
空间曲梁景观步行桥人致振动分析及减振设计
2019-08-21 06:19:02蒋长江梁俊松
城市道桥与防洪 2019年8期
蒋长江,梁俊松
(中铁二院工程集团有限责任公司,四川 成都 610031)
0 引言
城市景观步行桥对美学要求高,结构形式复杂,多为空间组合结构。随着桥梁技术的发展和高强轻质材料的使用,景观步行桥变得越来越轻柔、大跨和低阻尼化[1],桥梁结构振动基频也越来越小,很难满足我国《城市人行天桥与人行地道技术规范》(CJJ 69—95)的规定:为避免共振,减少行人不安全感,天桥上部结构竖向自振频率不应小于3 Hz。人行桥的人致振动主要影响的是桥梁的使用性,采用规范规定的振动频率评判标准,将能避免由于人行荷载所引起的不利振动现象;而对于桥梁基频不能满足规范要求的情况,应对人行舒适性进行评估,必要时进行减振设计。因此,本文以某空间曲梁景观步行桥为例,介绍人行桥的舒适性评估方法,并进行基于调频质量阻尼器(TMD)的减振预案设计。
1 景观步行桥概况
某中央公园景观步行桥为双索面空间索斜拉人行桥(见图1),跨径布置为72 m+32 m+72 m。人行净宽为5~9.76 m,由桥台渐变至中间墩。中间墩位置处设置2个楼梯,宽度为3 m,楼梯下端固定,上端搭在横梁上。桥塔为圆形钢结构,垂直倾角25°。桥塔穿过桥面板后用螺栓锚固在承台上,塔梁分离,桥塔内设加劲。每个桥塔连接11对拉索,塔上索间距1.14~2.34 m不等。

图1 景观步行桥效果图
主梁平面为“S”曲线型,断面为组合结构,2根工字钢梁通过剪力钉与混凝土桥面板相连。工字钢梁高度为0.8 m,上翼缘宽度0.4~0.7 m,下翼缘宽度 0.6~0.9 m;桥面板宽度为 5.84~10.6 m,厚度为0.25~0.3 m;主梁外包厚4 mm的不锈钢装饰板。桥面设2%双向横坡,桥面最大纵坡5.24%。
2 人致激励分析理论
2.1 人行荷载的力学模型
人行激励振动的特性取决于人行荷载的特殊性。人行荷载应考虑单人行走和人群行走状态下的力学模型。
