础上,建立如图2所示的自动泊车控制系统框图。其中,环境信息为环境感知提供的车位信息、可行驶区域信息、车辆位置信息等;泊车控制器根据感知环节提供的环境信息进行自动泊车控制,输出期望转向盘转向角θd和期望车速vd;转向控制器为车辆线控转向控制器,可有效控制转向盘达到目标转向角;速度控制器为车辆速度控制器,通过控制加速和减速使车速稳定在目标车速附近。由于在泊车过程中车速不超过5 km/h,车辆速度较低,可以通过车辆自身的控制器实现目标控制,满足期望的转向盘转向角和车辆速度要求。因此,本文重点在于设计泊车控制器,输入环境信息,输出期望转向盘转向角和期望车速,对速度控制器和转向控制器将不做进一步研究。
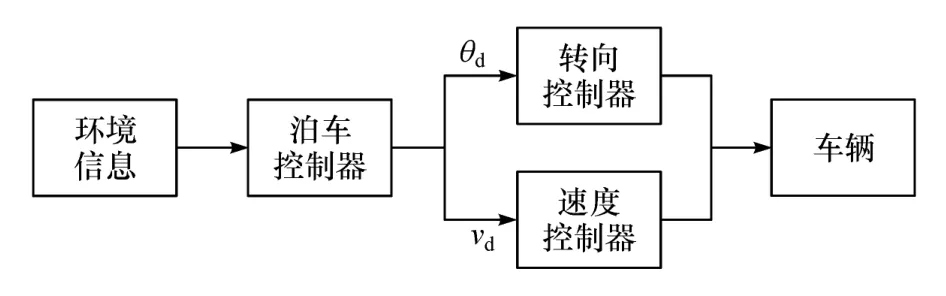
图2 自动泊车控制系统框图
2 控制器建模
如图3所示,去掉S0准备阶段和S5回正结束阶段的泊车过程。其中,LP和WP分别为泊车位长宽;R1和R2分别为S4和S2曲线半径;θ为S4对应的圆周角,也是T3点对应的车辆方向角;ψT为O2T1与纵轴的夹角;Lv和Wv分别为车辆的长宽;L和W分别为车辆的轴距和轮距;Lf和Lr分别为车辆的前悬长和后悬长;Rmin为车辆后轴中点的最小转弯半径。车辆在T0点时的泊车起始位置由后保险杠与泊车位沿x方向的距离D1和车辆右平面与泊车位沿y方向的距离D2确定(见图3)。
由于S2和S4段为转向盘打满后的转向过程,车辆的转弯半径为最小转弯半径。最小转弯半径为:(1)在满足泊车车位最小的情况下,S4段需满足最小转弯半径[14];(2)在R1取最小值的情况下,R2取值较大时,将使泊车可行区域(D2取值范围)变小,而在Rmin值附近的泊车可行区域最大;(3)从控制难度和精度考虑,R2取最小值(即转向盘打满)的控制难度较低、控制精度较高。
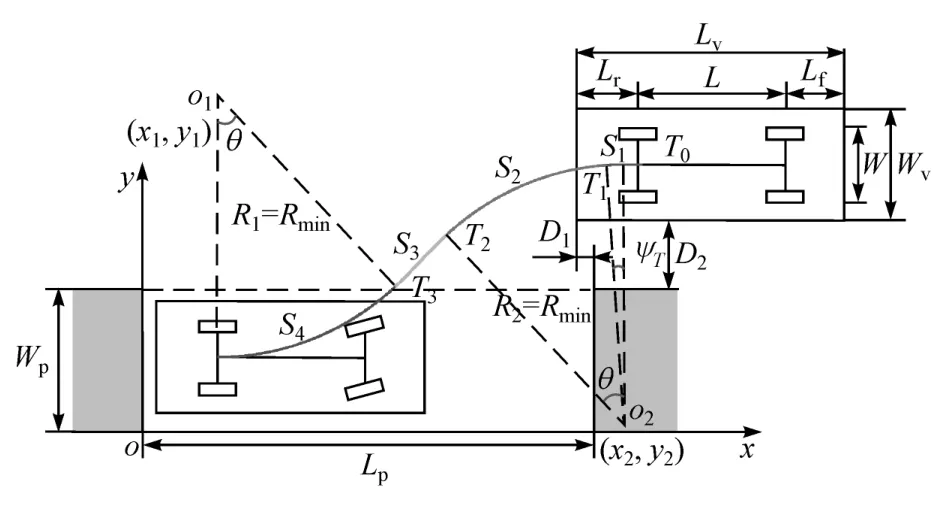
图3 泊车路径规划
S1段为转向盘回正到右打满的过程,S3段为转向盘右打满到左打满的过程,在实际操作过程中可将其看成转向盘匀速转向过程,转向速度为最大角速度。由于S2和S4段转向盘打满不动,车辆行驶轨迹固定,与车速无关。因此,可将S2和S4段的泊车车速提高,以降低泊车时间;而S1和S3段转向盘需要转向,泊车轨迹受车速和转向盘转向影响,为控制泊车精度,可将S1和S3段的泊车车速降低至最小稳定车速。
2.1 转向控制
2.1.1 S1段建模
S1段为转向盘从回正到打满的过程,对S1段的路径进行分析,如图4所示。其中,车辆后轴中心点的起始位置为图示坐标的原点T0,车辆起始方向角为零,并与T0X轴重合;S1为车辆行驶轨迹;T1为轨迹终点;T1Tx为轨迹终点的切线;ψS为T0T1与T0X的夹角;ψT为T1Tx与T0X的夹角,也是车辆方向角。
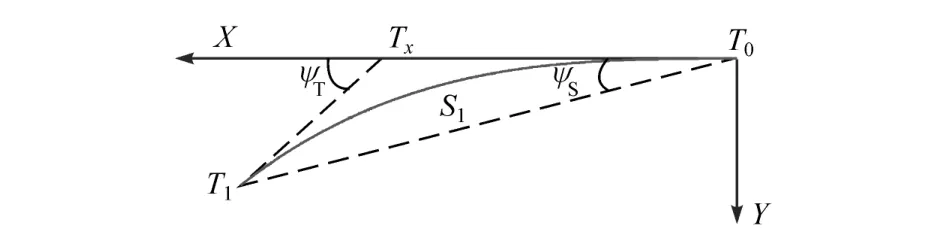
图4 S1段路径轨迹
由车辆运动学关系可得

