刑法介入自动驾驶技术的路径及其展开
2019-08-14 10:10杨宁
中国应用法学 2019年4期
杨 宁
一、问题的出现
自动驾驶技术是当今人工智能技术运用的热点之一。社会对于自动驾驶的研究和应用寄予了厚望,但自动驾驶技术造成的交通事故给人们敲响了警钟。2016年1月20日,河北邯郸发生了一起严重的交通事故,司机驾驶特斯拉Model S汽车在自动驾驶辅助模式下发生交通事故,造成司机死亡。〔1〕据报道邯郸特斯拉事故应为全世界第一起特斯拉自动驾驶模式造成的人身伤亡事故。韩佩:《河北男子开特斯拉自动驾驶撞垃圾车身亡,家人索赔1万,马斯克认错》,凤凰财经网,http://finance.ifeng.com/a/20180228/16002938_0.shtml,2019年6月1日访问。这是全世界第一次因汽车自动驾驶模式而造成驾驶人死亡的交通事故。2018年3月优步(UBER)公司的自动驾驶汽车在美国亚利桑那州发生了交通事故,导致1名路人死亡。这是全世界第一起自动驾驶造成路人死亡的交通事故。〔2〕亚利桑那州在对此事件的最新调查中否认了优步公司的刑事责任,对于驾驶人的刑事责任正在调查之中。王毓婵:《全球首例自动驾驶汽车致行人死亡事件判决,Uber 没有刑责》,好奇心日报,http://www.qdaily.com/articles/61805.html,2019年3月15日访问。
从现有法律的层面看,自动驾驶技术与现有法律制度主要存在两方面的不相容之处:第一,自动驾驶技术的合法性问题;第二,自动驾驶的驾驶员与自动驾驶技术之间的具体利用规则问题。为此,联合国及各国均在积极地进行道路交通法律的修订。2016年3月,《维也纳道路交通公约》针对其第8条规定的“凡行驶的车辆或车辆组合必须有一名驾驶人”进行了修订,改为允许“可以被驾驶员权限覆盖或接管”的自动驾驶技术,以驾驶员在场为必要条件。2017年5月12日,德国通过了《道路交通法》的修订草案,增加了对于智能汽车的定义及驾驶员的权利和义务等规定。〔3〕张韬略、蒋瑶瑶:《德国智能汽车立法及〈道路交通法〉修订之评介》,载《德国研究》2017年第3期。2018年12月,日本警察厅发表了《道路交通改正试案》。2019年3月8日,日本内阁批准《道路车辆运输法》修正案,并向国会提交审议。其修法的目的是为了推进自动驾驶的实用化,内容主要是对准自动驾驶与现有法条的矛盾进行修改、规定自动驾驶的驾驶人的责任。〔4〕《「道路運送車両法の一部PH改正XIIItf法律案」PH閣議決定自動運転車等の安全性PH確保XIIItfftめの制度PH整備しまXIII》,日本国土交通省网站,https://www.mlit.go.jp/report/press/jidosha01_hh_000066.html,2019年6月1日访问。从总体趋势而言,各国都允许准自动驾驶技术在公共道路上的运用,并对驾驶人的责任、自动驾驶汽车的标准进行了具体规定。
为落实国家的智能交通战略,我国地方政府和相关部门相继出台了对自动驾驶的监管细则,允许自动驾驶技术的道路测试。2018年4月3日工业和信息化部、公安部、交通运输部《关于印发〈智能网联汽车道路测试管理规范(试行)〉的通知》(以下简称为《智能汽车测试规范(试行)》),就自动驾驶汽车与我国的《道路交通安全法》《公路法》等法律法规的协调问题做出规范。〔5〕第28条:规范所称智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与(人、车、路、云端等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现安全、高效、舒适、节能行驶,并最终可实现替代人来操作的新一代汽车。智能网联汽车通常也被称为智能汽车、自动驾驶汽车等。智能网联汽车自动驾驶包括有条件自动驾驶、高度自动驾驶和完全自动驾驶。有条件自动驾驶是指系统完成所有驾驶操作,根据系统请求,驾驶人需要提供适当的干预;高度自动驾驶是指系统完成所有驾驶操作,特定环境下系统会向驾驶人提出响应请求,驾驶人可以对系统请求不进行响应;完全自动驾驶是指系统可以完成驾驶人能够完成的所有道路环境下的操作,不需要驾驶人介入。2017年12月18日北京市交通委联合北京市公安交管局、北京市经济信息委等部门印发《北京市加快推进自动驾驶车辆道路测试有关工作的指导意见(试行)》和《北京市自动驾驶车辆道路测试管理实施细则(试行)》两个文件,这是我国首次对于自动驾驶汽车进行道路测试的管理规范。随后上海市、重庆市等也出台了相关文件。但是,《道路交通法》等法律尚未进行修改,自动驾驶汽车(智能网联汽车)在法律层面的合法性仍处于模糊状态。《道路交通法》第19条明确规定:“驾驶机动车,应当依法取得机动车驾驶证。”自动驾驶显然不符合该条规定中预设的驾驶人要求。并且《公路法》和《道路交通安全法实施条例》明确禁止将公路作为检验机动车制动性能的试车场地,禁止在高速公路上试车。这也意味着目前大规模的自动驾驶道路试验的合法性依然存疑。
《智能汽车测试规范(试行)》第25条明确规定:“在测试期间发生交通事故,应当按照道路交通安全法律法规认定当事人的责任,并依照有关法律法规及司法解释确定损害赔偿责任。构成犯罪的,依法追究刑事责任。”智能网联汽车的重大交通事故责任正式进入了我国刑法的视野。
在我国的自动驾驶技术展开道路测试,而法律尚待完善的背景下,刑法对于自动驾驶技术带来的重大法益损害如何应对,已经不是科幻小说中的虚拟问答,而是亟待解决的实际问题。本文将就刑法是否应当介入自动驾驶、刑法的研究途径、准自动驾驶的研究意义、在当前立法之下通过解释学对于我国自动驾驶道路测试可能产生的案件进行分析等进行论述,以期从刑法角度对自动驾驶技术的法律规制进行有益的探索。
