基于GF-2数据结合多纹理特征的塑料大棚识别
2019-08-19 03:06:38吴锦玉刘晓龙柏延臣史正涛
农业工程学报 2019年12期
吴锦玉,刘晓龙,2,柏延臣,史正涛,付 卓
基于GF-2数据结合多纹理特征的塑料大棚识别
吴锦玉1,刘晓龙1,2※,柏延臣3,史正涛1,付 卓4
(1. 云南师范大学旅游与地理科学学院,昆明 650500;2. 云南师范大学高原地理过程与环境变化云南省重点实验室,昆明 650500;3. 北京师范大学地理科学学部,北京 100875;4. 生态环境部卫星环境应用中心,北京 100094)
塑料大棚在全球范围的大量使用带来经济效益,同时也引发了很多环境问题,及时准确的塑料大棚空间分布信息是农业生产和土壤治理决策的重要依据。塑料大棚的使用改变了土壤表面的光谱特性和空间结构,塑料薄膜材质的特殊性,使其反射光谱具有强烈的方向性和不确定性,因而仅依靠地物反射光谱特征难以准确识别塑料大棚。本文以GF-2影像作为单一数据源,针对塑料大棚特有的空间分布细节信息,分析不同纹理提取算法对塑料大棚识别的适用性。结果表明:1)纹理能有效提高基于遥感影像的塑料大棚识别精度;2)使用单一纹理算法识别不同空间分布结构塑料大棚的分类方案中,采用LBP (local binary pattern)纹理算法的塑料大棚识别精度均优于GLCM (gray-level co-occurrence matrix)、PSI (pixel shape index)纹理算法,其中研究区A基于LBP纹理特征的塑料大棚识别总体精度为96.85%,Kappa系数为0.95,研究区B的总体识别精度为95.58%,Kappa系数为 0.94;3)本文使用3种不同的纹理特征组合分类方案,均能提高塑料大棚的识别精度,但不同纹理特征组合算法运用到空间结构差异较大的2个区域时表现不同。加入GLCM的纹理特征组合能提高分布范围较大且聚集度高的塑料大棚识别精度(研究区A塑料大棚斑块平均面积为3.39 hm²,聚集度指数为80.64),对于塑料大棚使用面积小且分布破碎的区域识别精度提升效果不明显(研究区B塑料大棚斑块平均面积为1.37 hm²,聚集度指数为72.98)。本试验结果中研究区A的地物光谱特征、NDVI和3种纹理特征组合的大棚识别精度最高,总体识别精度和Kappa系数分别达到了98.13%和0.97,研究区B的地物光谱特征、NDVI、PSI和LBP纹理特征组合识别精度最高(总体精度为96.13%,Kappa系数为0.95)。基于影像对象的多纹理特征能够实现塑料大棚的精细识别,该方法对塑料大棚空间分布精确制图具有重要意义。
遥感;温室;GF-2数据;影像纹理;塑料大棚;面向对象分类
0 引 言
塑料大棚的使用可有效改善极端环境对农业生产的影响,实现保产增收,提高土地利用率[1],为满足日益增长的农产品需求,近年来塑料大棚在全球范围内得到广泛使用[2]。塑料大棚的使用虽然产生了显著的经济效益,但同时也改变了区域小气候和土壤理化特性,造成了不可忽视的环境污染问题。已有的研究表明,塑料大棚薄膜具有较强光学投射性、气密性和高反射率,这些特性使大棚薄膜改变了地表和大气之间的能量与水交换,最终影响地球生物化学循环、能量交换和水体质量[3-5];长期使用塑料大棚显著降低了土壤有机碳含量和pH值,加剧土壤盐碱化和养分失衡,土壤生态功能逐步退化[6]。此外,大棚使用的塑料薄膜耐腐蚀且不易降解,长期存在于土壤团聚体中的薄膜碎片导致土壤中微塑性物质含量增加[7-8],这种微塑性物质表面易吸附污染物和病原体,易被蚯蚓等无脊椎生物群吸收,从而影响土壤生物群的生长和繁殖能力[9-10]。还有研究指出,与周围裸露土壤相比,受塑料大棚影响的土壤更容易积累抗生素、重金属和邻苯二甲酸酯类等污染物,大棚作物吸收积累此类污染物后,给人类健康埋下隐患[11-12]。准确获取塑料大棚的使用范围及其时空分布信息,有助于相关部门对塑料大棚的使用和分布进行监管和优化,提高对土壤污染的防治能力。
