
采用RBF神经网络PID控制的液压挖掘机运动误差研究
2019-08-22 11:10崔慧娟
微型电脑应用 2019年8期
崔慧娟
(咸阳职业技术学院 机电(技师)学院, 咸阳 712000)
0 引言
挖掘机在施工领域内的应用非常明显,大约有2/3的石方和土方开采工程由挖掘机完成[1-2]。挖掘机工作环境相对复杂,操作稍微不当就会发生事故,甚至造成人员伤亡。当前,挖掘机大多采用人工进行操作,驾驶员的人身安全很难得到保障。若想提高驾驶员操作效率,需要对驾驶员进行长期培训,使得生产成本增加。随着信息化的迅速发展,液压挖掘机智能化很快将会实现,不仅可以提高挖掘机工作效率,而且可以完成各种危险环境中作业。但是,挖掘机手臂执行任务过程中,需要准确的定位,若控制不当,则会造成重大经济损失。因此,研究高精度的液压挖掘机控制方法,促进国家经济发展具有重要意义。
目前,很多学者对液压挖掘机控制方法进行了研究。例如:文献[3-4]研究了液压挖掘机模糊PID控制方法,设计了电液比例系统仿真模型,给出经典PID控制器方程式,根据模糊规则建立液压挖掘机模糊PID控制方法,通过仿真检验模糊PID控制效果,从而提高了控制系统响应速度。文献[5]研究液压挖掘机PID控制方法,分析了挖掘机液压系统的组成部分,给出了PID控制方程式,通过调节比例、积分和微分系数实现液压挖掘机在线控制,但是该控制系统的抗干扰能力较差。