人的行走由连续的步子形成,具有周期性。这种周期性激励在竖向和侧向都可以用傅里叶级数的形式表示,级数中高阶频率是基频的整数倍,但基频的大小在竖向和侧向不同。人行竖向激励的傅里叶级数的基频大约是2 Hz,侧向基频是竖向的一半。单人在桥上行走时,基于步行力的周期性,竖向力Fv和侧向力Fl都可以用傅里叶级数的形式表示[2-3]:式中:G为人的体重;t为时间;fp为步频;αvi和 α1i分别为竖向力和侧向力的第i阶动载因子,φvi和φli分别为竖向力和侧向力的第i阶谐波相位角。
根据现有的研究结论,各阶谐波的动载因子取值不同,其中竖向力1阶谐波动载因子最大,高阶谐波动载因子迅速减小,一般只需考虑前3阶或前4阶谐波。在参考英国规范[4]的基础上,可按下式计算人行荷载:

其中动载因子 0.36、0.13、0.033、0.009 是参考几种试验结果的平均值。
人群在桥上行走时,人步行对桥面产生周期性的作用力,一般情况下只引起较小的振动响应。但当步行侧向力的频率接近人行桥侧向振动固有频率时,将引起桥面明显的可感振动,人与桥之间开始发生强烈的相互作用过程。由于行人对侧向振动较为敏感,当振动影响其步行舒适性和平衡时会下意识地随之晃动并调整步伐,通常的方式是加大步伐的横向晃动幅度和调整步伐与振动同步调。这种人对振动的自发反应和步伐调整策略是人的生理与心理机能的表现,一定程度上是人的共同特性。不同的行人将以同样的方式调整步伐即形成同步调行走,产生更大的步行激励,由于该激励与振动同步,从而导致结构发生严重的共振,这被称为人群步行的集体同步现象[5]。
人群在桥上行走时,由于行人间步行不一致,不同人的步行力相互消减,按照荷载等效原则,人数为N的人群荷载可折减为Ne个步调一致的行人产生的荷载,二者的比值称为同步调概率。Matsumoto等[6]研究随机步行人群对人行桥的激振时,假设行人上桥事件服从泊松分布,且相位互不相关,根据随机振动理论得出,实际的步行人群由于某些因素将引起一定程度的同步调,则Ne介于和N之间。
2.2 舒适性评价指标
人行激励振动带来的是桥梁的适用性问题,舒适性指标是未引起行人感觉不适的加速度允许值。参考国内外相关规范的描述,如英国规范BS5400和欧洲规范EN1990,其竖向加速度的允许值可表示为由于行人对侧向振动更敏感,侧向加速度的允许值也相对更为严格,允许值表示为。其中,f为桥面竖向自振频率,大多数情况下可以假定为基频f0。
3 人致激励分析方法
3.1 桥梁自振特性分析