式中:ψv为车辆横摆角;δf为等效前轮转向角;v为车速;ω为等效前轮转动角速度,可由转向盘角速度ωs和传动比i获取,即ω=iωs,而与相对应的转向盘转角ηd=i·δf。
由式(1)可得
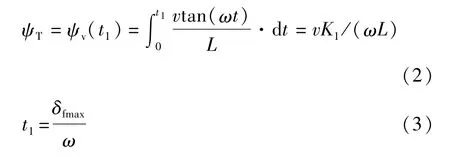
式中:K1=-log(cos(ωt1))=-log(cos(δfmax)),K1取值不随时间改变;t1为转向结束时间。
由于泊车过程的速度较低、转向盘转速较快,可在1 s内完成转向盘打满过程,此时的ψv取值较小(在0.05~0.25之间)。因此,可将泊车轨迹S1简化成直线T0T1,sinψv可简化成ψv,同时,泊车轨迹S1可通过车速v乘以时间t1计算,由此可得
由于K1和K2只与δfmax有关,为降低实际应用中的计算量,提升实时性,可根据δfmax预先计算K1和K2的值。
2.1.2 S3段建模
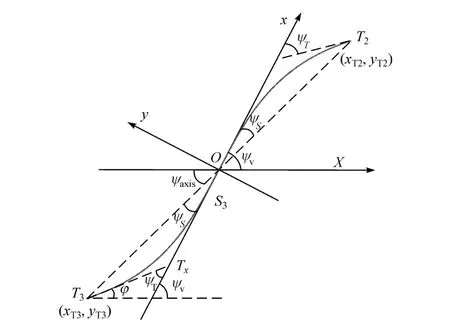
图5 S3段路径轨迹
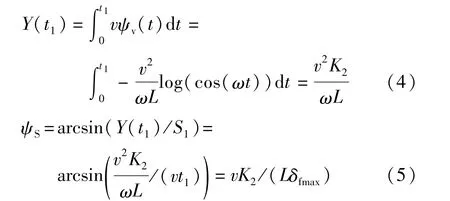
S3段路径轨迹如图5所示。其中,OX为水平轴,O点为转向盘回正时的坐标点;Ox轴为转向盘回正时的车辆方向,也是S3曲线过O点的切线;T2为轨迹起点;T3为轨迹终点;ψv为车辆在O点时的方向角;ψS为T2T3与Ox的夹角;ψT为过T2和T3点的切线T3Tx与Ox的夹角;φ为过T2或T3点的切线与水平方向的夹角,也是车辆在T2和T3点的方向角;ψaxis为T2T3与Ox的夹角。
由于S3段为转向盘从右打满到左打满的过程,OT2曲线与OT3曲线关于O点点对称,而S3段的前半段可视为S1段的反过程,也即S3曲线的前半段OT2曲线实际上与S1曲线呈镜面对称,因此S3弧长等于S1弧长的两倍。与S1曲线同理,可将S3曲线简化成T2T3直线。同时,基于上述简化条件,可假定ψT和ψS与S1曲线中的值相等,即可由式(2)和式(5)获得。其它需满足的几何关系如下:
2.1.3 S2段和S4段建模
由前面的叙述和分析可知,S2段曲线为以Rmin为半径的圆弧,如图3所示。因此本节重点须要确定的是本段中车辆的圆周运动应持续的时间,即求车辆到达本段终点T2的时机或位置,为此,取S2弧线在点T2的半径线与纵坐标的夹角θ为待求的变量。
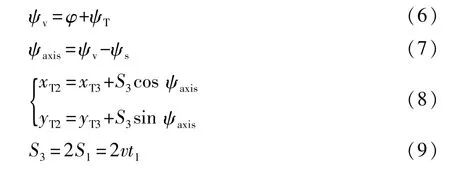
由几何关系可得
结合式(6)~式(13),可得