二、刑法是否要介入自动驾驶
从刑法的角度应如何对待自动驾驶技术,存在不同的声音。有学者认为刑法不应当介入自动驾驶问题。试图运用容许的风险理论进行说理。自动驾驶技术在降低交通事故及死伤人数上确实做出了巨大贡献,但是即使遵守自动驾驶技术仍然存在一定的风险,那么对此种风险应该排除驾驶人的归责。〔6〕[德]尼娜·芭巴拉·内斯特:《自动驾驶的刑法应对》,高艳东、盛佳译,载《人民检察》2018年第13期。
容许的风险理论是一种刑事政策上的观点,将某种新技术给社会带来的大幅收益与无可避免的损失之间进行比较,从而得出损害不可避免时不予归责的结论。将容许的风险理论作为政策的考虑,尤其是站在推动自动驾驶技术的立场上看是有道理的。但是,上述将其作为免责理由的观点,本文难以赞同:首先,上述观点仅从刑事政策角度出发,其所论及的风险与刑法解释学中研究的危险是两个维度的概念。容许的风险理论在解释论上并不足以成为一个不归责的理由。〔7〕张明楷:《刑法学》,法律出版社2016年版,第292—294页。其次,即使在解释论中,其适用的范围也相当狭窄,仅仅限定于为了保护一个更大的利益而违反一般规则,或者日常生活中应当遵守的注意事项,具有引起危害结果危险的行为。例如,消防车为了救火而违反交通规则的行为。〔8〕黎宏:《刑法总论问题思考(第二版)》,人民大学出版社2016年版,第264页。显然目前自动驾驶技术既没有形成一般规则,也不属于日常生活的行为,不符合适用的基本条件。最后,虽然容许的风险理论在刑事政策上有一定合理性,但在具体判断某行为是否是危险行为时,应当具体考虑该行为本身的实际价值而不是其他附加价值。〔9〕前引〔8〕,黎宏书,第 265 页。总之,无论是对于驾驶人还是自动驾驶系统的制造人都不应借助容许的风险理论免责。刑法应当介入自动驾驶技术问题。与其担心刑法会抑制自动驾驶技术的发展,还不如回归刑法保护法益的根本目的,重视自动驾驶技术对公共安全和个人生命、身体可能造成的危害,避免让法律成为技术风险的帮凶。
还有观点认为,在自动驾驶的技术尚不成熟,行业规范、行政管理法律不完善的当下,作为保障法的刑法应当在自动驾驶技术问题上靠后站。但是,刑法不仅仅可以通过业务过失的犯罪来防止自动驾驶在交通犯罪、产品安全等方面对公共安全和个人的生命、财产造成危害,也可以通过普通的过失犯罪甚至故意犯罪来维护公共安全和个人的法益免受危害。换言之,只要出现了运用自动驾驶而引发的重大事故,即使没有交通运输行政法规或者行业规范,基于法益保护的要求都必须发动刑法。本文认为前述已经发生的因自动驾驶系统导致的多起重大交通事故已经显示出刑法介入的必要性。特别是考虑到我国目前大规模开展自动驾驶技术的道路测试将对公共安全产生的影响,刑法应当未雨绸缪地针对自动驾驶技术的道路测试中可能发生的重大事故进行研究。
三、对刑法探讨自动驾驶技术途径的梳理
在肯定刑法应当介入自动驾驶技术问题的基础上,国内外的学理讨论主要围绕以下两个维度展开:
第一个维度是通过刑法解释学解决。总体来看,自动驾驶技术导致的人身损害事故主要涉及过失犯罪问题。其中一部分涉及驾驶人的过失行为是否构成犯罪的问题。国外学说从交通犯罪的角度,探讨如何结合新的交通运输管理法规等内容,研究过失的具体问题。有学者认为,对于准自动驾驶阶段驾驶人的过失行为,可以作为过失驾驶致死伤罪定罪量刑,主要讨论:驾驶人对于自动驾驶下的车辆事故的发生的预见可能性;在可以预见的场合下驾驶人对于该事故是否负有回避义务;驾驶人在信任自动驾驶系统时,是否允许运用信赖原则而否定驾驶人的过失。在准自动驾驶阶段,可能发生驾驶人的过失与自动驾驶系统过失的竞合问题,自动驾驶系统的过失由制造商承担。〔10〕[日]中川由賀:《自動運転に関XIIItfドfflイ(Ⅲ)ーおよshメーカーの刑事責任:自動運転の導入に伴って生じtf問題点と今後のfftfべffi方向性》,载《中京ロイヤー》2017年09期。有学者认为,在准自动驾驶阶段,如果自动系统要求驾驶人接管时,驾驶人因为处于醉酒状态而无法控制车辆导致事故发生,有可能构成危险驾驶致死伤罪。〔11〕[日]川本哲郎:《自動運転と刑事法》,载《同志社法学》第69卷2号。此外,在一些特殊情况下,自动驾驶汽车造成的重大人身事故是由自动驾驶汽车系统本身造成的,因此需要讨论谁应当对于自动驾驶系统的不完备承担责任。在自动驾驶模式下的车辆发生交通事故,驾驶人的危险行为或者状态因与事故发生没有因果关系从而无法成立危险驾驶致死伤罪;该种事故的责任只能归责于自动驾驶系统的制造商。日本刑法在制造商对于瑕疵产品产生的事故是否承担责任时,是通过判断其是否符合第211条业务上过失致人死亡罪来进行的。可以借鉴过去的司法案例,运用监督过失理论,将制造商的责任认定为具体负责人的责任,例如2012年日本的“三菱汽车车轮掉落案件”。〔12〕[日]岡部雅人:自動運転によtf事故と刑事責任——日本のけXIVtiうの視点fkら,载《愛媛法学雑誌》2017年1月。也有学者认为,无论汽车是否处于自助模式之下,车辆的驾驶人都要为违反交通法的驾驶负责。例如美国内华达州对于自动驾驶车辆的明确规定:“自动驾驶车辆的驾驶人被视为驾驶人,无论车辆是否处于自动驾驶状态下。”这是美国法采取的严格责任的态度。〔13〕See Jeffrey K.Gurney, Driving into the Unknown: Examining the Crossroads of Criminal Law and Autonomous Vehicles, 5 Wake Forest J.L.&Poly393(2015).