相比于传统地面调查,遥感技术具有高效、低成本、大范围同步观测能力,在作物识别、作物估产、农业用地变化、植被重金属污染[13]等领域得到广泛应用。目前,不同空间分辨率可见光遥感影像均可用于塑料大棚识别,并取得了可观的进展。
不同空间分辨率数据在大棚识别中各具优势。相比于高空间分辨率数据,中低分辨率影像的传感器波谱特性较好,能准确捕捉地物光谱反射特性,适合宏观尺度地表覆盖类型监测,如Lu等[14]基于Landsat 5 TM影像的光谱特征,实现大面积塑料大棚的时空动态监测。但是塑料薄膜对可见光具有较高反射率和透明度,导致塑料大棚具有复杂的光谱反射特性,所以用单一的光谱特征很难准确识别塑料大棚[15]。对于这个问题,Lu等[16]根据大棚不同时期光谱特征的变化,采用MODIS数据的时间序列光谱特征和NDVI指数,通过阈值模型识别塑料大棚。此外,在影像数据中塑料大棚具有特殊的空间结构(包括纹理、尺度、形状等),不同于光谱特性,塑料大棚的空间结构与光谱分辨率无关,仅与遥感观测尺度(主要指影像空间分辨率)具有密切关系,所以,部分研究中采用塑料大棚空间分布的纹理特征弥补光谱特征的局限性,如:Aguilar等[17]基于Landsat 8 OLI时间序列和WorldView-2数据的光谱特征、纹理特征进行大棚识别。Chen等[4]基于Landsat 8 OLI数据分析不同特征在大棚识别中的贡献,结果显示光谱特征和指数信息的组合方案有更好的表现。Hasituya等[15],Agüera等[18]发现以中低分辨率数据识别大棚时,单独使用光谱特征的总体精度高于单独使用纹理特征。这是由于影像数据空间分辨率不足,地物空间细节信息有限,且受中低分辨率遥感影像混合像元影响,虽然中低分辨率遥感影像光谱信息丰富,但是其纹理信息在提高大棚识别精度上表现并不理想。因此,中低分辨率数据更适用于大棚分布的宏观监测,对大棚的精细识别则需要更高空间分辨率的遥感数据。
随着对地观测能力的提高,高空间分辨率遥感数据的获取变得简单,基于该数据获取的更加详细空间结构信息被应用于塑料大棚识别[18-19]。但基于像元的分类方法以像元为基本单位,忽略相邻像元的空间分布关系,提取影像信息的尺度较单一,而面向对象分类方法则关注与现实世界对应的空间模式,能够顾及遥感影像中待识别对象的空间特征及上下文关系[20]。对此,很多研究中对基于像元和面向对象的方法进行对比,结果表明面向对象分类方法能有效运用地物的空间信息、几何结构和纹理,甚至语义、拓扑关系等特征,消除了基于像元分类中的“椒盐”现象,地物识别精度优于基于像元的分类方法[21-23]。
然而,高分辨率影像光谱分辨率低,同时,随着分辨率的提高,同一地物内部的异质性增强,导致类内差异增大,影响分类精度[24]。因此,仅利用高空间分辨率数据的光谱特征很难满足地物精细分类的需求。长期以来,纹理特征被认为是区分具有相似光谱、不同空间分布结构特性地物的有效信息,因此针对大棚这类呈现出明显纹理结构的地物,高分影像的纹理特征便成为重要的地物识别特征[15]。高梦婕等[25]基于GF-2数据提取大棚研究中主要探讨最佳分割尺度确定和分类特征选择,结果表明光谱特征、指数特征和GLCM纹理特征是提取塑料大棚的重要特征。但针对塑料大棚特殊的纹理结构,当前方法中应用的纹理算法仅为传统的灰度共生矩阵算法,当使用更先进的纹理提取算法突出塑料大棚纹理结构特征时,是否可以有效地提高塑料大棚识别精度,尚缺乏深入研究。针对这一问题,本文探讨不同纹理识别方法在基于高空间分辨率遥感影像的塑料大棚识别中的表现,通过对不同纹理算法的对比分析,提出一种面向对象的基于高空间分辨率遥感影像多纹理特征的塑料大棚识别方法,以提高塑料大棚的识别精度。
1 研究区概况和数据处理
1.1 研究区概况