在车辆的速度v和转向盘角速度ωs固定的情况,式(13)中的S1、ψT和ψS为固定值,在D2已知的情况下,可由式(14)求得θ值。借助Mathematica软件的推导可得
由于ψT和ψS数值较小,式(15)中的sinψS≈ψS,sin(ψT-ψS)≈ψT-ψS、cos(ψT-ψS)≈1,式(15)可进一步简化为

至于S4段,它与S2段类似,不再存在待求的未知量,在此无须赘述。
2.1.4 路径约束
现对车辆在泊车过程中可能发生的碰撞情况进行分析,如图6所示,为保证泊车过程中的安全,设定一些安全距离:Df,Dr,Di,Do和Drb。
(1)根据汽车车身顶点D的碰撞分析,可确定泊车位的宽度WP。如图6所示,在S4段的D点圆弧半径为


图6 泊车路径约束示意图
车位宽度WP为

式中WPmin为最小车位宽度。
(2)根据汽车车身顶点C的碰撞分析,可确定泊车位的长度LP。如图6所示,在S4段的C点圆弧半径为

车位长度LP为

式中LPmin为最小车位长度。
(3)根据汽车车身顶点B与泊车位另一侧障碍物的碰撞分析,可确定泊车空间所需的宽度H。由于S1段的侧向位移较小,为方便计算,对B点的运动轨迹进行简化,如图6所示,简化后的B点圆弧半径为

泊车空间宽度H为

式中Hmin为泊车空间宽度。
(4)车辆在S2段的泊车过程中,可能会与泊车位顶点B′发生碰撞,最可能的碰撞点为车身E点,E点为后轴延长线与车身侧边的交点。如图6所示,只有在O2点的坐标x2>LP时,才会发生碰撞,因此可得以下几何关系:
式中:DEB为E点至B′点的安全距离;K4为圆心O1与O2的距离。结合图7中的几何关系可得


图7 圆心O1与O2距离示意图
2.1.5 泊车位置
在泊车信息已知的情况下,可根据上节中的路径约束条件,计算得到泊车起始位置D1和D2的范围。
由于在泊车转向过程中的车速v和转向角速度ωs事前设定,S1、ψT和ψS可提前求得,而R1和R2采用最小半径Rmin。因此,可由式(22)求得D2的最大值:

由式(23)~式(26)求得D2的最小值:
其中,上式中的O1点坐标(x1,y1)可由图6所示的几何关系得到

而当x2<LP时,车辆侧向CD边应与车位边A′B′保持DEB的安全距离,即

结合式(28)和式(31)可得D2的最小值:

在D2已知的情况下,可以根据式(23)和式(24)求得D1的情况:

此外,后轴的最小转弯半径Rmin和前轮等效转角δfmax可由车辆几何关系求得

对于熟练驾驶员来说,在泊车之前会将车停在熟悉的泊车区域,即由D1和D2确定的区域。而大多数驾驶员的侧向区域D2的范围为0.4~1.0 m,这是由于侧向距离D2较小可以缩短停车时间,同时,也方便给另一侧留有更多的可行空间,便于他人行走。为此,在实际应用中,当泊车系统自动寻找车位时,可将车停在靠近车位的位置,即D2的可行区域为0.5~1.0 m范围内。
2.2 速度控制
参考熟练驾驶员的驾驶经验,在车辆转向盘转动的过程中,将车速控制在最小稳定车速vmin;在转向盘稳定过程中,将车速提升至最高泊车车速vmax,一般在5 km/h左右。为此可得如图8所示的车速控制过程。
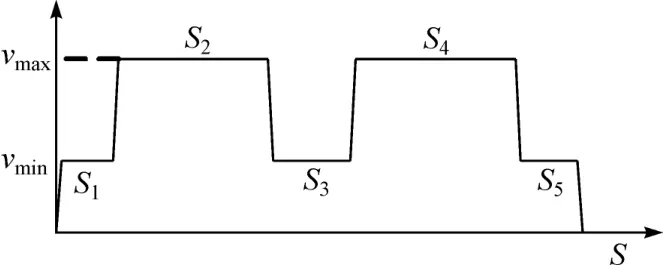
图8 车速控制过程
2.3 控制流程
上文对泊车控制的转向控制和速度控制进行了分析,现将泊车控制器的整个控制流程进行归纳。其中,由于车辆的几何参数、最小稳定车速vmin、转向盘最大稳定转速已知且安全距离预先设定,由此可计算得到S1、ψT、ψS、K1、K2、K4和K5等信息,泊车控制器可预存这些控制信息,便于减少重复计算量。
泊车前的参考计算过程如下:
(1)首先将车辆停在D2可行区域内,同时,感知系统进行泊车空间探测;
(2)判断泊车空间是否满足LPmin和WPmin,不满足则提示信息并退出泊车过程;
(3)判断泊车位置是否满足D2min和D2max,不满足则提示信息并退出泊车过程;
(4)根据D2计算θ、D1和T2的横坐标xT2。
3 仿真结果
为验证泊车算法的可行性,本文中以天津一汽夏利N5车型为例,利用Matlab/Simnlink建立本文提出的规划算法,并结合泊车过程中的极限和正常工况,对算法进行验证,参数如表1所示。选择车位尺寸LP×WP为7 m×2.4 m,道路宽度H为4 m,车辆的最低稳定车速vmin为2km/h,最大泊车车速vpmax为5 km/h。不同车辆的最低稳定车速和最大泊车车速有所不同,可根据实际情况标定获得,这里仅作参考。根据车辆相对车位的不同侧向距离D2,选择3种泊车情况进行分析。
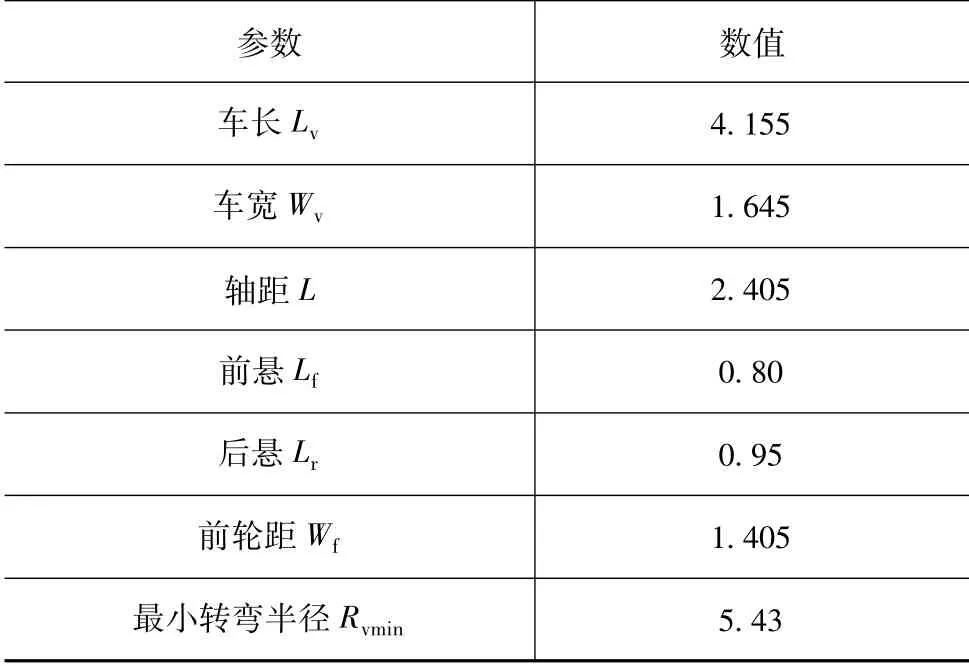
表1 乘用车与泊车有关的主要参数 m
为显性验证控制器满足碰撞约束条件的有效性,现将各安全距离均设为0,进行研究分析。如图9所示,在泊车侧向距离D2取最小值时,在泊车过程中,车辆侧向与车位之间的最小间隙DEB为0.003 m,车辆后侧与车位之间的最小间隙Dr为-0.003 m。造成误差的原因在于为提高实时性,对算法进行了部分简化处理。同时,如图10所示,在泊车侧向距离D2取最大值时,在泊车过程中,车辆侧向与障碍物之间的最小间隙Drb几乎为0。由此可见,本文中设计的泊车控制器误差非常小,能对车辆进行精确无误的控制。