文献[6]研究了液压挖掘机单片机控制方法,给出液压挖掘机模型设计的总体方案,分析了控制系统的硬件和软件,采用单片机逻辑控制方法,从而提高挖掘机工作效率。文献[7]采用模糊自整定神经网络算法对两自由度小型电液挖掘机进行控制,建立了二自由度小型电液挖掘机的数学模型,针对圆轨迹跟踪问题,设计了模糊PID控制方法,它的两个环节由电动机控制的泵系统驱动,该控制器比传统控制器具有更好的控制性能。以往研究的挖掘机控制方法,控制精度较低,很难满足挖掘机执行高精度任务的要求。对此,本文对传统PID控制方法进行改进。创建挖掘机液压驱动装置简图模型,推导出液压缸负载流量方程式。在传统PID控制基础上,设计了RBF神经网络PID控制器。通过MATLAB软件对液压驱动活塞跟踪误差进行仿真,为提高液压挖掘机运动轨迹精度提供参考价值。
1 挖掘机液压驱动数学模型
本文采用液压驱动挖掘机手臂,其结构简图如图1所示。
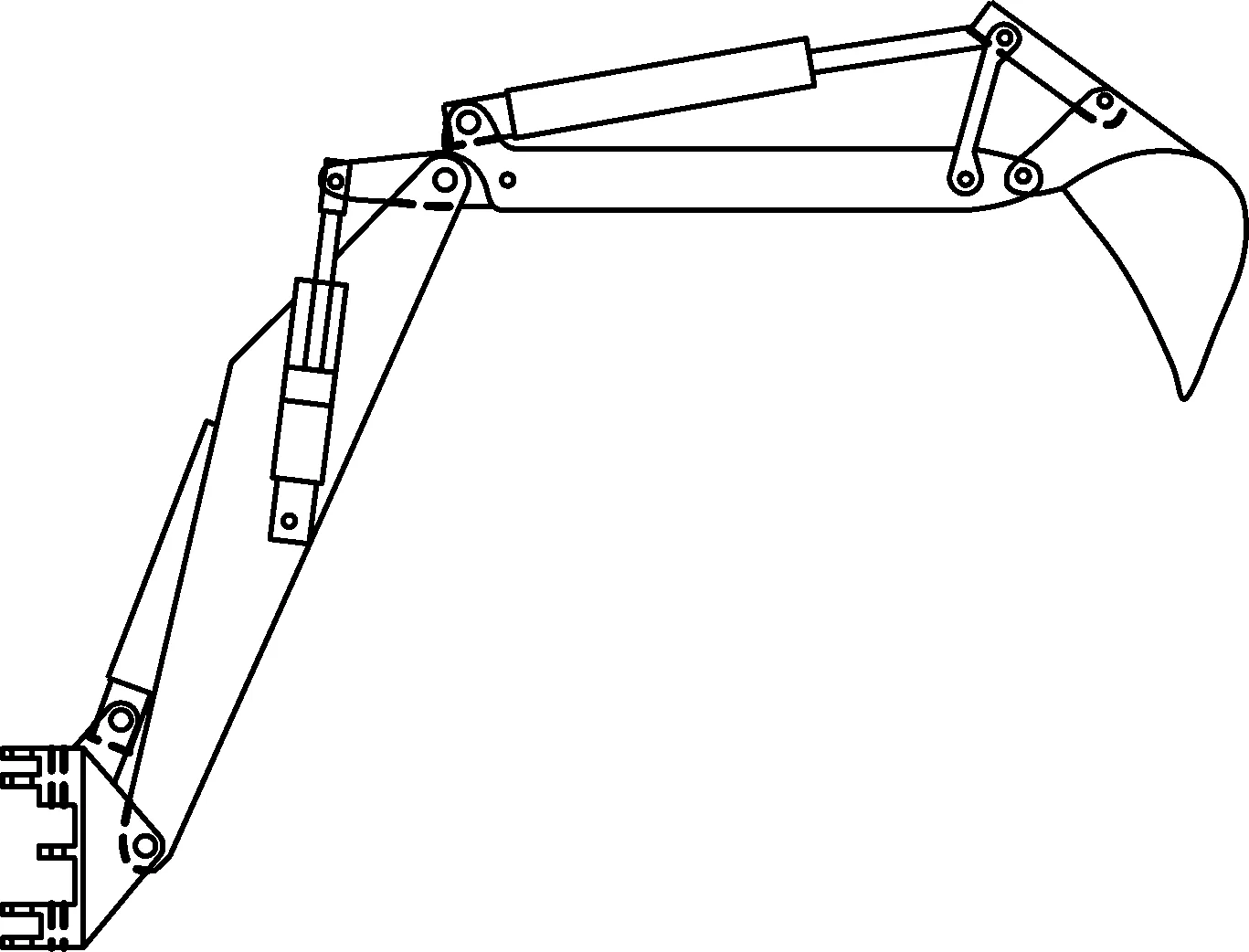
图1 挖掘机液压驱动装置
液压驱动采用伺服阀控制,其传递函数为式(1)~式(5)[8]。