研究区位于昆明市周边,属于低纬度高原山地季风气候,年降水约1 000 mm,年平均气温15℃,年平均日照2 200 h,无霜期240 d以上[26]。研究区内常规农田改为塑料大棚集约型农田已有超过20年的历史,长期的高强度作物种植、污水污泥灌溉和过度施肥对滇池的水环境治理构成了直接威胁[7]。为保证大棚作物有最佳的温湿环境、光照条件和通风速度,该地区大棚之间留有0.5~3 m的板车道,棚头间距不少于4~5 m,大棚的朝向和形状基本一致,所以在高空间分辨率影像中呈现集中连片分布特点。研究区包含2个塑料大棚空间分布差别较大的相邻区域(研究区A和研究区B),如图1所示。其中,研究区A位于24.8° N、102.7° E,影像覆盖城乡过渡带和滇池,土地利用类型复杂,但区域内大棚使用面积较大且集中分布;研究区B位于24.5° N、102.6° E,塑料大棚零散分布。本文选取这2个具有不同空间分布格局的塑料大棚区域作为试验区,以验证本研究中大棚识别方法的鲁棒性。
1.2 数据获取和处理
本试验选用GF-2影像数据,GF-2卫星搭载2台PMS(多光谱/全色)可见光传感器,左右2台传感器成像总幅宽为45 km,侧摆能力为±35°,星下点空间分辨率为0.8 m。全色波段(450~900 nm)空间分辨率为1 m,4 个多光谱波段:蓝(450~520 nm)、绿(520~590 nm)、红(630~690 nm)、近红外(770~890 nm),空间分辨率为4 m(中国资源卫星应用中心:http://www.cresda.com/ CN/Satellite/3128.shtml)。研究区A的GF-2影像(PMS1)获取时间为2017年3月14日12∶16∶07,研究区B影像(PMS2)获取时间为2017年3月24日12∶19∶03,上述2个时段内研究区内无云、雾覆盖。A、B研究区影像成像时的太阳方位角分别为148.746°和147.105°,该时段研究区内大棚覆盖无变化,影像获取的时相差对大棚识别影响较小。
为消除大气对地物光谱反射的影响,本文对GF-2一级数据产品进行辐射定标和大气校正。辐射定标中将像元灰度值转换为辐亮度值(见式(1))[27],定标参数由中国资源卫星应用中心提供(http://www. cresda.cn/CN/Downloads/dbcs/index.shtml)。大气校正采用FLAASH模型。为了提高数据的光谱和空间分辨率,本文采用NNDiffuse Pan Sharpening算法融合GF-2多光谱和全色波段,融合后得到空间分辨率为1 m的(R、G、B、NIR波段)影像(如图1)。

结合2016年12月的无人机实测数据,对2个研究区进行人工目视解译,生成地面“真值”样本集,用于训练分类器和分类结果的精度评价。无人机(DJI Phantom 3 Advanced)作业时飞行高度为120 m,地面分辨率为5 cm。样本包含的地类分别为水体、塑料大棚、植被和其他(建筑用地、道路和未利用地)。样本以2∶1的比例划分为训练样本集和验证样本集(如表1所示)。由于研究区A内土地利用类型复杂,大棚的使用面积大于研究区B,因此在研究区A选取了较多的样本点而研究区B样本较少。研究区及样本分布见图1。

表1 样本点数量及分布
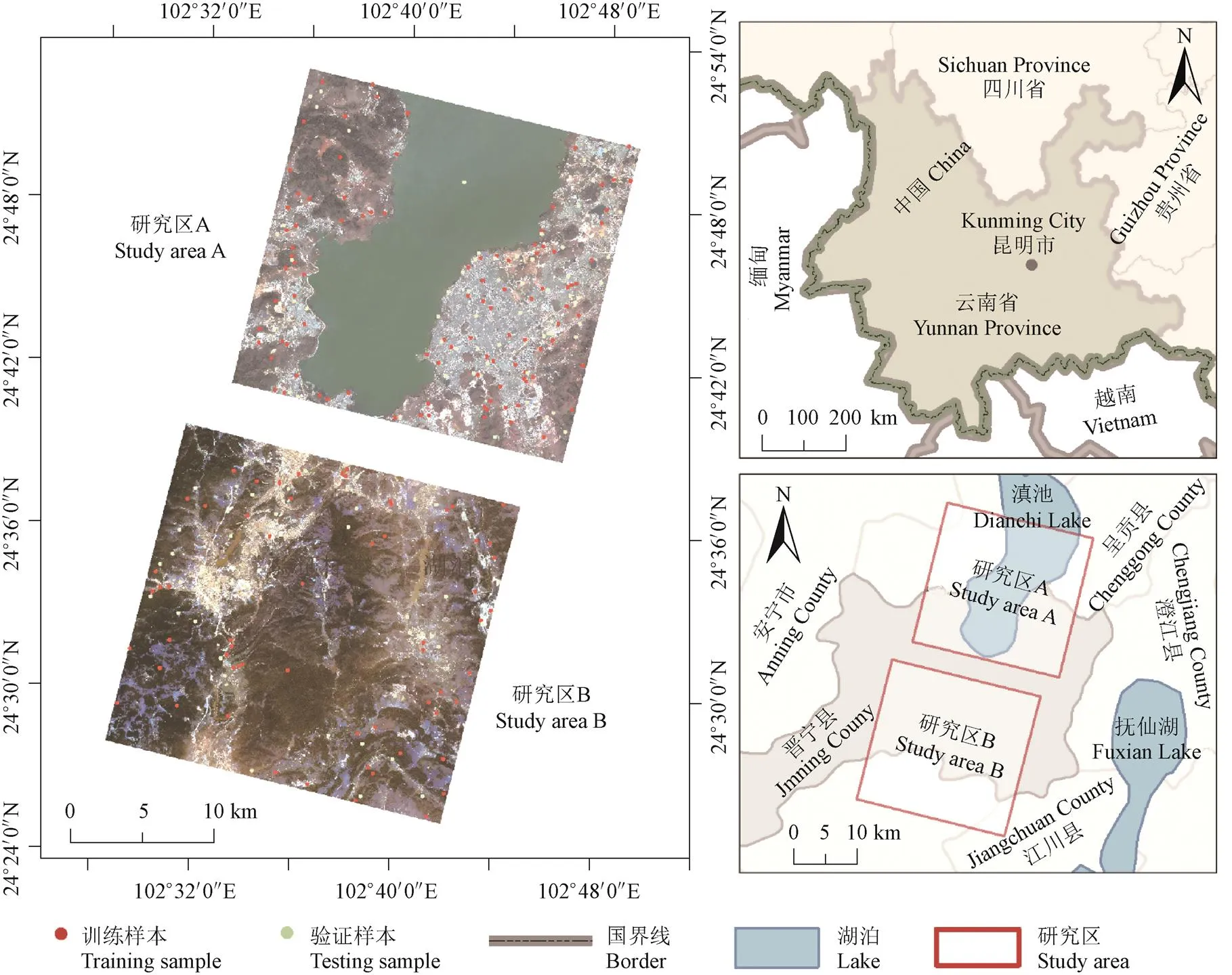
图1 研究区域及样本点分布
2 研究方法
2.1 影像分割
地学面向对象影像分析(GeOBIA:geographic object-based image analysis)以影像对象作为影像分析的基本单位,影像对象的实质是相似像元的集合(即地理空间实体,如本文的塑料大棚)[28]。如何通过影像分割准确地生成空间实体的影像对象,对地物识别精度有直接的影响[29-30]。Baätz提出[31]的多尺度分割算法综合考虑遥感影像的光谱、空间、上下文、长宽比和纹理等信息,该方法被广泛用于遥感影像分割。影响多尺度分割算法分割结果的主要参数有分割尺度、形状指数、紧密度指数,其中分割尺度根据分割对象的大小进行调节,是最重要的因素[32]。
本试验采用eCognition Developer 9.0软件中的多尺度分割算法进行遥感影像分割。分割过程中,多尺度分割算法分割尺度取值范围设置为50~200,步长为10;形状指数取值范围为0.1~1,步长取0.1;紧密度指数取值范围为0.1~1,步长为0.1。虽然高空间分辨率影像有利于地物细节的识别,但同一地物内部的差异性也随空间分辨率的增高而增高。针对异质地表的分割结果易出现过分割或欠分割的情况,Liu等[33]研究表明,过分割对面向对象分类的影响在可接受范围内,相反欠分割会严重影响分类结果精度。通过对比分析,本试验得到的最佳分割结果的多尺度分割算法参数分别为:分割尺度100、形状指数0.6、紧密度指数0.9。虽然上述参数得到的分割结果存在部分过分割现象,但分割边界与真实地类边界接近且确保了每个分割对象均接近同质对象。