第二个维度是通过刑法立法解决:是否需要修正刑法以及如何修正的问题。许多学者主张对相关罪名的构成要件进行修正。例如,我国的危险驾驶罪中是否可以加入高度危险的违法操纵自动驾驶汽车的行为。在德国,有学者建议对德国刑法第315条C驾驶人的规范进行修改,增加对驾驶自动驾驶车辆的规范。例如,手动超速或停用自动驾驶功能;使用与自动驾驶系统提示相反的操作控制汽车,导致不能或不及时手动控制汽车。〔14〕前引〔6〕,[德 ]尼娜 ·芭巴拉 ·内斯特文。日本刑法没有规定法人的刑事责任,有学者认为因自动驾驶系统的过失而发生的事故,刑事责任应当由法人承担,从而主张在刑法中增设法人犯罪。〔15〕[日]樋口亮介:《法人処罰と刑事法理論》,東京大学出版社2009年版,第177页以下。
仍在热烈讨论中的一个重要的理论和立法问题是:是否承认高度人工智能的刑事主体资格及相应立法的问题。有学者认为,当自动驾驶系统具备了相当程度的学习能力之时,可能出现一种新的刑事责任的主体——人工智能主体,对于这种能够独立承担责任的智能人,其犯罪行为由其自身承担刑事责任。〔16〕[日]エリック·ヒFIゲンドFIフ:ロポットtt有責に行為XIIItfXVとがでffitffk?——規範的基本語彙の機械への転用可能性にxiiiXIVてー,伊藤嘉亮訳,载《千葉大学法学論集》2016年第2号。有学者直接提出了“机器人刑法”的概念。〔17〕[日]Susanne Beck:ロ(Ⅵ)ット工学と法:Thの問題,現在の議論,第一の解決の糸口,只木誠、富川雅満訳,载《 比較法雑誌第50巻(第2号)》。还有学者认为当人工智能产品属于“弱人工智能”时,它只是一种工具,研发者或者使用者利用该工具实施犯罪行为时,刑事责任应当由研发者或使用者来承担,可能存在成立过失犯罪的问题。〔18〕刘宪权:《人工智能时代的刑事风险与刑法应对》,载《法商研究》2018年第1期。但当人工智能产品达到“强人工智能”的程度之后,不可以再将人工智能产品作为“犯罪工具”。对于在设计和编制的程序范围外实施行为的智能机器人,在刑法上看可以认为已经具备了辨认能力和控制能力。那么实质上具备了刑事责任能力,可以独立承担刑事责任。我国刑法对此没有相关规定,应当重新设定新的刑事责任主体,并且相应地设置针对人工智能主体的刑罚,例如删除数据、修改程序、永久销毁等种类。〔19〕刘宪权、朱彦:《人工智能时代对传统刑法理论的挑战》,载《上海政法学院学报》2018年第2期。但是也有学者旗帜鲜明地提出了反对意见:认为所谓的刑事责任必须和人类的自由决定权紧密联系,而机器人的自由是截然不同的。〔20〕Vgl. Jan C. Joerden, Stafrecheliche Perspektiven der Robotik, in:Eric Hilegendorf/Jan-Philipp Günther(Hrsg.), Robotik und Gesetygebung(Robotik und Reche Bd.2),2013,s195ぉ.转引自褚陈城:《人工智能时代刑法归责的走向——以过失的规则间隙为中心的讨论》,载《东方法学》2018年第3期。
此外,自动驾驶可能涉及伦理难题。例如面对紧急避险情形时,自动驾驶系统应该如何设定操作程序。有学者认为看似合理的社会危害最小化的原则无法解决这一伦理难题,不能支持对人的法益的侵害,主张通过个人自治与社会团结理论进行处理。〔21〕See Ivó Coca-Vila, Self-driving Cars in Dilemmatic Situations: An Approach Based on the Theory of Justif i cation in Criminal Law, Criminal Law and Philosophy(2018)12:59-82.但是,2016年德国联邦交通和基础设施部成立的道德委员会认为对于上述难题运用社会危害性最小化原则是不合理的。
本文认为,上述刑法解释学和刑法立法学的两个维度,恰好与自动驾驶系统不同的发展阶段相吻合。只有当自动驾驶系统进入高级阶段,能够基于环境做出独立的判断时(超出了其制造者的预见可能性时),才存在讨论自动驾驶系统(人工智能系统)的独立责任问题。目前普遍采用国际汽车工程学会(SAE)的六级分类标准,对自动驾驶技术的阶段进行如下划分(如图1)。〔22〕国际汽车工程学会网,https://www.sae.org/news/press-room/2018/12/sae-international-releasesupdated-visual-chart-for-its-%E2%80%9Clevels-of-driving-automation%E2%80%9D-standard-for-selfdriving-vehicles,2019年6月1日访问。