图9 D2为D min的仿真结果

图10 D2为D max的仿真结果
此外,为结合实际泊车过程中的情况,将算法中的安全距离Df、Dr、Di、Do、Drb和DEB设为0.2 m,将Dr设为0.4 m,确保泊车安全并再次进行仿真分析。如图11所示,本文中设计的泊车控制器能使车辆精确、无碰撞地泊在设计的泊车终点区域内,且能获得比较理想的泊车效果。同时,如图12所示,转向盘在转向过程中,车速控制在2 km/h;转向盘打满后,车速迅速提升至5 km/h;整个泊车过程时间不足7 s。由此可见,本文中设计的控制器与熟练驾驶员的驾驶经验一致,在对车速进行变速控制的同时,既满足了精度需求,又有效控制了泊车时间。
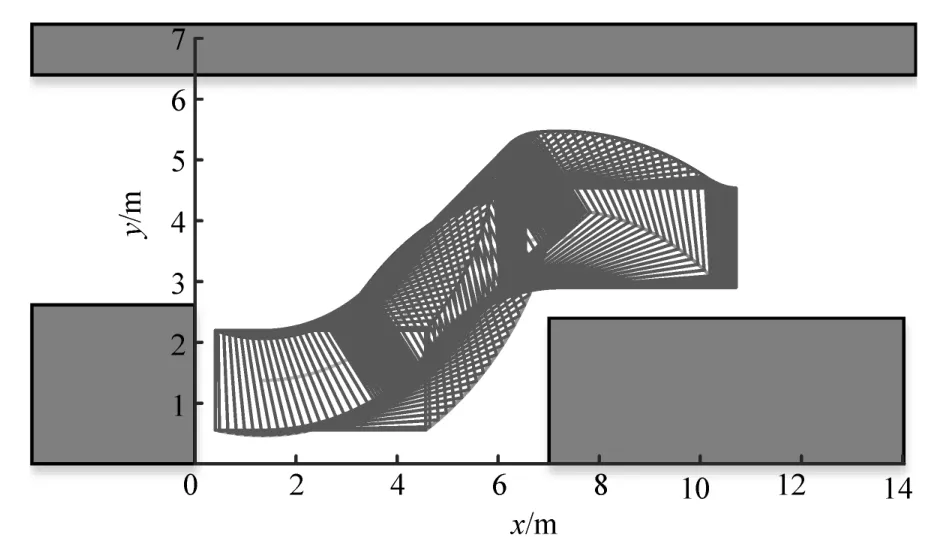
图11 D2为0.5 m的仿真结果