运用Midas/Civil对该景观步行桥建立全桥有限元模型(见图2)。用梁单元模拟工字钢主梁、混凝土桥面板及桥塔,桁架单元模拟拉索,混凝土板与钢主梁采用虚拟梁连接,忽略剪力钉的刚度影响。整个计算建立在全结构弹性受力基础上,即假设混凝土桥面板不退出工作。
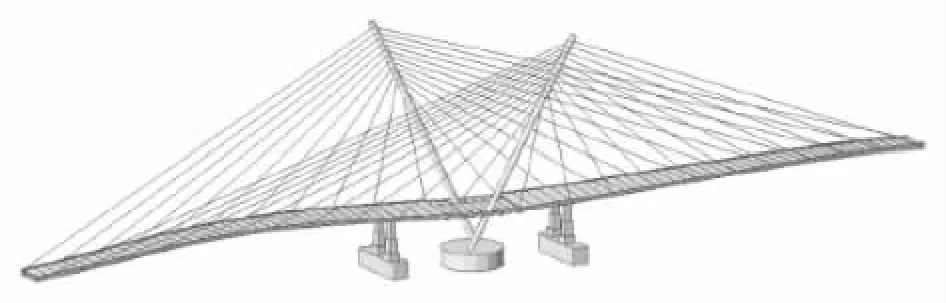
图2 全桥有限元模型
对建立的全桥有限元模型进行动力分析,提取全桥的前15阶频率和振型,如表1所示。
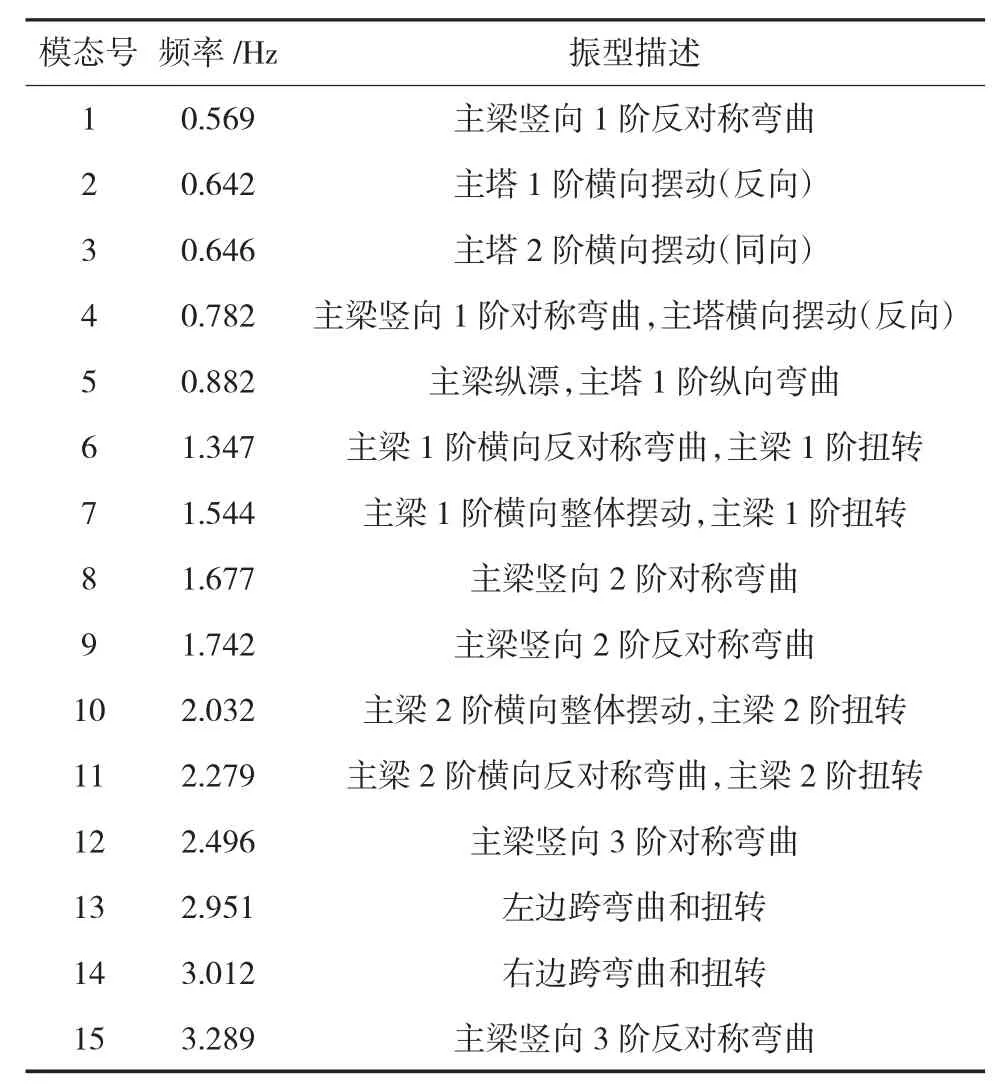
表1 全桥前15阶频率和振型
该桥的基频为0.569 Hz,对应振型为主梁竖向1阶弯曲,不满足规范不应小于3 Hz的要求。国外最新修订的人行桥规范BS5400(BD/01)和EN1990认为,人行桥竖向基频小于3 Hz、侧向基频小于1.5 Hz时,应当进行人致振动分析和评估。从该桥的频率分布中可以看到,该景观步行桥的竖向基频为0.569 Hz,侧向基频为1.347 Hz,均小于相应的规定值。另外,有多个振型的频率落入与人行激励频率较接近的范围(竖向为1.6~2.4 Hz,侧向为0.8~1.2 Hz)。特别是第10阶振型,该振型为主梁2阶横向整体摆动和主梁2阶扭转,振动频率为2.032 Hz;大量的研究结果显示,人群荷载的激励频率均值为2 Hz,二者非常接近,有可能激起结构的大幅度振动。
3.2 不同工况下人致振动分析
3.2.1 人群随机步行状态下的振动响应
采用Midas/Civil软件进行动力时程响应分析。根据英国规范中的推荐方法,用1阶谐载模拟人行荷载,竖向动载因子取为0.36,侧向动载因子取为0.033;结构阻尼比取1.0%;激励频率分别取值为可能引起主梁竖向和侧向某阶振动共振的频率,计算结果如表2所示。
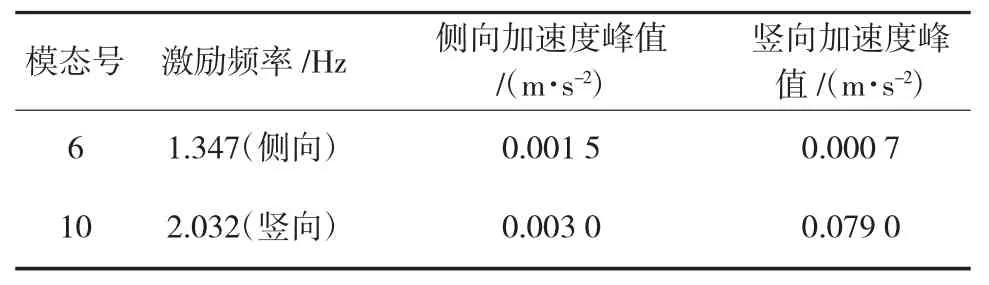
表2 激励荷载作用下人行桥的振动响应
该景观步行桥的振动基频为0.569 Hz,则竖向加速度限值为aylim=0.377 m/s2,侧向加速度限值为allim=0.106 m/s2。从随机步行的计算结果中可以看到,该景观步行桥振动的竖向和侧向加速度峰值都小于限值。因此,在设计的人群荷载作用下,若行人的步行完全随机,没有受外界影响发生同步效应,该人行桥的人致振动满足舒适性要求。