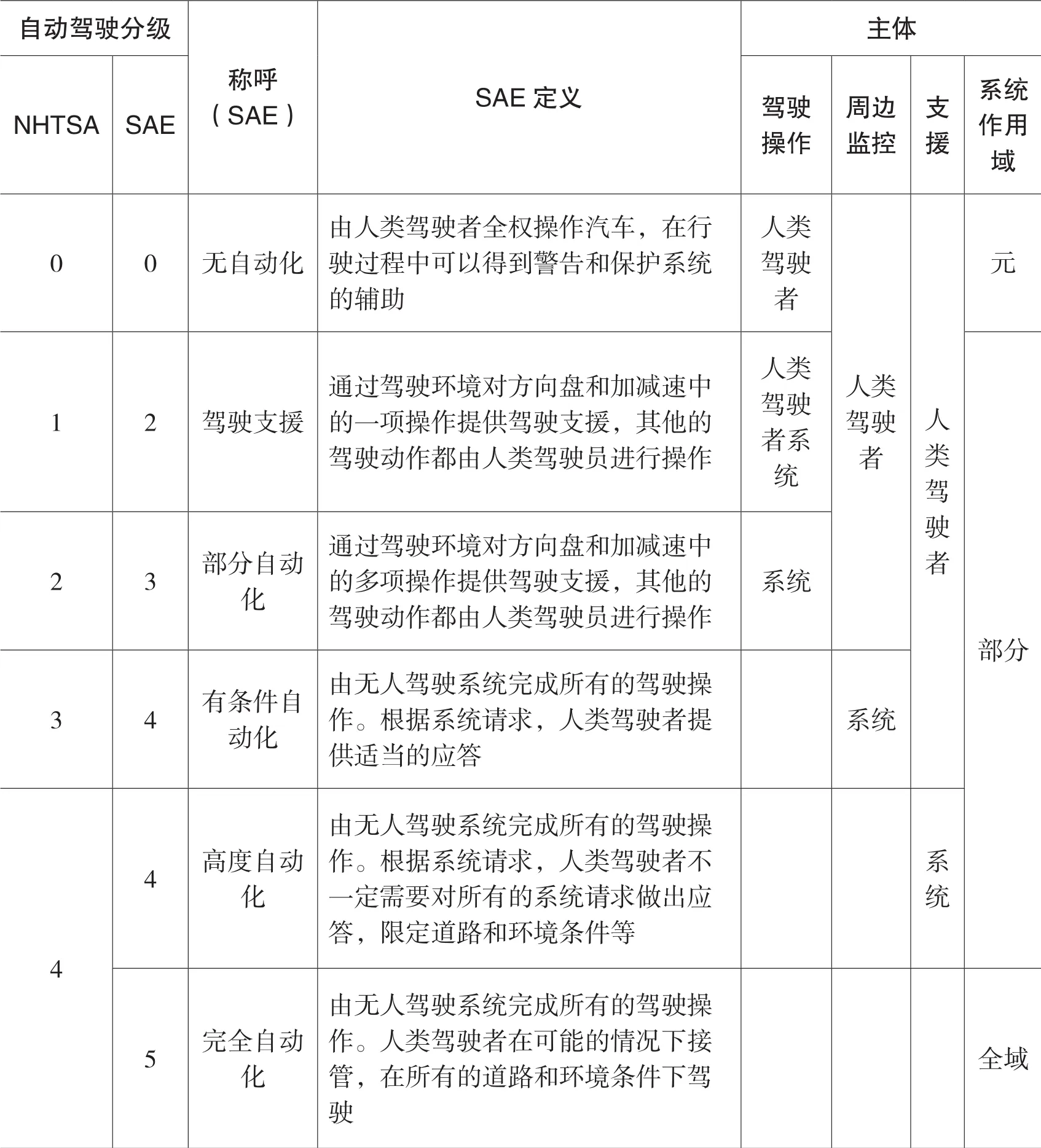
图1 自动驾驶的阶段划分
现在,国内外学者均认为L3是一个重要的阶段,在这一阶段汽车实际上主要由自动驾驶系统监控车辆的行驶,驾驶员根据系统的提示在必要时接管汽车。〔23〕江溯:《自动驾驶汽车对法律的挑战》,载《中国法律评论》2018年第2期。因此,L3阶段及之前可称之为准自动驾驶阶段,此时驾驶人仅仅在提示时接管汽车驾驶权。L4、L5阶段可称为完全自动驾驶阶段,此时自动驾驶系统将在任何情况下(即使驾驶员无法接管)掌握所有汽车驾驶权。
在L3准自动驾驶阶段,如果发生重大交通事故是由使用了自动驾驶技术的车辆造成的,其刑事责任在驾驶人与驾驶系统之间进行分担。在L4、L5完全自动驾驶阶段,驾驶人仅仅在极少的情况下掌握汽车的驾驶权,而自动驾驶系统始终处在监控汽车驾驶的地位上。在完全自动驾驶阶段,汽车在使用自动驾驶技术时发生重大交通事故并承担主要责任,刑事责任按照目前的刑法只可能归咎到自动驾驶技术的制造者。
因此,在准自动驾驶阶段带来的主要问题是刑法解释学的问题。在我国刑法的语境下,应当对涉及的交通肇事罪、过失致人重伤罪、过失致人死亡罪以及其他事故型犯罪进行研究;而完全自动驾驶阶段的问题的解决,则有赖于前一阶段处理案件积淀的经验,从刑法理论上进行论证后,最后进行必要的刑法立法。〔24〕杨宁:《自动驾驶与刑法研究的新展开》,载《人民法治》2018年第6期。
总之,刑法对于自动驾驶技术问题的研究刚刚起步,目前形成了从解释学角度对准自动驾驶阶段进行研究的路径,与从立法学角度对自动驾驶尤其是完全自动驾驶进行研究的路径。值得一提的是,各国的法律具体规定不同,无论是解释学还是立法学都应当紧紧结合本国的刑法进行展开。
本文以下主要对准自动驾驶阶段的我国交通刑法的解释学问题进行展开。首先从过失犯的基础理论方面论证,其次结合我国刑法交通犯罪的具体规定进行解释。
四、准自动驾驶阶段的过失犯理论难点
我国目前获得智能网联汽车开放道路测试牌照的公司,它们进行路测的自动驾驶技术均属于L3准自动驾驶阶段,即主要由驾驶人控制车辆、自动驾驶系统为辅助工具。对于在这一阶段发生的重大交通事故,导致对公共安全、个人生命、身体和财产造成的损失,其责任应当如何确定,在过失的基本理论运用上存在多个难点。
(一)对驾驶人过失归责绝对化的反思
发明自动驾驶技术的初衷是为了避免驾驶人的失误造成的交通事故,提高交通效率,为残疾人和老年人实现更多交通的可能性。〔25〕See Alex Forrest/Mustafa Konca, Autonomous Cars and Society, Worchester: Worchester Polytechnic Institute, 2007, p.10.因此,自动驾驶技术的发展与驾驶人责任的降低甚至免除成反比例关系。换言之,自动驾驶技术的运用终极目标是“消灭”驾驶人。
但是,现在各国行政法规倾向于将自动驾驶汽车造成事故的民事责任归责于驾驶人。德国2017年5月2日通过了《道路交通法》的修正案,其中新增关于自动驾驶汽车的条款。其第1a条第3款规定自动驾驶汽车驾驶人是指启动该法指的自动驾驶系统、利用其控制汽车运行的人,即使在启动自动驾驶系统时不亲自驾驶车辆,并且在车辆不具备自动驾驶系统使用时,驾驶人也有义务立即接管汽车的控制权。〔26〕前引〔3〕,张韬略、蒋瑶瑶文。即自动驾驶系统造成的事故在绝大多数情况下,由驾驶人承担民事责任。在讨论刑事上的过失时,如果根据行政规则规定的注意义务内容进行认定,则很有可能导致对驾驶人过失归责的绝对化。
无独有偶,我国《智能汽车测试规范(试行)》第18条规定:测试驾驶人应始终处于测试车辆的驾驶座位上、始终监控车辆运行状态及周围环境,随时准备接管车辆。当测试驾驶人发现车辆处于不适合自动驾驶的状态或系统提示需要人工操作时,应及时接管车辆。我国《刑法》第133条交通肇事罪的构成要件要求“违反交通运输管理法规”,意味着该刑事责任只能由驾驶人或者其他当事人承担。
设想案例1:在我国,一辆道路测试汽车在开放测试路段行驶,驾驶员在启用自动驾驶系统后没有时刻关注自动驾驶系统,因该系统无法识别前方一辆白色的卡车,而毫不减速地冲向该卡车,导致一名乘客死亡。〔27〕发生在美国的第一起特斯拉自动驾驶辅助系统导致发生车祸造成驾驶人死亡的案件中,该自动驾驶辅助系统没有成功识别前方在晴天下的晃眼的白色车辆。
按照上述部门规章将会得出这样的结论:驾驶人没有履行监督自动驾驶系统并及时接管汽车驾驶权的义务导致发生重大交通事故,因此驾驶人对交通事故承担过失责任。于是就会出现这样的悖论:行为人选择了昂贵的自动驾驶系统就是为了减轻其义务,但将自动驾驶系统运行没有正确识别而驾驶人也没有及时监督时发生的交通事故最后依然算在驾驶人头上,则明显加重了驾驶人的负担。试想,若是要求驾驶人承担如此沉重的注意义务,可以预见相当多的人会愿意回归人类驾驶车辆的模式。这显然存在某种权利和义务上的错位。