图12 D2为0.5 m时的转向盘转角和车速变化过程
为进一步研究,现将本文中所提算法与其他泊车算法(B算法)进行对比。B算法主要通过控制车辆横摆角从0°-45°-0°,从而实现平行车位的自动泊车,如图13所示。为方便对比,泊车终止点和各安全距离与图11的仿真条件保持一致。
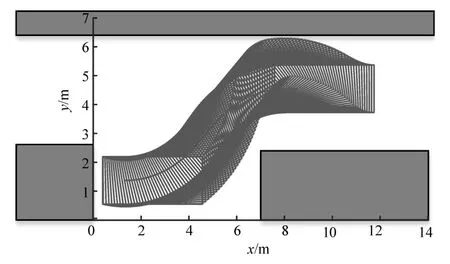
图13 D2为D min(B算法)的仿真结果
从图13和图11可以看出,在D2取Dmin时,其泊车轨迹离上边沿只有0.1 m,并不满足0.2 m的要求,这说明该算法对泊车空间有更高的要求,降低其实用性。同时,在泊车终止点相同的情况下,该算法所需最小侧向距离Dmin为2.155 m,而本文中所提算法最小侧向距离Dmin=DEB,即只需要0.2 m,这说明本文中所提算法对泊车空间要求较小,更容易在狭窄的环境中实现泊车。此外,从图14可以看出,其泊车时间较长,完成泊车需要8.1 s,大于本文的算法6.8 s,若采取提高泊车速度来缩短泊车时间,这将进一步提升对泊车空间的要求,导致泊车空间不足。
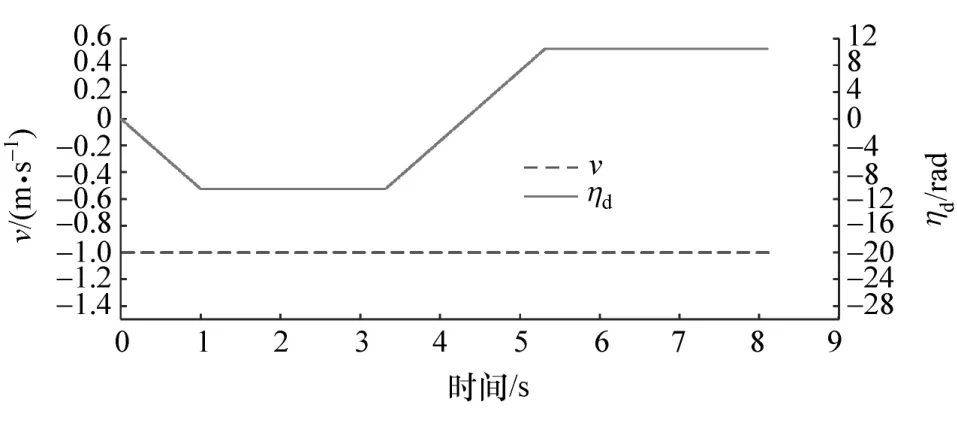
图14 D2为D min(B算法)的转向盘转角和车速变化过程
综合以上的仿真结果可以看出,本文中所提算法在不牺牲精度的情况下,减少了运算量,进而减轻对泊车系统的性能要求,实用性更强。同时在泊车过程中,对速度进行控制,进一步减少了对泊车空间的要求。
4 结论
(1)为解决泊车过程中曲率非连续问题,避免原地转向,本文中借鉴熟练驾驶员的驾驶经验,对其过程进行分析,由此提出了一种基于驾驶员经验的自动泊车规划算法。该算法主要基于驾驶员经验对泊车路径进行规划研究,并对泊车过程中各个阶段和可能发生的碰撞情况进行建模分析,并由此推导出泊车区域的要求。
(2)利用Matlab/Simulink搭建所提出的规划算法,并结合泊车过程中的极限和正常工况,对算法进行验证。仿真结果表明:本文中提出的算法能实现精确的自动泊车控制;算法的部分简化对控制器控制精度影响较小,简化结果行之有效;控制器中的速度控制,既能满足精度要求,又能达到泊车时间要求,与预期设计思路一致。
(3)本文中解决的是一般工况下的自动泊车问题,对于一些特殊工况下的自动泊车问题未必适用,比如车辆前方有障碍物致使泊车可行区域D2不满足要求。因此,为应对各工况下的自动泊车问题,后续研究中将在优化本文算法的同时,着手解决特殊工况下的自动泊车问题。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2021年23期)2022-01-05
汽车画刊(2020年5期)2020-10-20
汽车电器(2020年9期)2020-09-30
祝您健康·文摘版(2020年3期)2020-04-09
小猕猴智力画刊(2019年8期)2019-09-12
汽车杂志(2018年6期)2018-06-25
现代家长(2018年11期)2018-01-05
作文周刊·小学一年级版(2017年27期)2017-08-10