3.2.2 考虑人群同步效应的振动响应
人群同步激励是指在某种外界因素影响下一定比例的人具有一致的运动并对结构产生步调一致的激励。由于行人对侧向振动较为敏感,行人调整步伐的趋向取决于其横向晃动频率与桥梁侧向振动频率的关系,行人调整步伐前其横向晃动频率越接近桥梁侧向振动频率,达到同步调的概率越大。在振幅较小时,横向晃动频率与侧向振动频率较接近的人先调整步伐到同步调,而随着振幅增大,2种频率相差较大的人也被“吸引”到振动频率上来。根据学者的研究,同步调概率与振幅的关系[5]为:

式中:Ps(A)为同步调概率;A为侧向振幅;C1为常数,根据试验数据拟合得C1=0.022;vf为考虑振动频率偏离人体横向晃动频率对同步调概率影响的折减系数,定义为vf=exp[-c2(f-1)2],其中的f为侧向振动频率,c2为常数。对于频率为1 Hz的侧向振动,vf=1;对于侧向振动频率大于1.3 Hz的人行桥,一般认为不会发生人群同步调步行,vf取值较小。
本桥的侧向振动基频为1.347 Hz,大于1.3 Hz,按研究结果一般认为不会发生人群同步调步行,但考虑到实际工程结构和有限元分析中的诸多不确定性,假设人群中有10%的人同步调行走,保守取vf为1,分别对侧向激励频率为0.882 Hz、1.347 Hz、1.544 Hz进行迭代计算,求出可能发生的同步调行人百分比,如表3所示。
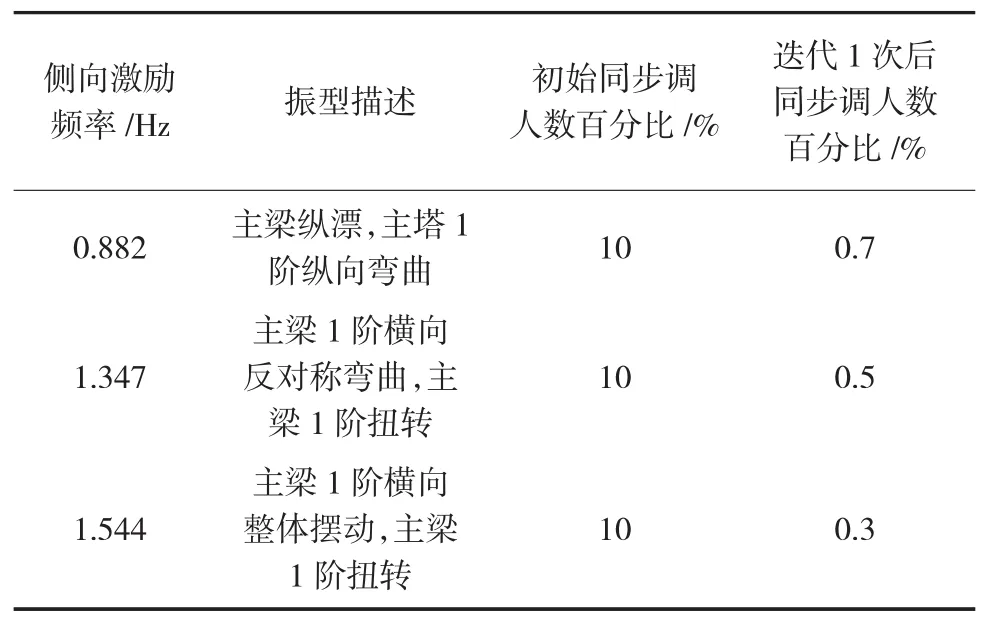
表3 不同侧向激励频率下同步调行人百分比
由同步调概率与振幅关系的公式进行迭代计算,可以发现在以上3种侧向激励荷载作用下,同步调概率很快衰减到1%以下,小于完全随机状态下的同步调人数百分比。这说明该桥不会发生人群同步调步行,与前面的理论分析是吻合的。在此情况下,计算出来的横向加速度峰值不会超过完全随机状态下相应的加速度峰值;而主梁的竖向振动响应不考虑人群同步效应,故其加速度峰值也不会超过完全随机状态下相应的加速度峰值。
因此,即使考虑人群同步效应,该桥在竖向和侧向的加速度峰值也均满足舒适性要求。
3.2.3 考虑人群荷载强迫激励下的振动响应