2.2 塑料大棚识别特征
由于塑料薄膜具有透光特性,部分大棚的反射光谱中包含棚内植被反射信息,这将导致大棚与低覆盖度植被混淆,为了区分2者,本文使用归一化植被指数(NDVI,normalized difference vegetation index)[34]增强植被信息。一般情况下,植被区的NDVI值大于0,非植被区的NDVI值小于0,但由于研究区A内的滇池水体富营养化严重,水体叶绿素浓度较高,因此研究区A中水体NDVI值出现大片偏高区域,这一现象导致常用的水体识别指数对水体识别产生较大误差。针对这一问题,本试验对研究区A影像进行主成分变换并设定最佳阈值单独提取水体;研究区B内水体较少,因此直接参与分类。
Haraclick等[35]提出的灰度共生矩阵(gray-level co-occurrence matrix,GLCM)纹理提取算法,依据兴趣区内不同的空间结构和纹理生成与之对应的共生矩阵,同时可以导出14种纹理特征指标用于定量分析纹理,其中常用的指标有均值、方差、同质性、对比度、熵、相关性,通过这些指标能有效区别类间的空间结构差异[36]。本试验基于预处理后的全色影像提取GLCM纹理特征,为避免窗口边缘效应的影响,保证所得纹理信息稳定且清晰,并依据当地大棚设置的预留宽度,将数据降维至64个灰度级,移动窗口设置为5×5,移动步长为3个像元。采用常用的5个指标作为GLCM纹理特征,分别与影像光谱特征和NDVI组成5组分类方案,在SVM分类器中进行分类,其中GLCM均值与光谱特征、NDVI组合的方案分类精度最高,总体精度为93.93%,Kappa系数为0.91,所以选择均值作为GLCM提取大棚纹理信息。常用GLCM纹理指标的分类精度对比情况如表2所示。

表2 GLCM纹理提取算法常用指标分类精度
局域二值模型(local binary pattern,LBP)[37]具有较强的纹理鉴别能力且计算简单,并被改进为多尺度LBP[38]、旋转不变LBP[39]等多种纹理分析模型。旋转不变性是指在图像发生一定角度的旋转后,图像内的对象没有改变,但是常用的纹理算法在对旋转后的图像进行纹理计算时,其纹理特征值发生了改变,这不利于图像中运动目标的识别。针对这一问题,Mäenpää等[39]对LBP做了如下定义:

像元形状指数(pixel shape index,PSI)[40]根据中心像元及其不同方向邻域上的光谱相似性,生成多条长短各异的方向线描述该邻域的形状特征和邻域中心像元的形状指数。PSI通过计算具有相似光谱特性的相邻像元组维数,表征像元的空间上下文特征,通过扩大不同形状区域之间的特征值,突出高分辨率影像的空间细节信息。PSI共有3个参数:同质性阈值(1)、空间扩展阈值(2)、方向线总数()。1表示同质性区域内中心和领域像元的最大光谱差异,用平均类间距离的平方根表示,高分辨率数据类内方差较大,本试验设1为90。2表征方向线延伸的长度限制,为尺度因子,本试验2取30,能较好反映出形状检测的目标尺寸。控制方向线的夹角和疏密程度,表示PSI对领域形状的探测能力,值设为20已能达到预期的探测能力,设置更大的方向数只会增加计算量,不能提高精度。
2.3 支持向量机分类器

2.4 分类方案
为分析纹理特征对面向对象分类的影响,并评价不同纹理提取模型对识别塑料大棚的表现,本文提出8组分类方案,每个分类方案中各特征数据的空间分辨率均为1 m,具体分类方案及其特征组合如表3所示。
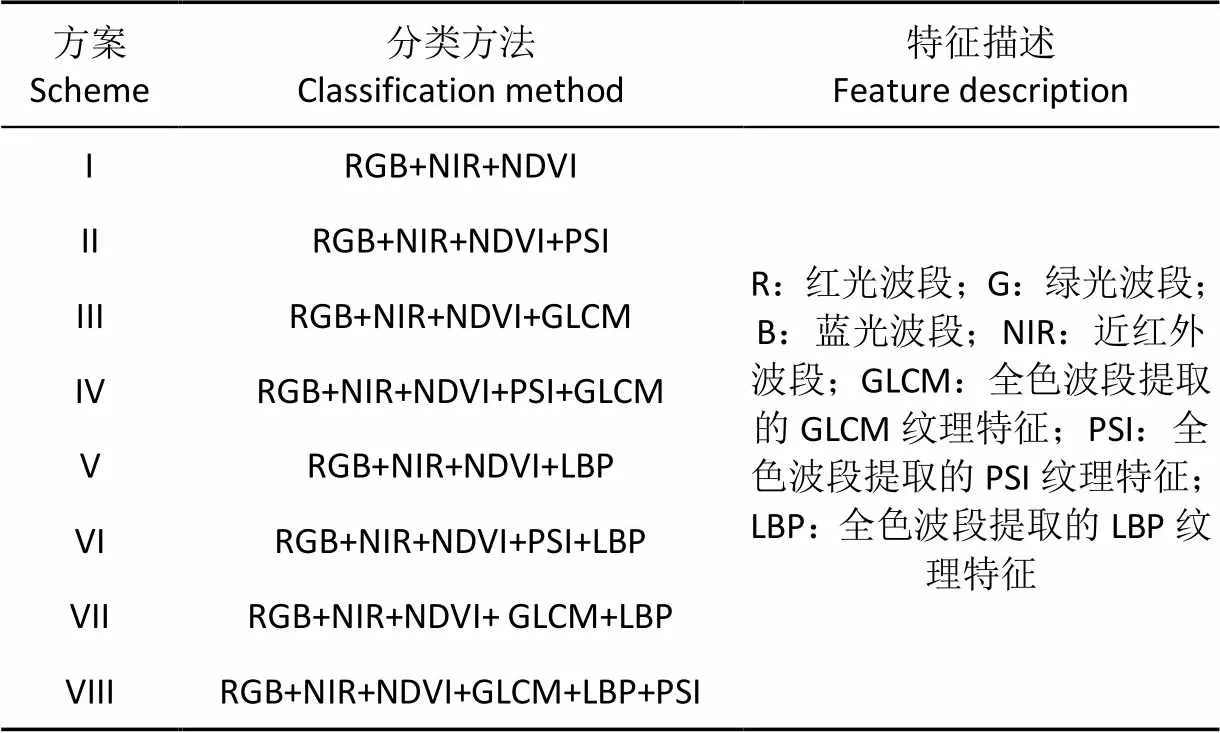
表3 不同纹理特征组合的分类方案
2.5 精度验证