那么对于自动驾驶系统启用时造成的事故,可否考虑自动驾驶系统制造者的责任呢?现有否定与肯定两种学说。支持否定说的学者认为,在人工智能初期阶段没有明确的产业内标准,制造商的行为规则尚未确立,因此刑法是不宜介入的;如果刑法介入,可能导致研究和行业的发展受到扼制,最后导致尖端技术的萎缩。〔28〕褚陈城:《人工智能时代刑法归责的走向——以过失的规则间隙为中心的讨论》,载《东方法学》2018年第3期。也有学者认为,随着自动驾驶技术的运用,其对社会造成的危险可以转化为一种“允许的风险”,从而不能归责于自动驾驶系统的制造者。〔29〕前引〔23〕,江溯文。
支持肯定说的学者认为,自动驾驶系统创造出的危险,应当在驾驶人和制造商之间进行合理的分配。例如在倒车中,自动驾驶系统因为配备全景镜头等安全保障设备,能够看到死角并及时制动,其操作能力远胜过人类,通常根本不可能造成事故。因此,如果自动驾驶系统因为不具备相应的设备或者存在其他瑕疵,导致倒车中轧到行人的事故发生时,制造商应当承担责任。〔30〕彭文华:《自动驾驶车辆犯罪的注意义务》,载《政治与法律》2018年第5期。
本文认为否定说的缺陷十分明显。首先,在准自动驾驶的路测阶段,我国和其他国家都已经开始修订相关行政法规。例如,我国《智能汽车测试规范(试行)》第7条对测试车辆的条件进行了具体的规定。〔31〕《关于印发〈智能网联汽车道路测试管理规范(试行)〉的通知》第7条:(一)未办理过机动车注册登记。(二)满足对应车辆类型除耐久性以外的强制性检验项目要求;对因实现自动驾驶功能而无法满足强制性检验要求的个别项目,测试主体需证明其未降低车辆安全性能。(三)具备人工操作和自动驾驶两种模式,且能够以安全、快速、简单的方式实现模式转换并有相应的提示,保证在任何情况下都能将车辆即时转换为人工操作模式。(四)具备车辆状态记录、存储及在线监控功能,能实时回传下列第1、2、3项信息,并自动记录和存储下列各项信息在车辆事故或失效状况发生前至少90秒的数据,数据存储时间不少于3年:1.车辆控制模式; 2.车辆位置; 3.车辆速度、加速度等运动状态;4.环境感知与响应状态;5.车辆灯光、信号实时状态;6.车辆外部360度视频监控情况;7.反映测试驾驶人和人机交互状态的车内视频及语音监控情况; 8.车辆接收的远程控制指令(如有);9.车辆故障情况(如有)。(五)测试车辆应在封闭道路、场地等特定区域进行充分的实车测试,符合国家行业相关标准,省、市级政府发布的测试要求以及测试主体的测试评价规程,具备进行道路测试的条件。(六)测试车辆自动驾驶功能应由国家或省市认可的从事汽车相关业务的第三方检测机构进行检测验证,检测验证项目包括但不限于附件1所列的项目。对于制造商的测试车辆不具备上述条件,且确实与事故发生有因果关系,制造商的注意义务可以参照上述行政规定来进行分析。从发展的眼光来看,自动驾驶技术的行业与行政规范将越来越完善。
其次,刑法是法益保障法。对于自动驾驶技术的研发,即便暂时没有行业内的规范,也应当符合一般行为的注意规范。因此在新技术的研发和测试中因为不符合相应注意义务而造成人身伤亡事故的,至少可以通过过失致人重伤罪、过失致人死亡罪来认定其刑事责任。刑法的介入对于自动驾驶技术的抑制效果更是无从谈起。毕竟从利益选择的角度,人类希望得到的自动驾驶技术是为了增长其福利,而不是埋下“定时炸弹”。
最后,如上文所述,所谓的容许风险的概念,值得怀疑。该理论是德国在产业发展初期在产业发展和法益保护之间进行衡量,认为对社会整体利益有重大意义的行为,即使有法益侵害,也不作为犯罪来处理。但是,判断行为是否是危险行为时,应该考虑行为本身,而不是附加的交通秩序。〔32〕前引〔8〕,黎宏书,第 261—264 页。在自动驾驶技术的研发和测试中,按照现有的行政法规要求,通过充分和科学的测试是不应当引起重大事故的。在案例1中自动驾驶系统在晴天时无法识别白色车辆,这一系统的瑕疵完全可以通过增强测试而被发现并修复。如果案例1中的情况可以被视为容许的风险,则无异于用个人的法益损害填补本应当由制造商承担的研发成本。从法益衡量的角度来看,个人的法益受损是实在的、可见的,而社会整体利益的增多是模糊的、难以估量的,因此两者并不适合作为同类来进行大小的比较。
(二)对驾驶人过失责任的限制