人行荷载竖向的平均激励频率约为2 Hz,侧向的平均激励频率约为1 Hz。考虑到在该频率的荷载作用下,桥梁可能发生较大的振动,故对其进行验算。计算时,取桥梁结构阻尼比为1.0%,横向频率1 Hz,竖向频率2 Hz,考虑完全随机状态下,横竖向同时加载进行计算。经过计算分析,得到侧向加速度峰值为0.007 3 m/s2,竖向加速度峰值为0.131 6 m/s2。
与前面计算的结果比较,此种工况下的横向和竖向加速度峰值均比前面大。这是由于在2.032 Hz时,桥梁主梁的振型为2阶横向整体摆动和主梁2阶扭转,当横向激励频率为1 Hz和竖向频率为2 Hz时,桥梁结构也会发生共振,而且横竖向的振动会相互耦合,加剧结构的动力响应。
在该工况下,桥梁主梁的侧向和竖向加速度峰值均没有超过加速度限制,满足舒适性要求。
3.2.4 考虑非全桥满布人行荷载下的振动响应
在频率为1.347 Hz时,桥梁的振型为主梁1阶横向反对称弯曲和主梁1阶扭转。考虑到横向荷载在两边跨反向加载时,可能会比同向加载引起更大的动力响应,故在阻尼比为1.0%时,计算桥梁的人致振动响应,得到侧向加速度峰值为0.0014m/s2,满足加速度限制要求。
在频率为1.742 Hz时,桥梁的振型为主梁竖向2阶反对称弯曲。考虑到桥梁只有一边跨加载,可能比满跨加载会引起更大的动力响应,故在阻尼比为1.0%时,计算桥梁的人致振动响应,得到竖向加速度峰值为0.021 6 m/s2,满足加速度限制要求。
4 减振预案设计
根据上述评估结果,该中央公园景观步行桥理论上不会发生超越行人舒适性的人致振动,但考虑到实际结构的不确定性以及该桥的重要性,补充设计TMD减振预案,以保证能及时有效地解决运营过程中可能出现的人致振动。
4.1 理论基础
调频质量阻尼器(Tuned Mass Damper,TMD)系统是结构被动减振控制体系的一类,它由主结构和附加在主结构上的TMD组成。其中TMD包括固体质量、弹簧减振器和阻尼器等,它具有质量、刚度和阻尼,通过改变质量或刚度来调整TMD的自振频率,使其尽量接近主结构的基本频率或激振频率。当主结构受激励而振动时,TMD就会产生1个与结构振动方向相反的惯性力作用在结构上,使主结构的振动反应衰减并受到控制。子结构在振动控制过程中相当于1个阻尼器。