目前对分类结果精度分析最常用的方法是混淆矩阵法,该方法通过混淆矩阵计算分类结果的生产者精度(PA,producer accuracy)(式(4)),用户精度(UA,user accuracy)(式(5)),总体精度(OA,overall accuracy)(式(6))和Kappa系数(式(7))[44],分析分类结果的精度和可靠性。
3 研究方法
3.1 纹理特征提取分析
图2为通过GLCM、PSI和LBP算法提取的地物纹理特征结果,3种算法提取的纹理特征能够体现不同地物纹理方向及纹理特征值的差异,其中基于GLCM算法提取的纹理存在显著的类内异质性且纹理清晰度低,如图 2b所示。基于PSI算法提取的纹理突出影像的各向异性,纹理分布也较清晰,如图2c所示。在3种算法中,使用LBP算法提取的纹理特征(图2d)最清晰,能够体现影像中地物纹理的细微特征。
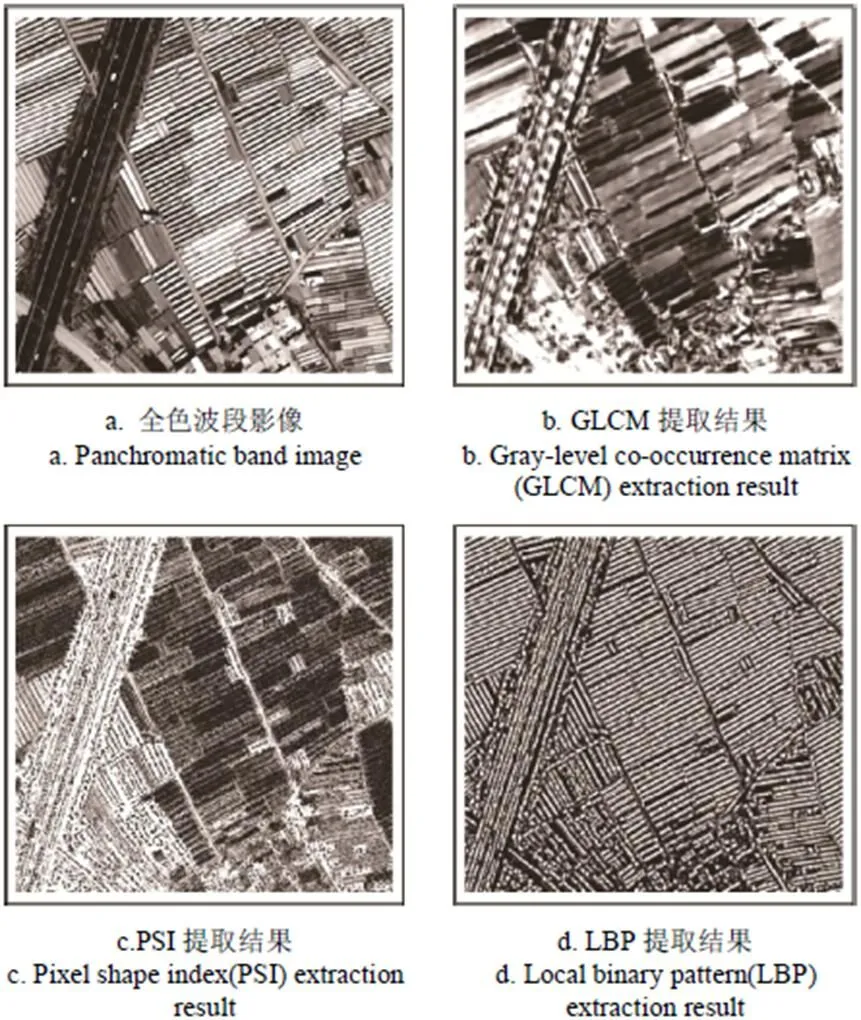
图2 不同算法提取的地物纹理特征
为分析不同特征组合对地物可分性影响,选用距离(jeffreys-matusitadistance)作为可分性指标[45],当特征类别服从正态分布时,距离用公式(8)表示[46-47]。
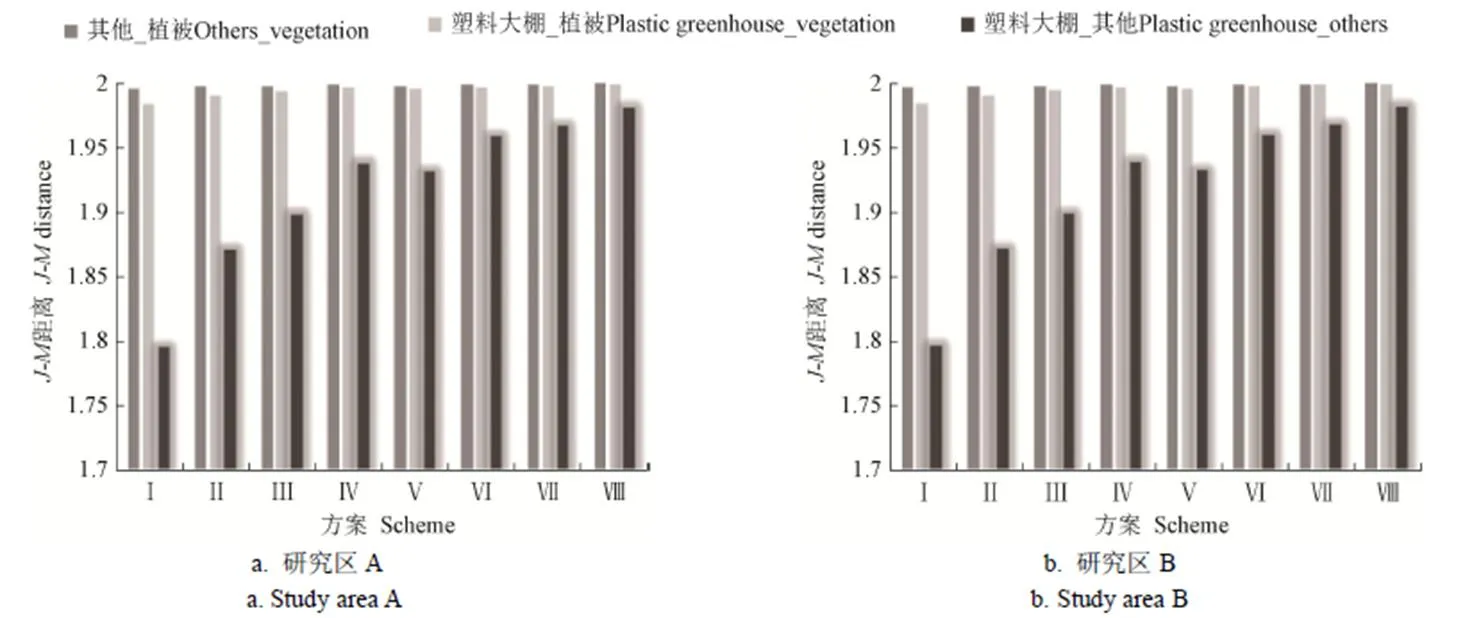
图3 研究区A、B不同分类方案各类别间J-M距离
3.2 分类结果分析
2个研究区的8种方案的分类结果如图4、图5所示,表4为不同方案的分类精度。
从图4、图5和表4看出,在塑料大棚空间格局不同的2个区域中,未加入纹理特征的方案I分类精度最低:研究区A的OA和Kappa系数分别为92.69%和0.89;研究区B的OA和Kappa系数分别为92.22%和0.89,与方案I相比,使用纹理特征的各方案分类精度均有不同程度的提升。其中,加入单个纹理信息的方案中,LBP(方案V)提升分类精度最显著。方案V与方案I相比,研究区A的总体精度(OA)和Kappa系数分别是96.85%和0.95,OA和Kappa系数分别提高了4.16个百分点和0.06;研究区B的OA和Kappa系数分别是95.58%和0.94,OA和Kappa分别提高了3.36个百分点和0.05。PSI和GLCM分类精度变化较小,对比分类精度,加入纹理特征组合的分类方案识别精度高。研究区A中加入GLCM、PSI和LBP这3种纹理特征时(方案VIII)分类精度达到最佳,OA和Kappa系数分别为98.13%和0.97,与方案I相比OA和Kappa系数分别提升了5.44个百分点和0.08,研究区B中使用PSI的方案VI最佳,OA和Kappa系数分别为96.13%和0.95,与方案I相比OA和Kappa系数分别提高了3.91个百分点和0.06。其中研究区B中的方案VIII与方案VI的分类精度相同,对比分类效率,使用2种纹理组合的方案VI优于3种纹理组合的方案VIII,因此研究区B中最佳分类方案为方案VI。
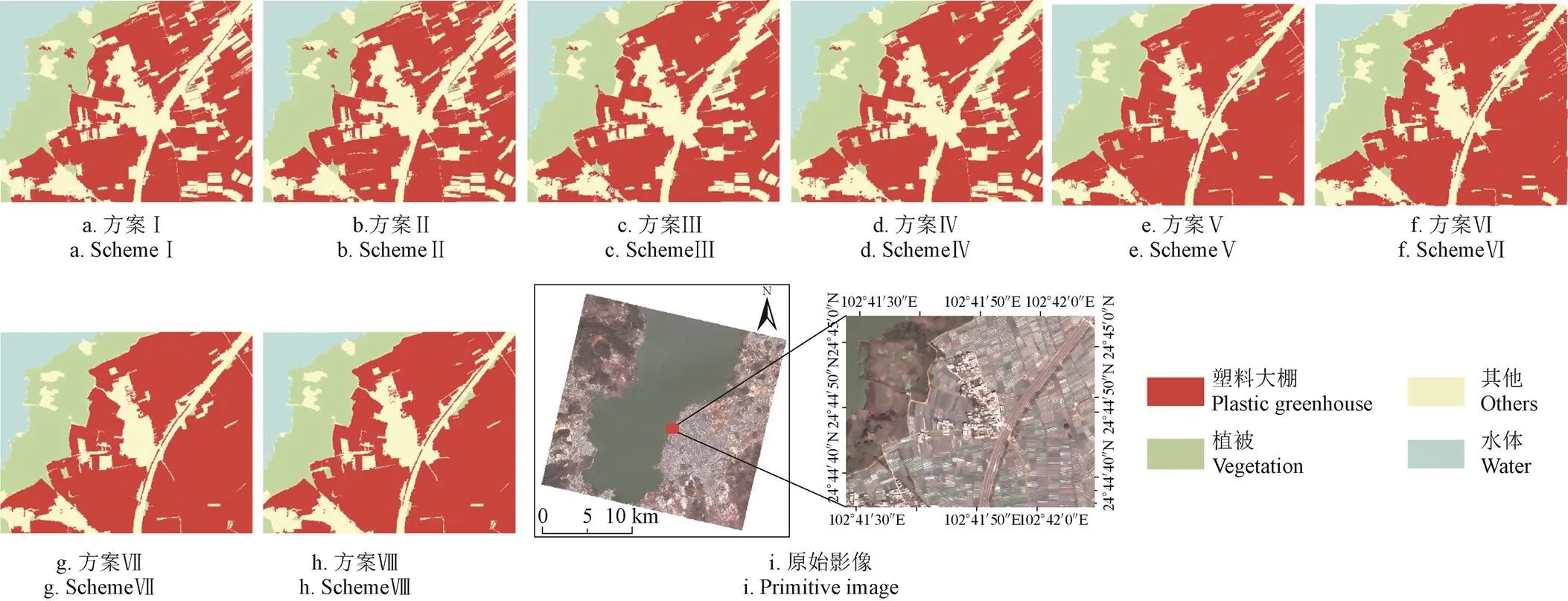
图4 研究区A影像不同分类方案分类结果
此外,不同纹理特征的使用,对塑料大棚、其他、水体和植被的识别精度影响不同。在8个分类方案中塑料大棚的PA、UA值变化较大:研究区A中未加入纹理特征的方案I,塑料大棚的PA、UA精度最低,分别为78.29%、90.62%,研究区B中大棚的PA、UA为80.49%、89.47%。与方案I相比,加入纹理特征的7个方案中大棚的PA、UA均有不同程度提高,在研究区A中,同时加入3种不同纹理特征的分类方案VIII表现最佳,PA提升了18.18个百分点,UA提升了7.31个百分点。研究区B中加入2种纹理特征的分类方案VI表现最佳,与未加入纹理特征的分类方案I相比,PA提升了10.18个百分点,UA提升了10.21个百分点。因此,不同纹理算法对大棚识别的精度影响不同。
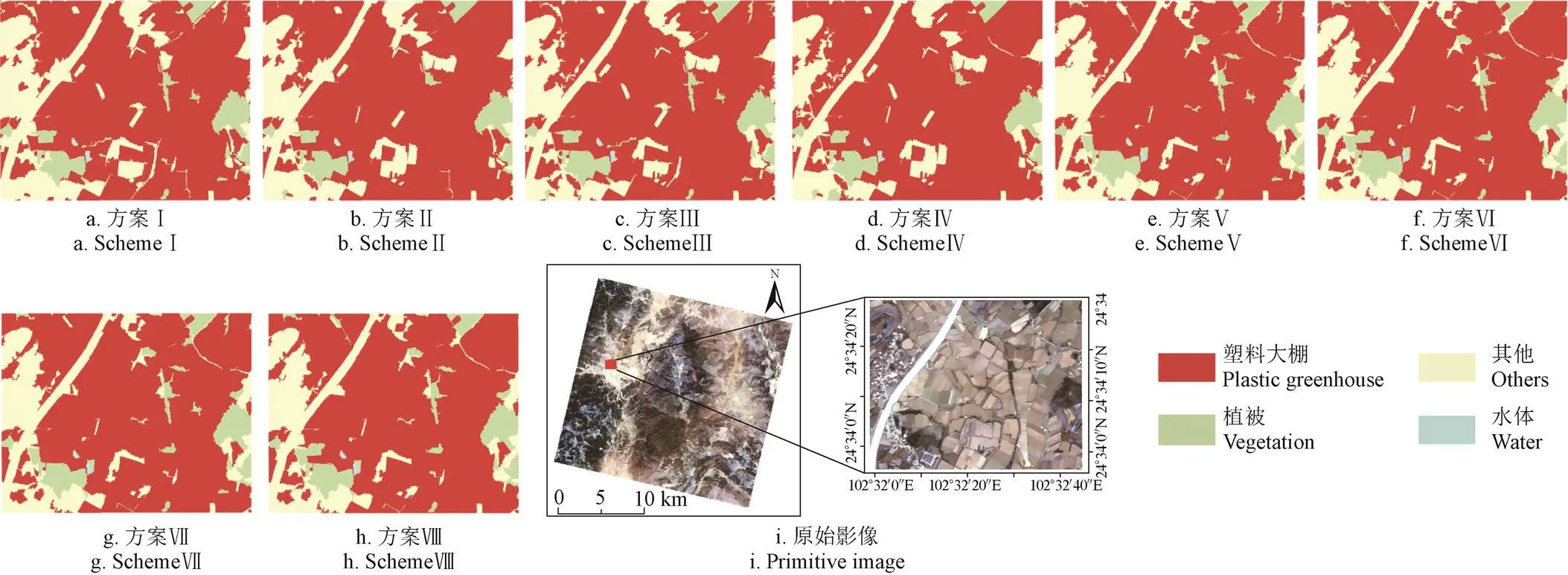
图5 研究区B影像不同分类方案分类结果

表4 不同分类方案的分类精度
注:PA为生产者精度,%;UA为用户精度,%。
Note:PA means producer accuracy, %; UA means user accuracy, %.
