
传感技术在农业机械自动控制系统中的运用探讨
2019-08-22 11:10赵亮
微型电脑应用 2019年8期
赵亮
(宝鸡职业技术学院 机电信息学院, 宝鸡 721013)
0 引言
农业机械化的发展将会逐渐实现机电一体化发展,而传感器的使用是实现机电一体化的关键,它能够实现快速、精准的获得农业信息,从而实现农业的机械化操作,同时也能够更好体现农业机械化的水平。在农业机械化使用中,实现农业机械的检测和信息处理,主要是通过传感器技术进行实现。
1 农业机械化中传感器自动化控制技术
关于农业自动化机械传感器的使用,美国、日本、德国等国家对该项技术的研究比较成熟,取得了很大的成就,像美国这样的发达国家,比我国使用农业自动化要早,我国实现农业自动化比较晚,目前还是处于理论和探索实践时期。自动导航就是根据传感器传输的实施测量数据,提供车辆的信息和位置,之后根据这些数据做出命令决策,是向前进,还是向后退,或是转动等行为。在实际技术上的使用包括3个方面:测量车辆的位置和姿态并进行处理;控制车辆的转向;控制导航决策的方法。农业比较常用的车辆模型是多变量的系统形式,导航系统包括横向的控制和纵向的控制,但是目前的农业机械化作业速度还是很低,不需要市场变动。目前,传感器使用的导航系统有一下几种:
(1)视觉导航
视觉导航就是将摄像头安装在车身上,然后根据获得的周围环境情况进行导航。摄像机可以收集图像资料,之后经过处理可以指导机械进行农业行间作业,同时也能对路径进行设计,实现车辆的自动化。
德国建筑工程监理会(KTBL)和农业技术研制了一款旋耕化的机器人,它能实现除草和播种的作业,这种机器人是使用了地垄和传感器技术,让机械根据地垄进行自动化作业。Mansour H A[2]等研究提出,在田间可以移动的觉性控制机器人,这种机器人主要使用视觉图片处理技术获得透视线,在根据透视线了解导航轨迹,使用的统计学原理,对收集到的图片进行Hough变化和分割处理,从而模拟导航路径,歌且研究成果稳定较好。
湖南省工程农业装备技术研究中心也有人研究了全方位的视觉传感器技术,它能够对作物进行360度的分析扫描,并获取图像信息,根据这些信息对目标方向进行确定。这种机械原理包括的系统有计算机、全方位视觉传感器、计算机软件、人工标识、试验车辆等,这种农用系统车辆可以很好的实现自动化导航。另外,也有研究提出,使用图像扫描技术中的SF算法可以提取导航基准线,但是SF算法对处理技术要求较高,同时也对农作物之间的间隔和连续性有很高的要求,不然很容易出现图像缺失情况,能够在垄间作物中使用。
(2)GPS导航
GPS系统可以说话是我国各领域使用比较普遍的技术,它是由24颗卫星组成的一个较大的网路系统,可以对全球任何位置进行实时定位,同时也能进行全天候的检测。GPS技术包括:DGPS(差分定位技术)、实时动态技术定位(RTK-GPS)。如果是在室内环境中进行农业实施,会阻挡GPS信号,造成机械作业不稳定性,所以只是使用GPS定位技术,实现的精度比较低,它需要与其他的导航技术相结合使用,才能提高精度。