对于图3所示作用力p(t)作用下的单自由度结构体系,其运动方程为:
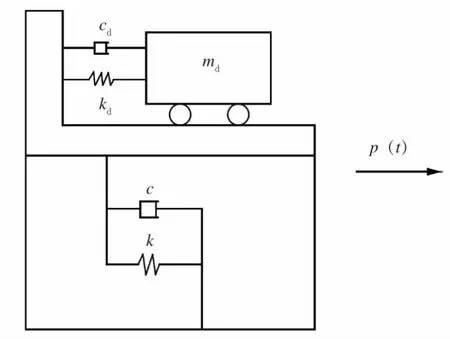
图3 TMD结构示意图
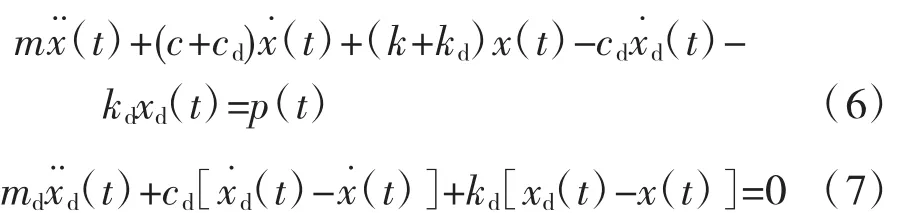
式中:m、c、k分别为主结构的质量、阻尼和刚度;md、cd、kd分别为 TMD 的质量、阻尼和刚度;x(t)、x˙(t)、x¨(t)分别为主结构的位移、速度和加速度反应;xd(t)、x˙d(t)、x¨d(t)分别为TMD的位移、速度和加速度反应;p(t)为外部激励荷载。
当p(t)为简谐荷载,以主结构最小加速度为优化准则,TMD的频率比和阻尼比优化值如下:
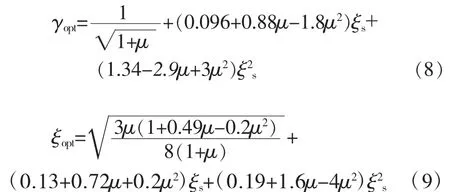
式中:μ为TMD质量与主结构质量比;ξs为主结构阻尼比;γopt为TMD优化频率比,即TMD频率/主结构频率;ξopt为TMD优化阻尼比。
4.2 TMD参数设计
综合考虑各阶加速度的峰值和振型参与质量,决定对该桥的第7阶(1.544 Hz,主梁1阶横向整体摆动,主梁1阶扭转)进行横向控制,作TMD参数设计,其余各阶振动不予控制。
全桥总质量为3 216 t,第7阶横向振动模态质量为 3 216×29.61%=952.26 t,振动频率为1.544 Hz。取主结构的阻尼比为1.0%,根据加速度最小优化准则,可算得不同质量比条件下TMD的频率比和阻尼比。
将主结构与TMD简化成2自由度体系,建立2自由度系统的动力微分方程,分析该体系在谐振荷载作用下的时程反应。若为简谐激励,则运动方程为:
对于上述常系数非线性的微分方程组,借助MATLAB中Simulink来建模整个系统以获得其数值解。
由于主结构模态质量较大,为避免对主结构产生过大附加荷载,不宜选用较大的质量比。当选用的质量比 μ=0.2%时,TMD的质量mt=μms=1 904.5 kg,取主结构阻尼比ξs=1.0%,其余的相关计算参数为:ms=952 260 kg,cs=1.85×105kg/s,γopt=1.0,kt=1.79×105kg/s2,ct=1 059.8 kg/s。