虽然在不同区域加入纹理特征能提升分类精度,有效区分大棚和其他类别,但是各纹理特征组合方案在2个研究区中的分类结果存在差异。对比方案II和方案IV,研究区A中加入PSI、GLCM的纹理特征组合的分类精度比加入PSI单一纹理特征的精度高,总体精度提高了1.47个百分点,Kappa系数提高了0.03;研究区B中2 个分类方案的精度差别不大,总体精度仅提高0.25个百分点,Kappa系数仅提高0.01。对比方案V和方案VII,研究区A中加入LBP、GLCM纹理特征组合的分类精度比加入LBP单一纹理特征的精度高,总体精度提高了0.94个百分点,Kappa系数提高了0.02;研究区B中这2 个分类方案的精度没有差异。对比方案VI和方案VIII,研究区A中加入PSI、LBP、GLCM的纹理特征组合的分类精度比加入PSI、LBP的纹理特征组合的精度高,总体精度提高了1.12个百分比,Kappa系数提高了0.01;研究区B中这2个方案的分类精度没有差异。此外,由表4可知,使用同一分类方案对2个研究区进行分类,研究区A的分类精度高于研究区B。
针对上述2个研究区分类结果的差异,本文运用景观异质性分析研究区塑料大棚分布的空间异质性对分类结果精度的影响。以最优分类结果为参考数据,选用斑块平均面积(average patch area, AREA_MN)、聚集度指数(aggregation index, AI)对景观空间格局及其分布情况进行定量分析。AREA_MN(hm²)表征景观类型的破碎化程度,综合测度景观类型和数量[48]。AI(无量纲)描述景观内不同景观类型的团聚程度,取值范围0~100,值越大表示景观类别分布越集中[49-51]。采用Fragstas软件计算上述2个指数的结果如表 5所示,研究区A中,大棚、其他和植被的斑块平均面积和聚集度指数值相差不大,3种地类的斑块平均面积仅在3~5 hm²之间,但聚集度指数均在80以上,表明塑料大棚面积虽小但分布的聚集程度较高,呈集中分布特征。研究区B中植被的斑块平均面积、聚集度指数最大,分别为17.21 hm²和90.60,表明植被是研究区B中的主要地表覆盖类型,其他类别次之,大棚和水体的2个指数值最小,斑块平均面积小于1.5 hm²,聚集度指数小于73,表明大棚和水体面积小且分布零碎。
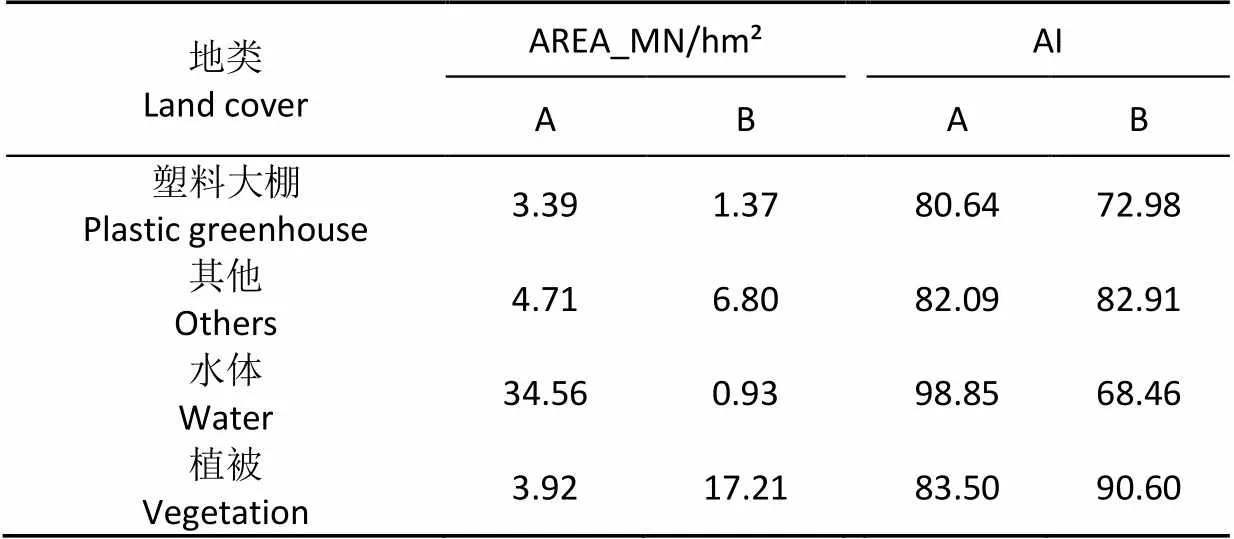
表5 研究区A、B的景观格局指数
注:AREA_MN为斑块平均面积,hm²;AI为聚集度指数。
Note:AREA_MN means average patch area, hm²; AI means aggregation index.
综合2个研究区的地类景观破碎度和塑料大棚分类结果可知,加入纹理特征对空间分布集中且面积较大的塑料大棚识别精度高于分布零碎的情况;聚集度高的区域加入GLCM的纹理特征组合能提升识别精度,但对塑料大棚使用面积小且分布破碎的区域(如本研究中的研究区B)影响较小。
4 结 论
本文以GF-2作为单一数据源,针对大棚特殊的空间分布结构,提出了一种面向对象的基于高分辨率影像对象纹理特征组合的塑料大棚识别方法,分别用GLCM、PSI、LBP纹理提取算法提取了影像纹理特征。不同纹理特征对塑料大棚识别精度影响的分析结果表明:
1)GF-2数据的空间纹理信息能够有效弥补光谱特征的局限,提高大棚的识别精度。GF-2数据光谱波段仅有可见光和近红外波段,但空间分辨率较高,能够清晰地捕捉地物空间细节信息,适用于识别具有特殊纹理特征的地类。大棚覆盖薄膜的特性导致地物光谱特征变得复杂,使得塑料大棚与其他(建筑用地、道路、未利用地)地类产生严重混淆,加入纹理特征能有效提高大棚与其他地类(建筑用地、道路、未利用地)的区分度。
2)面向对象方法的大棚识别中,不同算法提取的纹理特征对提高大棚识别精度的贡献不同。本文使用LBP、PSI和GLCM纹理提取算法在2个空间格局不同的研究区分类结果显示,单一纹理特征中的LBP表现最佳,组合地物光谱特征、NDVI的大棚识别精度最高。纹理组合方案中,研究区A中光谱特征、NDVI和3种不同纹理特征组合的大棚识别精度最高,总体精度为98.13%,Kappa系数为0.97,研究区B中光谱特征、NDVI和PSI、LBP纹理特征组合的大棚识别精度最高,总体精度为96.13%,Kappa系数为0.95,实现了塑料大棚的高精度精细识别。
3)本文选用2个大棚空间分布格局不同的区域作为研究区,对比2个研究区的分类结果表明:加入GLCM的纹理特征组合能提升大范围使用且聚集度高的大棚识别精度,但对于面积小且分布破碎的塑料大棚识别精度提升效果并不显著。同时,研究区B中各分类方案计算得到的分类精度总体低于研究区A,所以地物的空间异质性对地物识别精度影响很大。
[1] Godfray H C, Beddington J R, Crute I R, et al. Food security: the challenge of feeding 9 billion people[J]. Science, 2010, 327(12): 812-818.
[2] Ying Q, Hansen M C, Potapov P V, et al. Global bare ground gain from 2000 to 2012 using Landsat imagery[J]. Remote sensing of environment, 2017, 194(30): 161-176.
[3] Steinmetz Z, Wollmann C, Schaefer M, et al. Plastic mulching in agriculture. Trading short-term agronomic benefits for long-term soil degradation[J]. Science of the Total Environment, 2016, 550(15): 690-705.
[4] Chen Z. Mapping plastic-mulched farmland with multi- emporal Landsat-8 data[J]. Remote Sensing, 2017, 9(6): 557-584.