(3)激光导航
激光导航在自动化驾驶农业机械中使用比较多,它的优势就是测量的精度比较高。Liang S[4]等研究提出,将激光传感器使用到农业机械中,可以根据感应到的不同距离,获得工作区域的信息,从而实现自动化的导航。在西北农林科技术大学有人提出使用激光扫描仪到农业机械化中,利用激光扫描仪可以获取果林的信息,从而实现果园农业机械自动化控制。在试车验证中,激光传感器具有很好的可靠性和实用性,它能够快速的得到农业准确的信息和位置,但是没有考虑到机械的动力学和复杂路况因素。
(4)多传感器融合
因为农业环境是多种多样的,所以只是使用传感器技术进行作业已经满足不了目前农业机械的需求。将多种传感器技术相融合,建立一个多个传感器结合的系统,可以是展现更好的、更精确的定位。日本北海道农业研究中心也研究了多种传感器结合的技术,他们和时间设计了一个在卡尔曼滤波器基础上实现自动化机械导航的系统,从而完成了多种传感器技术结合的目的。在这个研究中,是由GPS技术提供导航数据,之后使用角速度进行数据计算和纠正,从而实现车辆在田间作业的功能。余国雄[5]等研究,将光纤陀螺仪和GPS等技术相结合,由光纤陀螺仪获取和矫正车辆导航信息,工作速度控制在0.7m/s下,该研究的误差非常小。
2 农业机机械自动化的传感器技术的运用
2.1 传感器自动化机械插秧机的使用
(1)补苗预告
在乘坐式的插秧机中,想要保证秧苗插种的连续性,首先要控制秧箱上的秧苗数量,这时可以利用自动化补苗预告技术。比如:图1中的补苗预告装置图。在这个秧箱板上安装了一个微动式的开关传感器。而图1中的左图是如果秧苗比较重,这时就会压住传感器,这时警报灯连接的线路机会被切断,灯则不会发亮。而右图则是将秧苗减少一些,这个传感器就会发挥作用,与警报灯相连接,从而发出补苗的信号。
使用这种机械进行农业操作,在实际应用中有机械的各种原因,会出现漏插情况。目前开始有研究将光敏晶体使用到检测控制装置系统中了。
(2)车轮升降调节装置
为了实现农业自动化机械能够在凹凸不平的田地间工作,同时也能保证插秧的深度性,这些需要对机械体和插秧装置进行合理调整。将秧船传感器使用到该装置中,如图2所示。
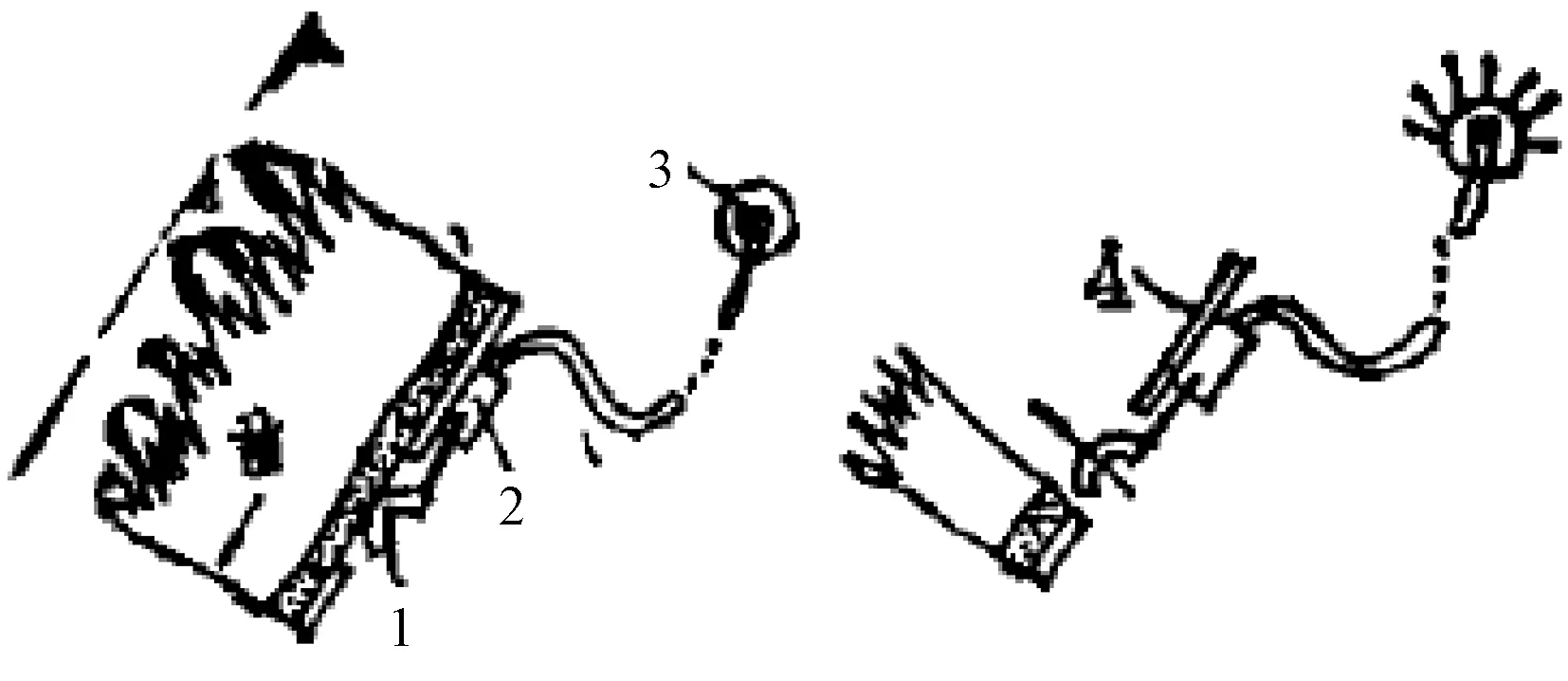
(1:传感器;2:微动开关;3:警报灯;4:秧箱)
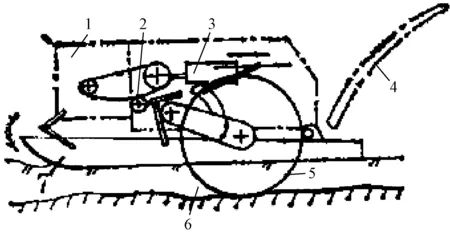
(1:发动机;2:张紧轮;3:油缸;4:秧箱;5:车轮;6:硬低层)
在机体下沉的情况,秧船会与机体保持相对上升的情况,这时在张紧轮上安装的秧船也会逐渐上升,同时利用皮带轮张紧装置,驱动油缸和油泵,带动插秧装置上升,避免插秧出现较深的情况。在机体逐渐上升的过程中,秧船会逐渐下降,与上述情况是相反的。控制张紧轮系统可以使用液压指控式的转换阀代替。