本文认为自动驾驶创造的危险应当在驾驶人和制造商之间进行合理的分配。行政规章中对驾驶人采绝对责任的倾向,不能直接影响驾驶人刑事责任的判断。驾驶人是否要对自动驾驶系统的瑕疵造成的事故承担责任需要具体分析。可以认为驾驶人处在一种管理监督自动驾驶的地位。监督管理过失理论是日本独创的特色理论。一般认为,监督过失是指监督者对被监督者直接造成结果,因其不适当行为所构成的刑法上的过失。管理过失是指管理者在物的配备和人的体制等方面引起的结果中所构成的过失。〔33〕可见,管理监督者不仅对人有监督义务,而且对物有管理义务。在自动驾驶的语境中,准自动驾驶系统显然不能作为人,可以作为一种特殊的物。驾驶人和制造者都有对该物进行管理的义务。
在案例1中驾驶人没有监管自动驾驶系统、在紧急情况下没有接管车辆是造成事故的一个原因,但是自动驾驶系统不识别障碍物的瑕疵直接导致了事故的发生,二者同时造成了死亡事故。如果认为驾驶人始终具有监督自动驾驶系统的注意义务,则驾驶人对于自动驾驶系统的瑕疵的结果也应当承担责任。在这种情况下,有学者从侵权法的角度认为可以考虑驾驶员对于系统的“信赖”。如果认为驾驶员虽然被赋予了监督的义务,但是驾驶员的监督对汽车的运行没有产生实际意义,则可以认为驾驶员信赖自动驾驶系统,驾驶员对自动驾驶时发生的交通事故免责。但是,也有学者认为在部分自动驾驶阶段,驾驶员的监督责任通过各种方式被强调,自动驾驶系统还会对驾驶员的此种义务进行提示甚至警告,说明驾驶员无法从此种责任中逃脱,至少可以认为驾驶员与自动驾驶系统是“共同驾驶人”。〔34〕冯洁语:《人工智能技术与责任法的变迁——以自动驾驶技术为考察》,载《比较法学》2018年第2期。本文认为,从刑法解释的角度上看,很难认为自动驾驶系统属于《道路交通安全法》中规定的“当事人”;但是,可以考虑驾驶人对于自动驾驶系统的信赖关系对于驾驶人管理监督过失责任的影响。
信赖原则是发源自德国的理论,是指行为人在合理信赖其他交通参与者遵守交通规则的前提下,对于其他参与者的不适当行为引起的结果不承担责任。该原则适用逐渐从交通犯罪领域走向了其他领域,其一是管理监督过失领域。从旧过失论的立场来看,信赖原则是对于行为人预见可能性的限制。当行为人认为对方会采取适当行为时,信赖便蒙蔽了行为人,使其无法具体预见到实质的危险,因此也无法生成结果回避的心理和行为。〔35〕曹菲:《管理监督过失研究——多角度的审视与重构》,法律出版社2013年版,第286页。在自动驾驶的语境下,应当认为自动驾驶系统所具备的能力不仅包括简单的操作,例如识别障碍物、识别交通标识、转弯,而且可以完成复杂的操作,例如避免其他车辆的撞击、倒车、紧急制动等。在自动驾驶系统进行比较简单操作的情况下,驾驶人对于驾驶系统的信赖具有事实的根据。此时,驾驶人因为信赖驾驶系统有能力完成汽车操作,而没有履行时刻监督自动驾驶系统运行的责任,应当认为其没有具体地预见到事故的发生,因此不具有过失。在自动驾驶系统进行高难度操作且路况比较复杂的情况下,驾驶人不能完全信赖驾驶系统的操作,因此在具体的情形下,可以认为驾驶人对可能发生的损害有预见可能性。
案例2 :自动驾驶系统启用后,驾驶人没有观察路况和监督驾驶系统,在识别到行人后,自动驾驶系统发出报警,但在8秒之内驾驶人没有接管车辆,车辆保持原车速40km/h撞击行人,致使车上乘客一人死亡。〔36〕前述2018年优步公司在美国亚利桑那州发生的无人驾驶事故与案例2非常相似。参见金鹿:《Uber无人驾驶汽车刚刚撞死人,接下来会发生什么》,腾讯科技,https://tech.qq.com/a/20180320/014091.htm,2019年6月1日访问。
值得注意的是,在我国和德国等国家的行政法规中都赋予自动驾驶系统在处于不适合自动驾驶时发出提示驾驶人接管汽车的义务。在案例2中,自动驾驶系统已经开始报警,提示驾驶人接管车辆,在正常情况下驾驶人对此时汽车将会造成的损害已经有具体的预见(排除驾驶人处于醉酒等特别情况)。但是,过失应当考虑行为人是否能够回避事故的发生。〔37〕[日]平野龍一:《刑法総論I》,有斐閣1972年版,第194页。在案例2中可以具体地计算从自动驾驶系统发出警报的8秒内驾驶员有无回避事故的可能性。如果即便驾驶人在8秒时接管汽车也无法避免事故的发生,则驾驶人的行为创造的危险没有实现。从因果关系上看,行人的死亡仍然是由自动驾驶系统没有准确识别行人造成的。因此驾驶人不构成过失。
对于驾驶人应当在什么范围内“及时接管”也存在争议。德国《道路交通法》对驾驶员接管驾驶有关的时间概念采用了“充足的预留时间”(第1a条第2款)以及“立即”(第1b条)两个规定。但是这两个概念都只能通过具体的交通情景进行理解。特别是对于“立即”接管车辆的认定时,也需要考虑驾驶人心理反应时间。毕竟驾驶人在启用自动驾驶系统后,合理地相信自动驾驶系统可以控制车辆,当紧急情况发生时,驾驶人采取紧急措施所需要的时间可能长于人类驾驶在面对同样情况下采取同样措施的时间。
总之,对于驾驶系统造成的事故,限制驾驶人的过失责任可以考虑以下因素:驾驶人有无充分理由信赖驾驶系统、驾驶人有无缺乏结果回避的可能性或者驾驶人有无合理的心理反应时间。
