
基于ROS的协作机器人控制系统①
2019-08-16 09:09张国胜马保平张召颖
计算机系统应用 2019年7期
邹 洵,张 帆,张国胜,马保平,张召颖
(上海工程技术大学 机械与汽车工程学院,上海 200072)
当前,随着对机器人应用的大力普及与精度要求的不断提高,其硬件设计和控制系统研发层出不穷.由于机器人型号日益增多,故而需要研发各种控制系统[1].
目前,虽然机器人研发公司众多,但是他们研发的控制系统都是对单一机器人本体做针对性的研发,普遍适用性和市场推广度较低,不利于机器人控制系统的发展.因此,需要开发出一套拥有普遍适用性,契合当下大多数主流机器人的控制系统才能顺应当前市场的刚需.
在实现与主流机器人相配套的控制系统设计中,可充分考虑利用一些开发平台,如:Microsoft visual,Matlab,MRDS 等.这些平台各有特点,Microsoft visual[2]适合在windows 系统环境下开发,较为全面,但过程繁琐,程序易报错;Matlab[3]多用于仿真实验,但难以实现实体机器人的控制工作;MRDS[4]重点在图形化编程,但应用范围较小.并且由于这些软件对于部分算法做了封装,如:OpenCV,Ompl 等.所以需要寻求一个能够兼容各种算法,实现多平台运用,上手容易的开发平台.
为此,本文基于开源机器人操作系统ROS(Robot Operating System),搭建了控制系统平台[5],进行了控制系统设计并作出了相应的仿真及实物控制实验.
1 ROS 配置环境的搭建
Robot Operating System (ROS)是一款机器人控制开发系统.它包含了三维重建、动态仿真、实时场景仿真、实物控制等多种功能,能够最大化地提供机器人开发的各种需求[6].
ROS 是建立在优班图 (以下简称Ubuntu)系统下的一款内置操作系统,但与系统的进程管理没有关系.它提供各种功能包,然后通过点对点机制建立功能包之间的通讯,搭建控制平台,实现机器人的仿真和实物控制,由此衍生出“节点”,“主题”,“服务”,“消息”等基本概念,如图1所示,通过它们之间的配合为控制系统提供数据.
1.1 节点
节点是ROS 里面的各种可执行文件,各节点之间通过主题,服务来通信.以此来提高系统的运行效率和可维护性.节点在系统中具有唯一性,各节点名称不可重复.这样,使得节点间的通讯亦具有唯一性.
1.2 主题
主题是各节点间传输数据的总线.通过主题发送的发布者和接收的订阅者之间不需要知道彼此之间的存在.同一个主题可以拥有多个订阅者,一个主题也可以拥有多个订阅者或者多个发布者,但需要不同的节点发布同样的主题,否则会出现错误.
1.3 服务
服务是用于直接与节点进行通信并且获取反馈.服务由一对消息组成,一个发送请求消息,另一个接收并应答.服务是用户自行开发的,存储在srv 文件夹中,通过编译转换为源码.
1.4 消息
消息用于一个节点向事先定义好的主题发布消息,从而将数据发送到另一个节点.ROS 里面的所有数据皆可定义为消息.消息的发送格式具有固定的类型和结构:功能包名称/.msg 文件名称.
通过节点、主题、服务、消息就可以搭建构建所有 进程的控制框架.如图1所示.

图1 ROS 的控制框架
2 控制系统算法简述
由于协作机器人在控制过程中需要对各个关节进行精确控制,达到流畅运动的目的,故而在运动的过程中需要一定的控制算法.本研究的主体算法为机器人运动过程中的路径规划算法.由于设计方案为输入初始位置和末端位置,进而控制机器人运动.根据此特点,本控制系统采用基于快速扩展树算法[7](Rapidly exploring Random Tree,以下简称RRT 算法).RRT 算法是建立在随机树的基础上,通过从根节点随机生长分支节点的方式,进行运动空间中的采样点碰撞检测,不需要进行三维立体建模,解决了三维空间和多条件约束的路径规划问题.由于其效率高、准确度高、入门容易,因此适用于多自由度机器人在空间中的运动.RRT 算法是以初始位置为根节点,通过随机采样,生成子节点,进而生成一个扩大的随机扩展树,当随机扩展树接触到目标节点时,就可以在随机扩展树里找到一条从根节点到目标节点的路径,即机器人运动的路径规划.其基本算法如下所示:

Function RRTPlan:BOOL(env:environment,T:RRTTree,Sgoal:node)1.Var Starget,Snearest,Snew,node 2.While(search time/space remaining) do 3. Starget=ChooseTarget(Sgoal)4. Snearest=Nearest(T,Starget)5.IF (Distance (Snearest,Sgoal) < Distance Threshold) then 6.Return true 7. Snew=Extend (Snearest,Starget)8.IF (Snew ≠ NULL) then
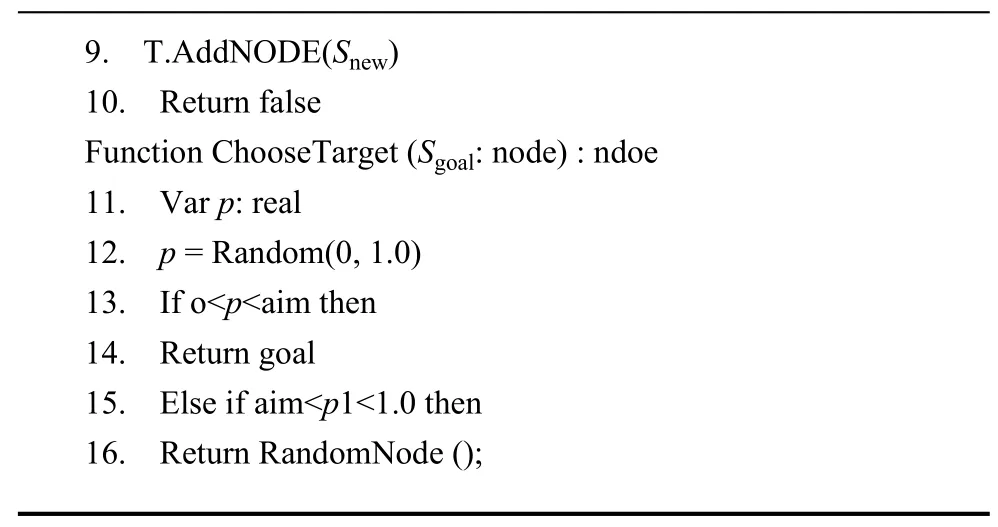
9.T.AddNODE(Snew)10.Return false Function ChooseTarget (Sgoal:node) :ndoe 11.Var p:real 12. p = Random(0,1.0)13.If o<p<aim then 14.Return goal 15.Else if aim<p1<1.0 then 16.Return RandomNode ();
在随机数的生长过程中(line 1~10),初试节点为根节点Sinit.首先,ChooseTarget 函数在工作空间中随机生成点Starget;其次,Nearest 函数在随机函数中选择一个距离Starget最近的中继节点Snearest;最后,通过Extend 函数从Snearest向Starget扩展一段距离α(α为RRT 算法的最小步长),最终得到新节点Snew.如果Snew与障碍物发生碰撞,则Extend 函数返回0,视为生长失败;否则将Snew加入到随机数中.重复以上步骤,直到随机数生长到目标点或者距离目标点的距离小于一个阀值,算法完成.
为加快路径规划的速度,现将随机树改进为:先计算出初试位置和末端位置在空间中的中点,机器人先运动至中点,在运动至末端位置,这样可以通过随机概率来决定下一个运动点是否是正确的目标点还是随机点.事先设定参数aim,然后生成0~1 的随机数bp,当0<bp<aim 时,随机数朝目标点运动;当aim<bp<1 时,随机数的生长方向随机[8].
通过RRT 算法,输入机器人的初试位置和目标位置,可计算出机器人在运动中各个关节的转动速度、弧度等参数,并输出.
3 通信接口设计
通信接口模块是搭建上位机电脑与下位机协作机器人的连接.用于实现两者间控制信息的发布和反馈信息的传送.由于传统的ROS 通讯使用ID 连接的通讯方式,适用范围狭隘,仅对于优傲等少数先进的机器人适用,然而基于控制器局域网[9](Controller Area Network,以下简称CAN 通讯)的通讯方式在当下具有普遍适用性,所以本研究仅调用了ROS 的路径规划算法与仿真环境,将其与CAN 通讯相结合,建立了一种新型的通讯方式.
将上位机计算出的协作机器人各电机参数,如:电机ID、转动角度、速度等,调用CAN 通讯,将各参数发送给协作机器人的各个电机上的控制芯片,进而控制协作机器人.本通讯方法跳过了ROS 通讯,直接建立了与电机之间的通讯,该方法在原有的稳定性好,即时性好等特点基础上,增加了通讯简单、适用性广、移植性高的特点,可适用于市面上大多数协作机器人.
4 协作机器人总体控制流程
本控制过程分为三个部分:路径规划运算,通讯连接,电机控制.对于协作机器人的控制,实质上是对于各个关节处电机转动角度、速度、开关时间的控制.故而本控制系统控制步骤如下:
(1) 搭建机器人的三维图,调用ROS 的环境配置,设定末端执行器的初始位置.
(2) 在ROS 的3D 可视化工具 (Rviz)界面打开配置好的仿真机器人,在编辑界面里拖动链条或输入末端执行器坐标,即可调用RRT 算法计算出每个关节运动到目标位置所需要的转动角度、速度、加速度、位置等参数,并且依次将每部分的计算结果发送出去.
(3) 调用CAN 通讯的方式建立上下位机的通讯,将计算出的每个关节的转动角度及其他必要参数通过通信接口发送给下位机.
(4) 下位机芯片接收数据,转换为电机可识别的参数发送给电机,进而控制机器人运动.
控制流程图如图2所示.
5 实验结果与分析
为了验证协作机器人控制系统的实际控制效果,用UR5 协作机器人进行了实验验证.搭建了如下的实验平台.
5.1 仿真实验
在仿真实验中,搭建控制界面,在界面里可设置末端执行器的坐标,通过改变坐标的数值,进而控制rviz 中的仿真机器人.通过仿真界面观察到水平机器人为初始化位置,通过在界面拖动或输入末端执行器的坐标轴,即可改变目标位置,首先,使得末端执行器坐标归位,回到原点.其次,在界面改变末端执行器坐标,使得机器人运动到目标位置,观察到能够改变机器人各个方向的目标位置并作出相应的路径规划.如图3所示.
通过仿真实验结果可知,人为输入末端执行器的目标坐标,在仿真程序中调用RRT 算法,可计算出各个关节转动角度,并在仿真界面里体现出来,从而实现对于仿真协作机器人的控制.实验输入的具体坐标,如表1所示.
5.2 协作机器人控制实验
实物机器人采用UR 协作机器人[10].上位机界面拖动链条,发送信息,通过通讯发送给机器人内置芯片,芯片通过分析接收的数据,转换为电机可识别的参数,进而控制电机的转速、转动时间等.机器人实验过程如图4所示.上位机发送指令后,下位机接收并作出相应的动作,完成路径规划,机器人实体做出相应的动作.