2.2 自动化传感器技术在果树中的使用
(1)水果收获机
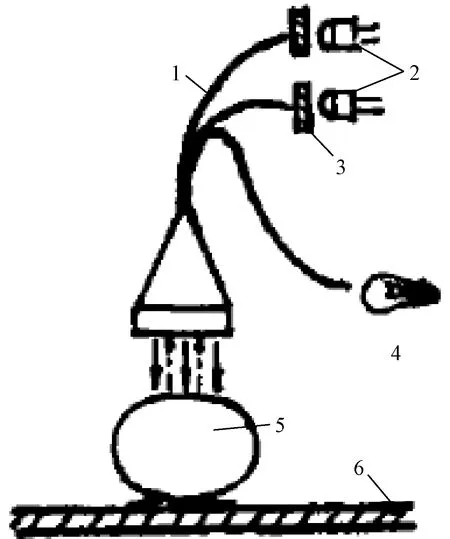
为了能够将熟透的果实中出现的杂物实现高效清除,同时也能够分析处没有成熟的果实,这里有研究研制了一个分选机,如图3所示。

(1:光源;2:收光回路;3:气缸;4:合格品;5:土块、未成熟的果实;6:定位传输带)
图3 颜色选果机
这种机械是使用光电晶体管和光电管作为元件,根据不同光的发射强度来分析或是的成熟度,同时利用气缸作用,将没有成熟的果实排出。
各种果实成熟度不一样,颜色也是不一样的,那么光的反射情况也会不一样,而且发射率也有差异,这里可以对反光强度差异进行分析,同获得不同的控制命令,实现控制清除任务。在实际使用中如图4所示。
(1:光导纤维束;2:光电晶体管;3:光学滤色器;4:灯;5:西红柿;6:输送带)
图4 颜色选果机的传感器设备
想要减少照射光的影响,可以使用电卤灯,这时可以增加观察面积,使用光导纤维,可以实现只能通过红光或是绿光滤色器进行光强度检测,这时可以使用黑色吸光的材料进行耕作。
2.3 半喂入联合收割机的自动化农作物机械
自动控制喂入深度:想要实现各种收割机可以在不同的条件下都有良好的工作情况,这里可以对喂入深度进行自动控制。见图5。它是将传感器安装在输送链结合扶禾器等部件上,从而实现对茎秆作物的连续检测。喂入深度传感器的示意图,如图6所示。
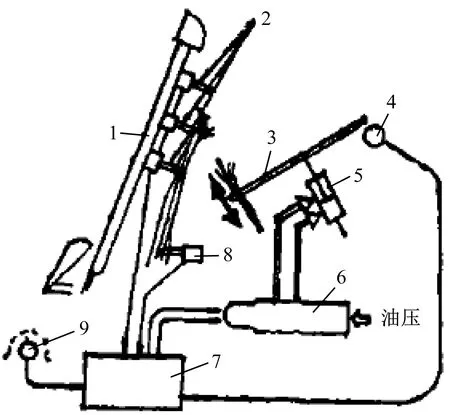
(1:扶禾支架;2:穗头传感器;3:喂入装置;4:反馈式喂入深度电位器;5:喂入深度控制缸;6:电磁阀;9:控制位置调节制度盘)
图5 喂入深度自动化控制图
它是在传感器与作物相接触,使用喂入传输装置和油缸进行上下动作的控制,从而控制喂入的深度。
3 总结
目前,关于农业自动化控制系统中使用的传感器技术比较多,传感器的使用多是跟其他技术相结合使用来提高农业机械化效率。传感器在农业机械中的使用,需要根据农作物的不同进行设计,这样满足农业收入和耕种需求。
猜你喜欢
湖北农机化(2021年15期)2021-12-07
河北农机(2021年8期)2021-08-24
农业知识(2021年6期)2021-04-02
新农业(2020年18期)2021-01-07
今日农业(2020年16期)2020-12-14
当代工人(2020年8期)2020-05-25
农民致富之友(2019年17期)2019-07-01
小溪流(画刊)(2017年12期)2018-01-10
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
党员文摘(2009年8期)2009-08-22