采用激励荷载p(t)=700 sin(2π×1.554t),主梁加速度时程如图4所示,并与没有安装TMD时的主梁加速度时程(见图5)对比。
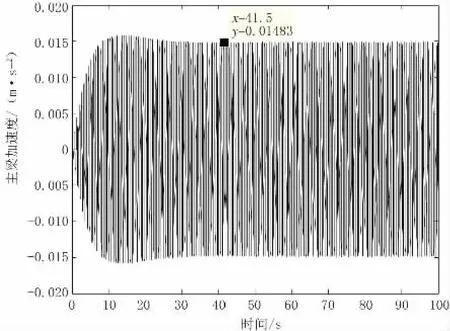
图4 安装TMD的主梁加速度时程
当安装有TMD系统后,稳态情况下主梁的加速度峰值从0.036 4 m/s2下降到0.0148 3 m/s2,下降幅度为59.26%,减振效果良好。在工程实际实施时,可以分别在两边跨跨中预设计TMD装置的连接构造。TMD的质量可取1.9 t,横向安装。TMD的具体实施情况需要根据成桥后所测得的桥梁相关动力参数而定。
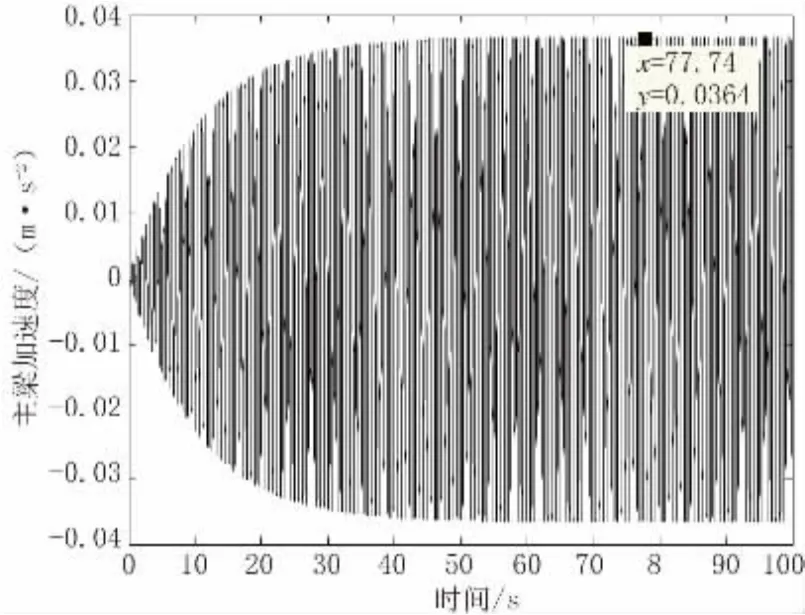
图5 无TMD的主梁加速度时程
5 结语
本文综合国内外有关人行桥的人致振动研究和设计规范规定,基于简化的力学模型,以某空间曲梁景观步行桥为例,考虑不同工况下人群荷载的人致振动响应,并根据舒适性评价指标进行人行桥舒适性评估。结果表明,该中央公园景观步行桥理论上不会发生超越行人舒适性的人致振动,但考虑到实际结构的不确定性以及该桥的重要性,对该桥进行基于调频质量阻尼器(TMD)的减振预案设计。安装TMD后,该桥主梁的加速度峰值大幅下降,减振效果良好,能有效解决运营过程中可能出现的人致振动问题。
猜你喜欢
中国人民公安大学学报(自然科学版)(2022年1期)2022-07-20 02:51:14
新疆大学学报(自然科学版)(中英文)(2022年2期)2022-03-27 02:08:08
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
山东交通科技(2020年2期)2020-08-13 09:24:06
知识经济·中国直销(2018年4期)2018-04-18 12:04:30
浙江工业大学学报(2017年5期)2018-01-22 02:03:36
电子制作(2017年20期)2017-04-26 06:57:35
光学精密工程(2016年3期)2016-11-07 09:03:52
通信电源技术(2016年1期)2016-04-16 04:57:35
设备管理与维修(2016年6期)2016-03-16 02:21:58