图3 仿真机器人控制实验

表1 输入的末端执行器的坐标
由于机器人硬件精度误差和ROS 算法的偏差,因此在控制系统内对发送的运动参数进行校准.驱动协作机器人匀速运动,通过读取各关节绝对位置,发现机器人并不能运动到指定位置,误差范围在2 mm 以内.经修改控制参数并且完善程序等调试,可通过上位机界面精确控制机器人的空间运动,使得机器人有较高的鲁棒性和实时性.

图4 实物机器人控制实验
通过调用ROS 自带的打印功能,可在输出界面输出各个关节的速度、时间、加速度等参数.表2记录了机器人在输入表1的末端执行器坐标后运动到指定位置所需时间.通过输出的时间表明运动较为平缓,有较好的鲁棒性和实时性.
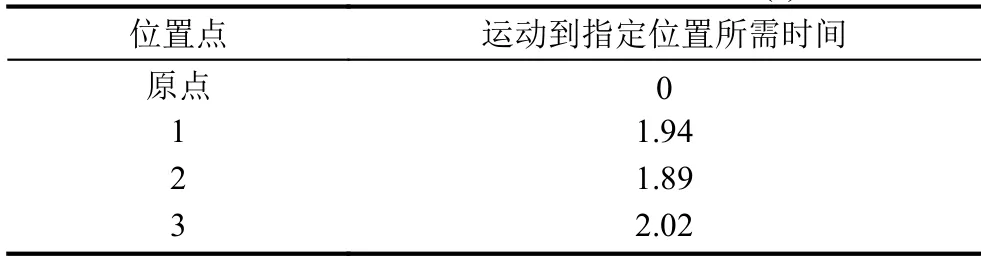
表2 运动到指定位置点所需时间(s)
6 结束语
本文基于Ubuntu 系统下结合ROS 实现了对于协作机器人的控制.并且优化了路径规划算法,改进了ROS 中上下位机的通讯方式,建立了在保证原有实时性和鲁棒性前提下适用性广、操作简单的通讯方式,并搭建了仿真实验和实物控制实验.由实验可知,控制系统能够实现协作机器人基本的工作.有一定的应用价值.但其他功能的开发,如:视觉系统开发、末端抓手开发,有待进一步的研究,以达到更佳的使用效果和应用前景.
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
茶叶通讯(2022年2期)2022-11-15
茶叶通讯(2022年2期)2022-11-15
汽车实用技术(2022年15期)2022-08-19
金桥(2020年9期)2020-10-27
金桥(2020年9期)2020-10-27
汽车维修技师(2019年2期)2019-08-23
人大建设(2019年4期)2019-07-13
读者(2017年14期)2017-06-27