五、准自动驾驶阶段的解释学展开
本文认为一般情况下自动驾驶造成的事故应当由驾驶人负责,这主要涉及我国交通犯罪的具体条文解释。对于驾驶系统制造者的责任,则主要涉及一般过失中的过失致人重伤罪、过失致人死亡罪和重大责任事故罪。以下主要从交通犯罪的解释学方面加以论述。
(一)自动驾驶汽车的驾驶人构成交通肇事罪的检讨
我国《刑法》第133条交通肇事罪规定:违反交通运输管理法规,因而发生重大事故,致人重伤、死亡或者使公司财产遭受重大损失的,处3年以下有期徒刑或者拘役;交通运输肇事后逃逸或者有其他特别恶劣情节的,处3年以上7年以下有期徒刑;因逃逸致人死亡的,处7年以上有期徒刑。交通肇事罪的成立以违反交通运输管理法规为前提。〔38〕黎宏:《刑法学各论》,法律出版社2016年版,第58页。因此,厘清现有的自动驾驶汽车相关行政管理法规,是讨论交通肇事罪的前提条件。
1.自动驾驶汽车发生交通事故的场所与交通肇事罪的认定
根据《智能汽车测试规范(试行)》第8条规定:省、市级政府相关主管部门在辖区内道路选择若干典型路段用于智能网联汽车道路测试并向社会公布。第9条第(五)款规定自动驾驶汽车主体申请路测条件是已在封闭道路、场地等特定区域进行实车测试。例如,北京的海淀区驾驶学校内设置了自动驾驶汽车的封闭测试区;在亦庄经济技术开发区、顺义区及海淀区内指定33条(共105公里)道路作为开放测试道路。〔39〕王忆斐:《自动驾驶启示录,国内智能网联示范区布局分析》,搜狐网,http://www.sohu.com/a/235916735_455835,2018年6月1日访问。自动驾驶汽车造成的重大交通事故发生在封闭测试区还是开放测试道路,对于行为人的刑事责任的认定有重大影响。
我国交通肇事罪的条文中没有明确违反交通运输管理法规发生的场所。从理论上看,交通肇事罪位于刑法第一章危害公共安全罪之中,其保护的法益是公共安全。从体系解释和法益保护来看自动驾驶汽车造成的重大交通事故理应发生在公共场所。
我国法院对于交通肇事罪的场所要件的认定经过了从形式标准到实质标准的变化。
形式标准阶段。1988年公布施行的《中华人民共和国道路交通管理条例》第2条规定:本条例所称的道路,是指公路、城市街道和胡同(里巷),以及公共广场、公共停车场等供车辆、行人通行的地方。据此,2000年我国最高人民法院《关于交通肇事刑事案件具体应用法律若干问题的解释》第8条规定:在实行公共交通管理的范围内发生重大交通事故的,依照《刑法》第133条和本解释的有关规定办理。在公共交通管理的范围之外,驾驶机动车辆或者使用其他交通工具致人伤亡或致使公共财产或者其他人财产遭受重大损失,构成犯罪的,分别依照《刑法》第134条、第135条、第233条等规定定罪处罚。换言之,交通肇事罪所指的交通事故是发生在公共道路管理范围之内,发生在此外的场合则可能构成重大责任事故罪、重大劳动安全事故罪以及过失致人死亡罪。但是,对于工厂、校园、居民小区内的道路是否属于“公共交通管理的范围内”则存在争议。当时有部分判例认为工厂、居民小区内的道路不属于“公共道路管理范围之内”。〔40〕曾琳:《李启铭交通肇事案》,载最高人民法院刑事审判一至五庭 :《刑事审判参考:办理危险驾驶类犯罪专集》,法律出版社2013年第5集(总第94集)。
实质标准阶段。2004年《道路交通法》第119条规定进行了修正:道路,是指公路、城市道路和虽在单位管辖范围但允许社会机动车通行的地方,包括广场、公共停车场等用于公众通行的场所。该修正内容扩张了交通肇事罪的场所要件,提出了实质标准:能否用于公众通行。河北省望都县人民法院将大学校园内的路认定为“道路”,从而肯定了交通肇事罪的成立。〔41〕2010年10月16日,被告人李某饮酒后在河北大学校园内高速行驶,将两名被害人甲、乙先后撞倒,又继续驾车离开。造成被害人甲死亡、被害人乙轻伤。望都县人民法院认为,被告人李某违反交通运输管理法规,在校园内醉酒驾车、超速行驶,发生重大交通事故,致一人死亡、一人轻伤,负事故全部责任,且在交通肇事后逃逸,其行为构成交通肇事罪,判处有期徒刑6年。参见前引〔40〕,曾琳文。开放型的居住小区内的行道也被认定为“道路”。〔42〕李振生:《廖开田危险驾驶案》,载最高人民法院刑事审判一至五庭 :《刑事审判参考:办理危险驾驶类犯罪专集》,法律出版社2013年第5集(总第94集)。