式中:ksy=Ki/(LCk)为位移增益,Ck为挡板弹簧刚度系数,L为挡板长度,Ki为力矩马达力矩常数,Cl为流量系数,Ps为进油压力,KQ为伺服阀流量增益,A为阀芯端面积,Pl为负载压力,J0为挡板转动惯量,M0为阀芯质量,Ckm为力矩电机弹性力矩系数,x0、A0为阀芯中位值,ξv为阀芯阻尼比。
伺服阀阀口流量表达式为式(6)、式(7)。
式中:Q1为进口流量,Q2为出口流量,Cd为刚度系数,P1为进口压力,P2为出口压力,Ps为进油压力,X为伺服阀阀芯位移,ρ为液体密度,T为窗口面积梯度。
负载流量表达式[8]为式(8)、式(9)。
式中:n=A2/A1为流量比,PL=P1-P2为负载压力。
2 RBF神经网络PID控制
2.1 PID控制器
传统PID控制器根据输入值与输出值之差反馈来调节比例、积分和微分系数,从而提高控制对象输出精度,其控制过程如图2所示。
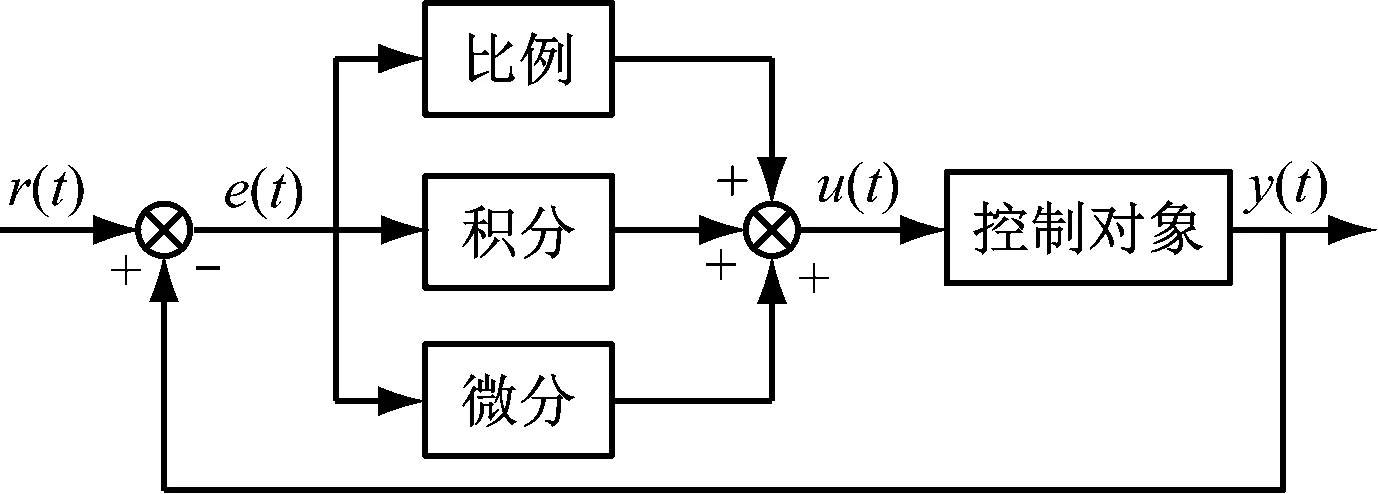
图2 PID控制流程
PID控制在线调整方程式[9-10]为式(10)。
(10)
式中:kp为比例系数;ki为积分系数;kd为微分系数。
采用PID控制器,其反馈误差方程式为式(11)。
e(t)=r(t)-y(t)
(11)
式中:r(t)为输入值;y(t)为输出值。
2.2 RBF神经网络PID控制