[5] 孙怀卫,杨金忠,王修贵. 塑料大棚气流场模拟及作物蒸腾量计算[J]. 农业工程学报,2011,27(11):236-241. Sun Huaiwei, Yang Jinzhong, Wang Xiugui. Numerical simulation of airflow pattern and calculation of crop transpiration in plastic greenhouse[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(11): 236-241. (in Chinese with English abstract)
[6] Zhang G S, Hu X B, Zhang X X, et al. Effects of plastic mulch and crop rotation on soil physical properties in rain-fed vegetable production in the mid-Yunnan plateau, China[J]. Soil & Tillage Research, 2015, 145(1): 111-117.
[7] Zhang G S, Liu Y F. The distribution of microplastics in soil aggregate fractions in southwestern China[J]. Science of the Total Environment, 2018, 642(11): 12-20.
[8] Andrady A L. Microplastics in the marine environment[J]. Marine Pollution Bulletin, 2011, 62(8): 1596-1605.
[9] Huerta Lwanga E, Gertsen H, Gooren H, et al. Microplastics in the terrestrial ecosystem: implications for Lumbricus terrestris (Oligochaeta, Lumbricidae)[J]. Environmental science & technology, 2016, 50(5): 2685-2691.
[10] Hodson M E, Duffushodson C, Clark A, et al. Plastic bag derived-microplastics as a vector for metal exposure in terrestrial invertebrates[J]. Environmental Science & Technology, 2017, 51(8): 4714-4721.
[11] Yanxia Z, Biao H, Marianne T, et al. One overlooked source of phthalate exposure-oral intake from vegetables produced in plastic greenhouses in China[J]. Science of the total environment, 2018, 642(15): 1127-1135.
[12] 陈碧华,杨和连,周俊国,等. 大棚菜田种植年限对土壤重金属含量及酶活性的影响[J]. 农业工程学报,2012,28(1):213-218. Chen Bihua, Yang Helian, Zhou Junguo, et al. Effect of cultivating years of vegetable field on soil heavy metal content and enzyme activity in plastic shed[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28 (1): 213-218. (in Chinese with English abstract)
[13] Banerjee B P, Raval S, Hao Z, et al. Health condition assessment for vegetation exposed to heavy metal pollution through airborne hyperspectral data[J]. Environmental Monitoring & Assessment, 2017, 189(12): 604-615.
[14] Lu L, Di L, Ye Y. A decision-tree classifier for extracting transparent plastic-mulched landcover from landsat5 TM images[J]. IEEE Journal of Selected Topics in Applied Earth Observations & Remote Sensing, 2014, 7(11): 4548-4558.
[15] Hasituya, Chen Z, Wang L, et al. Monitoring Plastic-mulched farmland by landsat8 OLI imagery using spectral and textural features[J]. Remote Sensing, 2016, 8(4): 353-369.
[16] Lu L, Hang D, Di L. Threshold model for detecting transparent plastic-mulched landcover using moderate- resolution imaging spectroradiometer time series data: a case study in southern Xinjiang, China[J]. Journal of Applied Remote Sensing, 2015, 9(1): 97094-97108.
[17] Aguilar M A, Vallario A, Aguilar F J, et al. Object-based greenhouse horticultural crop identification from multi-temporal satellite imagery: A case study in Almeria, Spain[J]. Remote Sensing, 2015, 7(6): 7378-7401.
[18] Agüera F, Aguilar F J, Aguilar M A. Using texture analysis to improve per-pixel classification of very high resolution images for mapping plastic greenhouses[J]. ISPRS Journal of Photogrammetry & Remote Sensing, 2008, 63(6): 635-646.
[19] Hasituya, Chen Z, Wang L, et al. Selecting appropriate spatial scale for mapping plastic-mulched farmland with satellite remote sensing imagery[J]. Remote Sensing, 2017, 9(3): 265-288.
[20] Blaschke T. What's wrong with pixels? Some recent developments interfacing remote sensing and GIS[J]. GeoBIT/GIS, 2001, 6(1): 12-17.
[21] Blaschke T. Object based image analysis for remote sensing[J]. ISPRS Journal of Photogrammetry & Remote Sensing, 2010, 65(1): 2-16.
[22] Duro D C, Franklin S E, Monique G Dubé. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of
agricultural landscapes using SPOT-5 HRG imagery[J]. Remote Sensing of Environment, 2012, 118(6): 259-272.
[23] 胡荣明,魏曼,杨成斌,等. 以SPOT5遥感数据为例比较基于像素与面向对象的分类方法[J]. 遥感技术与应用,2012,27(3):366-371. Hu Rongming, Wei Man, Yang Chengbin, et al. Taking SPOT5 remote sensing data for example to compare pixel-based and object-oriented classification[J]. Remote Sensing Technology And Application, 2012, 27(3): 366-371. (in Chinese with English abstract)
[24] 刘晓龙. 集成多源遥感数据的植被类型分类方法研究[D]. 北京:北京师范大学,2015. Liu Xiaolong. Study of Multi-Source Remote Sensing Data Integrated Classification Method of Vegetation[D]. Beijing: Beijing Normal University, 2015. (in Chinese with English abstract)
[25] 高梦婕,姜群鸥,赵一阳,等. 基于GF-2遥感影像的塑料大棚提取方法对比[J]. 中国农业大学学报,2018,23(8):125-134. Gao Mengjie, Jiang Qunou, Zhao Yiyang, et al. Comparison of plastic greenhouse extraction method based on GF-2 remote-sensing imagery[J]. Journal of China Agricultural University, 2018, 23(8): 125-134. (in Chinese with English abstract)
[26] 张薇,刘淼,戚与珊. 基于CLUE-S模型的昆明市域土地利用预案模拟[J]. 生态学杂志,2014,33(6):1655-1662. Zhang Wei, Liu Miao, Qi Yushan. Land-use scenarios simulation based on the CLUE-S model in Kunming[J]. Chinese Journal of Ecology, 2014, 33(6):1655-1662. (in Chinese with English abstract)
[27] 童庆禧,张兵,郑兰芬. 高光谱遥感——原理、技术与应用[M]. 北京:高等教育出版社,2006.
[28] Blaschke T. Object based image analysis for remote sensing[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2010, 65(1): 2-16.
[29] Zhang B, Song M, Zhou W. Exploration on method of auto-classification for main ground objects of Three Gorges Reservoir area[J]. Chinese Geographical Science, 2005, 15(2): 157-161.
[30] Hay G J, Castilla G, Wulder M A, et al. An automated object-based approach for the multiscale image segmentation of forest scenes[J]. International Journal of Applied Earth Observations & Geoinformation, 2005, 7(4): 339-359.
[31] Baätz M, Schäpe A, Strobl J, et al. Multiresolution segmentation: An optimization approach for high quality multi-scale image segmentation[J]. Angewandte Geographische Informations-Verarbeitung XII, 2000: 12-23.
[32] 杨盼盼. 基于高分辨率遥感影像纹理特征的面向对象植被分类方法研究[D]. 昆明:云南师范大学,2017. Yang Panpan. Reaesrch on Object-Oriented Vegetation Classification Method Based on Texture Feature of High Resolition Remote Sensting Image[D]. Kunming: Yunnan Normal University, 2017. (in Chinese with English abstract)
[33] Liu D, Xia F. Assessing object-based classification: advantages and limitations[J]. Remote Sensing Letters, 2009, 1(4): 187-194.
[34] Rouse J W J, Haas R H, Schell J A, et al. Monitoring Vegetation Systems in the Great Plains with Erts[J]. Nasa Special Publication, 1973, 351(1): 309-317.
[35] Haraclick R M. Texture features for image classification[J]. Studies in Media and Communication, 1973, 3(6): 610-621.
[36] Kaplan L M, Kuo C C J. Extending self-similarity for fractional Brownian motion[J]. IEEE Transactions on Signal Processing, 1994, 42(12): 3526-3530.
[37] Ojala T, Harwood I. A comparative study of texture measures with classification based on feature distributions[J]. Pattern Recognition, 1996, 29(1): 51-59.
[38] Ojala T, Pietikäinen M, Mäenpää T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2002, 24(7): 971-987.