径向基函数缩写为RBF,RBF神经网络结构分为三层,分别为输入层、隐含层和输出层,其网络结构如图3所示。
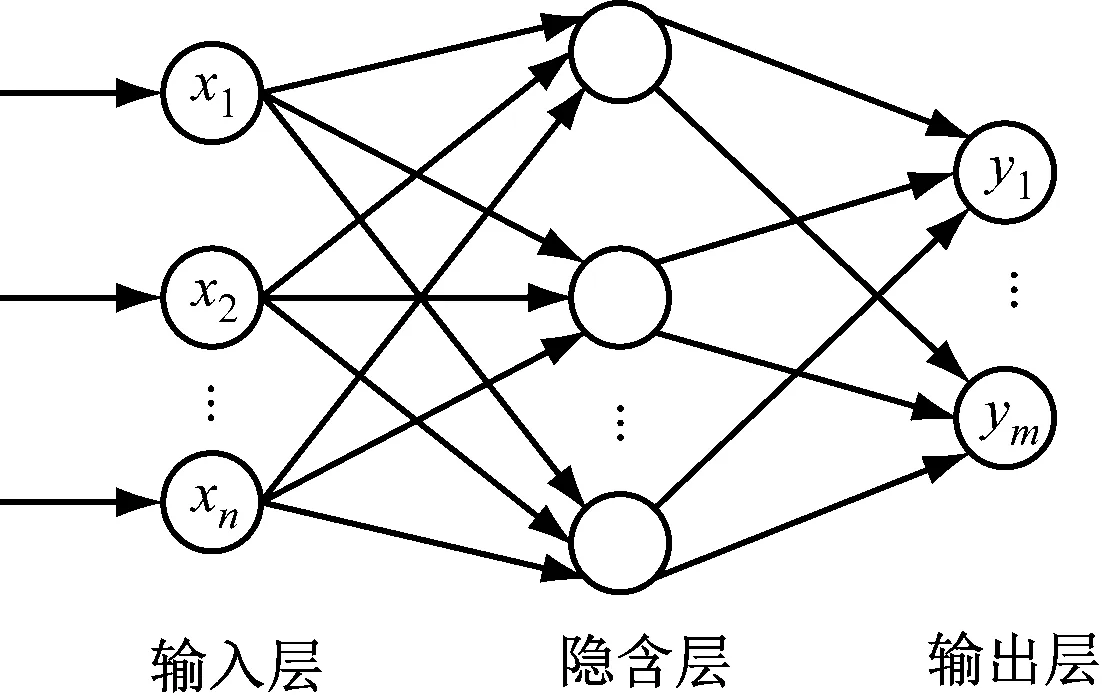
图3 RBF神经网络结构
在图3中,隐含层采用高斯基函数,其方程式为[11-13]为式(12)。
(12)
式中:ui(x)为隐含层第i个节点的输出,X为输入向量,cj为隐含层中心矢量,bj为隐含层基宽度。
采用RBF神经网络PID控制挖掘机液压活塞流程如图4所示。
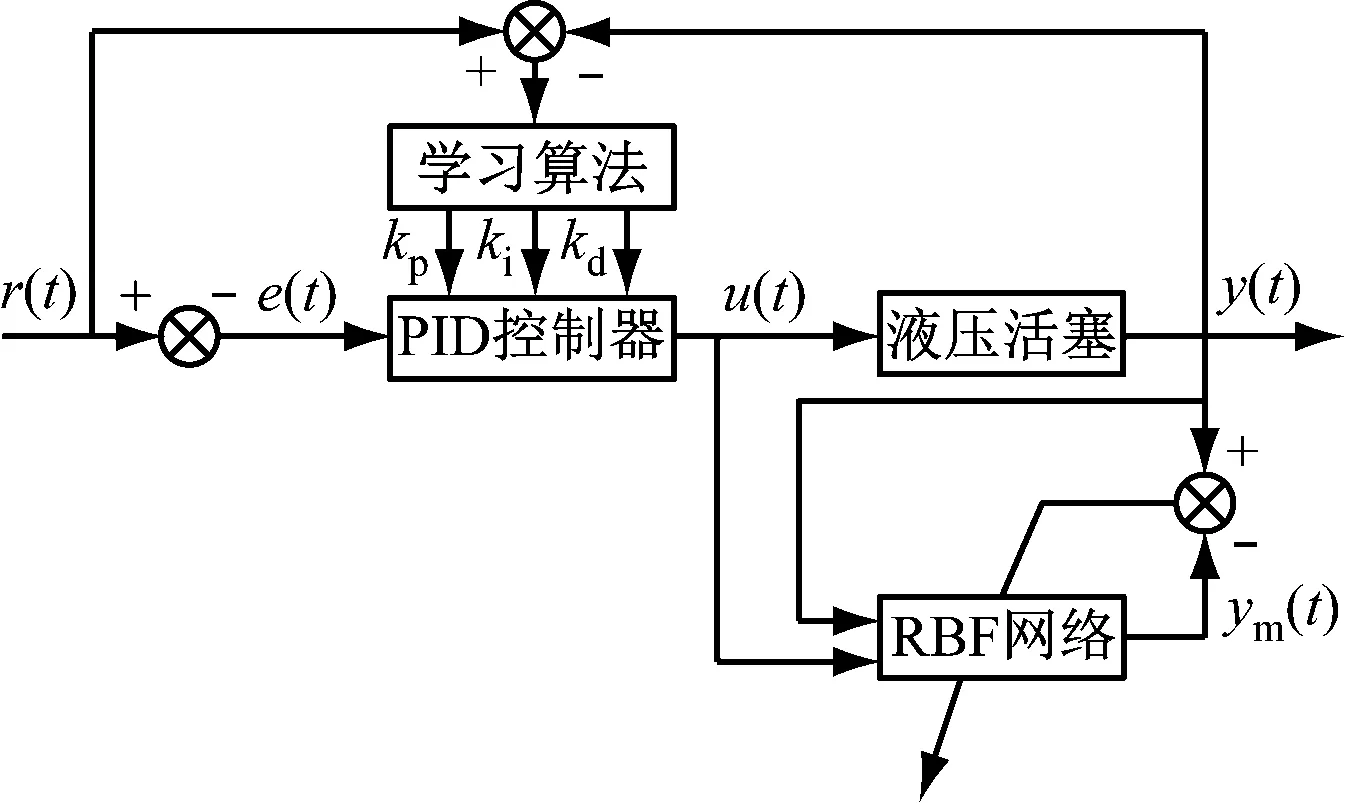
图4 挖掘机液压活塞控制流程
具体操作步骤如下。
1) 初始化RBF神经网络结构,设置节点中心、调整权值和节点宽度初始值;
2) 在线采集参数u(k)、y(k)、ym(k),计算不同时刻输出误差y(k)-ym(k),反馈给输入信号;
3) 将误差信号传递给RBF神经网络结构,调整RBF辨识网络节点、权值和节点宽度;
4) 采用梯度下降法计算Δkp、Δki、Δkd,调整PID控制器的kp、ki、kd参数,输出u(k);
5) 若满足条件,则输出ki、kp、kd参数,否则,更新调整参数,返回步骤2),重新迭代学习。
3 仿真与分析
挖掘机液压驱动活塞运动位移控制精度直接影响到手臂定位精度。本文采用MATLAB软件分别对PID控制和RBF神经网络PID控制误差进行仿真验证。仿真初始参数设置如下:学习速率η=0.35;动量因子α=0.05;PID控制器初始调节参数为kp=15、ki=8、kd=0.03。假设挖掘机液压驱动活塞运动角位移为x=4sin2πt,则采用PID控制和RBF神经网络PID控制输出误差分别如图5、图6所示。
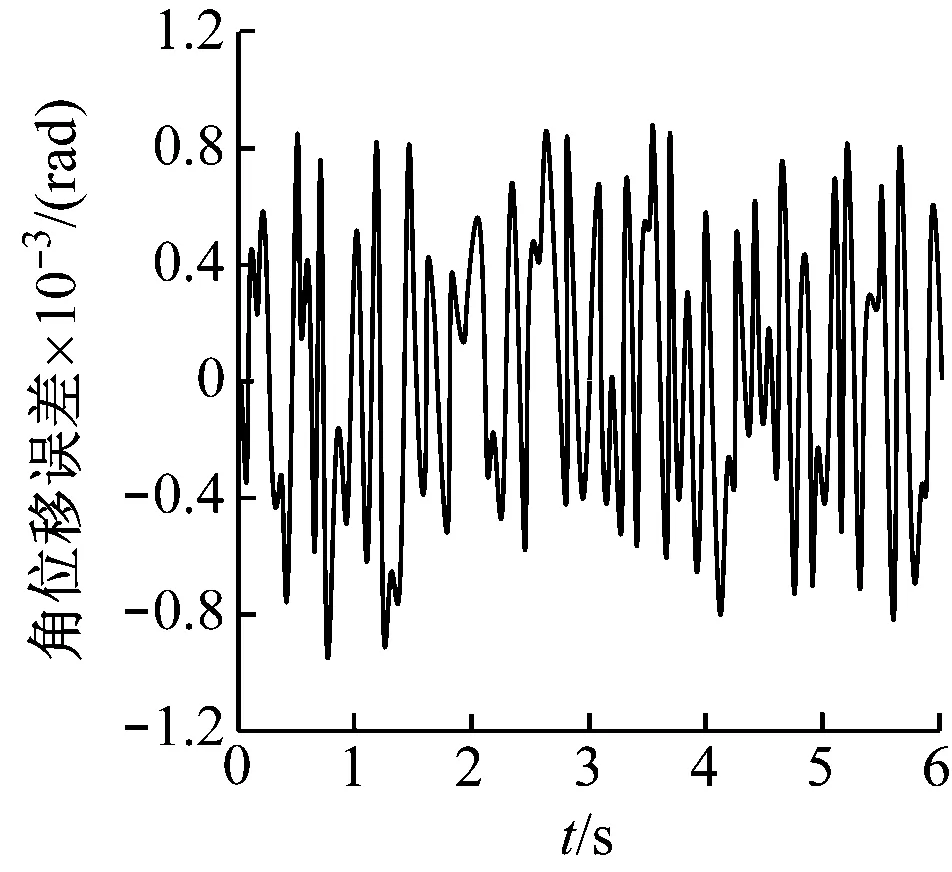
图5 PID控制角位移误差
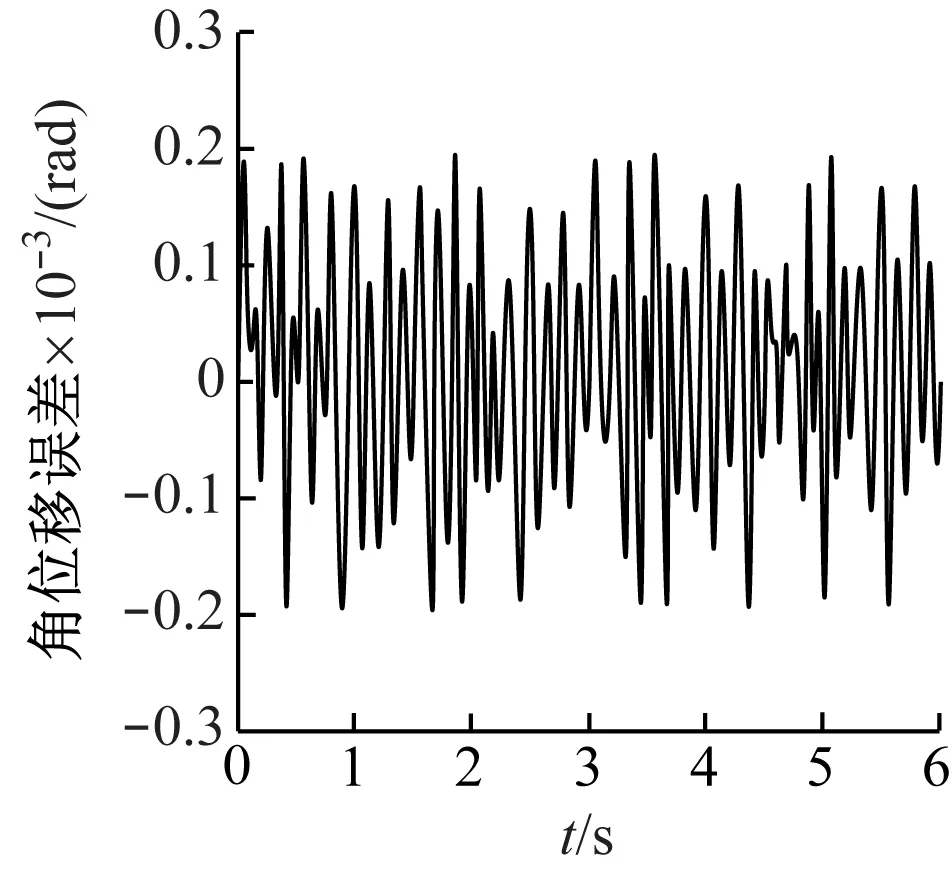
图6 RBF神经网络PID控制角位移误差
由图5可得:采用传统PID控制器,挖掘机液压驱动活塞运动角位移产生的最大误差为0.95×10-3rad。由图6可得:采用RBF神经网络PID控制器,挖掘机液压驱动活塞运动角位移产生的最大误差为0.19×10-3rad。因此,采用RBF神经网络PID控制器,挖掘机液压驱动活塞定位误差较小,可以精确完成挖掘机手臂运动轨迹的跟踪任务。
4 总结
本文采用RBF神经网络PID控制液压挖掘机运动轨迹,并对控制角位移误差进行仿真。主要结论如下:
1) 采用简图模型创建挖掘机模型,可以简化研究过程,使复杂结构简单化,便于推导挖掘机流量运动方程式。
2) 传统PID控制器,容易受到外界环境因素的干扰,产生的角位移误差较大,最大误差为0.95×10-3rad,而RBF神经网络PID控制器能够抑制外界环境因素的干扰,产生角位移误差较小,最大误差为0.19×10-3rad。RBF神经网络PID控制输出角位移最大误差明显低于传统PID控制器,控制精度较高。
2) RBF神经网络PID控制器,结合神经网络和PID控制器二者的优点,将误差反馈给神经网络,通神经网络迭代算法,能够在线调整PID控制参数,使系统输出误差波动幅度较小,从而保持控制系统的稳定输出。除此之外,RBF神经网络PID控制还可以用于其它领域控制。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
学生天地(2020年16期)2020-08-25
汽车零部件(2019年7期)2019-08-16
民用飞机设计与研究(2019年2期)2019-08-05
有色金属设计(2015年2期)2015-02-28
汽车与新动力(2015年1期)2015-02-27
汽车与新动力(2015年1期)2015-02-27
筑路机械与施工机械化(2014年10期)2014-03-01
筑路机械与施工机械化(2014年8期)2014-03-01
汽车与新动力(2014年5期)2014-02-27