[39] Mäenpää T, Pietikäinen M. Texture analysis with local binary patterns[J]. Handbook of Pattern Recognition & Computer Vision, 2005, 354 (6): 115-118.
[40] 黄昕,张良培,李平湘. 融合形状和光谱的高空间分辨率遥感影像分类[J]. 遥感学报,2007,11(2):193-200. Huang xin, Zhang Linpei, Li Peixiang. Classification of high Spatial resolution remotely sensed imagery based on the fusion of spectral and shape features[J]. Journal of remote sensng, 2007, 11(2): 193-200. (in Chinese with English abstract)
[41] V. Vapnik, S. Kotz. Estimation of dependences based on empirical data[M]. New York: Springer-Verlag, 1982.
[42] Milan Sonka, Vaclav Hlavac, Roger Boyle. Image processing, analysis, and machine vision[M]. Mason, OH: Thomson, 2007.
[43] Koc-San D. Evaluation of different classification techniques for the detection of glass and plastic greenhouses from WorldView-2 satellite imagery[J]. Journal of Applied Remote Sensing , 2013, 7(1): 73551-73553.
[44] Russell G. Congalton, Kass Green. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices, Second Edition (Mapping Science)[M]. [S.l.]: CRC Press, 2008.
[45] Hofmann W. Remote sensing: The quantitative approach[J]. Earth-Science Reviews, 1980, 16(6): 386-387.
[46] John A. Richards, Xiuping Jia. Remote Sensing Digital Image Analysis: An Introduction [M]. [S.l.]: Springer, 2005.
[47] Kailath T. The divergence and bhattacharyya distance measures in signal selection[J]. IEEE Transactions on Communication Technology, 1967, 15(1): 52-60.
[48] 余新晓,李秀彬,夏兵. 森林景观格局与土地利用/覆被变化及其生态水文响应[M]. 北京:科学出版社,2010.
[49] 崔闪闪,刘庆,王静. 空间粒度变化对县域农村居民点景观指数的影响-以江苏省大丰市为例[J]. 中国农业资源与区划,2017,38(3):20-26. Cui Shangshang. Liu Qing, Wang Jing. Effects of changing grain size on landscape indices of rural settlement at county scale of Binhai development zone-A case study of Dafeng county in Jiangsu province[J]. Chinese Journal of Agricultural Resources and Regional Planning, 2017, 38(3): 20-26. (in Chinese with English abstract)
[50] 冀亚哲,张小林,吴江国,等. 多空间粒度下镇江市土地利用景观格局差异[J]. 中国土地科学,2013,27(5):54-63. Ji Yazhe, Zhang Xiaolin, Wu Jiangguo, et al. Research on the differences of landscape patterns under several spatial granularities in Zhenjiang City[J]. China Land Sciences, 2013, 27(5): 54-63. (in Chinese with English abstract)
[51] 赵玉涛,余新晓,关文彬. 景观异质性研究评述_赵玉涛[J]. 应用生态学报,2002,13(4):495-500.Zhao Yutao, Yu Xinxiao, Guan Wenbin. Review on landscape terogeneity[J]. Chinese Journal of Applid Ecology, 2002, 3(4): 495-500. (in Chinese with English abstract)
Plastic greenhouse recognition based on GF-2 data and multi-texture features
Wu Jinyu1, Liu Xiaolong1,2※, Bo Yanchen3, Shi Zhengtao1, Fu Zhuo4
(1.,,650500,; 2.,650500,; 3.,,100875,;4.,100094,)
The wide use of plastic greenhouses in the word has brought economic benefits, but also caused many environmental problems. Accurate and timely acquisition of spatial distribution information of plastic greenhouse is of great significance to agricultural production and soil management. The use of plastic greenhouse has changed the structure of soil, thus changing the surface spectral characteristics of the soil. Because of the particularity of the plastic film material, the reflection spectrum has strong directionality and uncertainty, so it is difficult to identify plastic greenhouse accurately only depending on the reflectance spectrum characteristics of ground objects. In this paper, Kunming City, Yunnan Province is taken as the research area, using GF-2 image as a single data source, the multi-scale segmentation method is used to obtain the image object efficiently and accurately. According to the detailed spatial information of plastic greenhouse, the applicability of three image object-based texture extraction algorithms, namely GLCM(gray-level co-occurrence matrix), LBP(local binary pattern) and PSI(pixel shape index) for plastic greenhouse identification is analysed and tested. In addition, different texture features are combined with spectral features and NDVI index to form different classification schemes, to explore which one would be the best combination of texture features for identification of plastic greenhouses. In order to explore the robustness of the method, different texture feature combination schemes are applied in the study areas. The results of SVM (support vector machine) classifier are evaluated by confusion matrix. The results show that the overall combination schemes of the two research areas with different landscape patterns have the same trend. The combination of spectral features and NDVI index can accurately identify the scattered waters in each of the two study areas. For plastic greenhouses and impervious surfaces with similar reflectance spectra, adding texture features can make up for limitation of spectral characteristics and improve the overall accuracy. The phenomena of homologous or homologous spectra in spectral features of high spatial resolution image can effectively improve the discrimination between plastic greenhouse and impervious surface. Texture features can significantly improve the identification accuracy of plastic greenhouse following the object-based image classification frame. In the classification scheme of plastic greenhouses with different spatial distribution structures, the LBP (local binary pattern) texture algorithm has the best recognition accuracy, the overall accuracy of study area A is 96.85%, Kappa coefficient is 0.95, and that of study area B is 95.58% and 0.94. Landscape fragment analysis (landscape fragmentation index area mean index, aggregation indices) of the two different study areas showed that the plastic greenhouses in study area A are more fragmented than study area B (area mean indices are 3.39 hm² and 1.37 hm², aggregation indices are 80.64 and 72.98 for plastic greenhouses in study area A and B, respectively).The results of fragmentation are consistent with those of classification, and the accuracy of landscape classification with more space fragments is lower (the highest overall classification accuracy for study area A and B are 98.13% and 96.13%, respectively, the PA(producer accuracy) and UA(user accuracy) are 96.47% and 97.93% for study area A, and 90.67%, 99.68% for study area B). The results show that texture features based on image objects can improve the recognition accuracy of small-scale plastic greenhouse. This is of great significance to the accurate mapping of the distribution of plastic greenhouses.
remote sensing; greenhouse; Gf-2 data; image texture features; plastic greenhouse object-based classification
2018-11-05
日期:2019-04-19
国家重点研发计划项目(2016YFB0501502);云南省青年基金(2016FD021);云南省水利厅水利科技项目(2014003)
吴锦玉,主要从事高分植被识别研究。Email:jy_wu_yncj@163.com
刘晓龙,博士,讲师,主要从事高分辨率热带植被遥感的理论和应用研究。Email:liuxl@mail.bnu.edu.cn
10.11975/j.issn.1002-6819.2019.12.021
TP79,S626
A
1002-6819(2019)-12-0173-11
吴锦玉,刘晓龙,柏延臣,史正涛,付 卓. 基于GF-2数据结合多纹理特征的塑料大棚识别[J]. 农业工程学报,2019,35(12):173-183. doi:10.11975/j.issn.1002-6819.2019.12.021 http://www.tcsae.org
Wu Jinyu, Liu Xiaolong, Bo Yanchen, Shi Zhengtao, Fu Zhuo. Plastic greenhouse recognition based on GF-2 data and multi-texture features[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(12): 173-183. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.12.021 http://www.tcsae.org
猜你喜欢
音乐天地(音乐创作版)(2022年6期)2022-10-14 11:26:50
今日农业(2022年16期)2022-09-22 05:38:44
今日农业(2022年16期)2022-09-22 05:37:44
中国农机化学报(2022年9期)2022-08-17 05:03:10
黑龙江粮食(2022年4期)2022-05-25 13:23:00
今日农业(2020年15期)2020-09-25 03:03:00
软件(2020年3期)2020-04-20 01:45:18
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
东坡赤壁诗词(2018年4期)2018-11-07 11:01:44
Coco薇(2017年8期)2017-08-03 15:23:38