采用上述实质化标准,则自动驾驶汽车导致的重大交通事故的发生场所,不能根据是否名义上的“封闭场所”和“开放道路”来区分,而应当实质判断是否能够允许公众进入。例如,北京市的海淀区驾驶学校内的封闭场地,不允许其他非用于自动驾驶测试车辆进入,因此不属于允许公众进入的“道路”。那么,封闭场所内可能发生的多辆自动驾驶汽车相撞的重大事故、自动驾驶汽车与路人的重大事故,都不属于交通事故,因此不能适用交通法规认定责任并进一步构成交通肇事罪。〔43〕如果驾驶员对于该事故存在过失,可能构成(普通)过失致人重伤罪或者过失致人死亡罪。如果因为自动驾驶系统的不完备而造成了重大事故的发生,则可能追究自动驾驶系统制造者的责任。后一种类型本文限于篇幅原因,不进行讨论。又如,北京亦庄经济开发区指定的第一条开放道路,允许自动驾驶测试车辆与其他正常车辆同时在内运行,符合交通法上“道路”标准,因此有可能构成交通肇事罪。
2.交通肇事罪的主体
《智能汽车测试规范(试行)》第25条明确规定:“在测试期间发生交通事故,应当按照道路交通安全法律法规认定当事人的责任,并依照有关法律法规及司法解释确定损害赔偿责任。构成犯罪的,依法追究刑事责任。”此处的“当事人”按照我国《道路交通安全法》第2条的规定一般包括车辆驾驶人、行人、乘车人,也即直接参与交通活动的自然人。《智能汽车测试(试行)》第18条规定:测试驾驶人应始终处于测试车辆的驾驶座位上、始终监控车辆运行状态及周围环境,随时准备接管车辆。当测试驾驶人发现车辆处于不适合自动驾驶的状态或系统提示需要人工操作时,应及时接管车辆。因此,对于目前自动驾驶汽车造成的重大交通事故,如果认定事故由驾驶人承担主要责任或全部责任,则驾驶人可能成为交通肇事罪的主体。
但是,当重大事故被认定为是自动驾驶系统造成时,交通事故的责任不再由驾驶人承担。该事故造成的人身伤害或死亡的结果,如果自动驾驶系统的制造商中的直接负责人对此负有过失的,可能成立重大责任事故罪、过失致人死亡罪。
3.操作自动驾驶系统构成交通肇事罪的注意义务
驾驶人操作自动驾驶汽车除了遵守一般的交通法规外,还有特殊的注意义务,《智能汽车测试规范(试行)》对此进行了详细的规定。但是,违反上述规定的行为并不一定与事故发生具有刑法规范上的关联性。例如,第6条对于自动驾驶路测的驾驶人资格进行了规定,其中要求“具有相应驾驶车型驾驶证并具有3年以上驾驶经历”等条件。不具备该条件与事故的发生没有直接的关联。
结合《智能汽车测试规范(试行)》的条文,本文认为自动驾驶汽车测试阶段的驾驶人有以下三个方面特殊注意义务:第一,操作自动驾驶系统的注意义务。第6条第(七)款规定:经测试主体自动驾驶培训,熟悉自动驾驶测试规程,掌握自动驾驶测试操作方法,具备紧急状态下应急处置能力。驾驶人应当了解驾驶车辆的性能和自动驾驶系统,具备如何启用、停用和紧急制动等操作知识和实践能力。应当认为这种注意义务与普通驾驶中的驾驶资格具有同样的地位,相当于自动驾驶的资格。第二,管理监督驾驶系统运行的注意义务。第18条规定:测试驾驶人应始终处于测试车辆的驾驶座位上、始终监控车辆运行状态及周围环境,随时准备接管车辆。当测试驾驶人发现车辆处于不适合自动驾驶的状态或系统提示需要人工操作时,应及时接管车辆。该义务在上文已经有所讨论,不再赘述。第三,其他控制自动驾驶风险的注意义务。第19条规定,在测试过程中,测试车辆不得搭载与测试无关的人员或货物。第20条规定,在测试过程中,除测试通知书载明的测试路段外,不得使用自动驾驶模式行驶;测试车辆从停放点到测试路段的转场,应使用人工操作模式行驶。这说明,在自动驾驶的路测阶段,自动驾驶车辆的运用范围是被严格限制的,因为驾驶人和制造商都具有控制自动驾驶风险的注意义务,应在允许的范围内进行测试。
在具体的案件中,应当具体判断违反规范与注意义务的关系,避免从形式上认为“违反规则”或者“有违日常”的行为就是过失的实行行为。而应当从实质上考虑是否引起了“法不容许的危险”。〔44〕前引〔37〕,平野龍一书,第194页。
(二)自动驾驶汽车的驾驶人构成危险驾驶罪的检讨
我国《刑法》第113条之一危险驾驶罪规定了四种行为类型:追逐竞驶、醉酒驾驶、校车客运超载或超速、违规运输危化物品。〔45〕《刑法》第133条之一规定:在道路上驾驶机动车,有下列情形之一的,处拘役,并处罚金:(一)追逐竞驶,情节恶劣的;(二)醉酒驾驶机动车的;(三)从事校车业务或者旅客运输,严重超过额定乘员载客,或者严重超过规定时速行驶的;(四)违反危险化学品安全管理规定运输危险化学品,危及公共安全的。危险驾驶罪的“道路”范围与上述交通肇事罪的理解相同。
在我国目前自动驾驶道路测试的语境下,自动驾驶汽车暂时不能从事校车客运和运输危化物品的业务,而且自动驾驶系统也被要求遵循交通规则不可能超速。那么,最可能发生的情况是醉酒驾驶自动驾驶车辆。
案例3 :在一次道路测试中,驾驶人饮酒后进入车辆,马上启用了自动驾驶系统,但被交警部门发现其醉酒状态,经过血液测试驾驶人已经达到80毫克/100毫升醉酒标准。行为人的行为可否构成醉酒驾驶?
1.“驾驶”的范围
危险驾驶罪中要求行为人在道路上驾驶机动车。对于驾驶行为,常规的理解是操作车辆运行。推动车辆等行为不属于“驾驶”。对于使用自动驾驶系统是否属于“驾驶”则目前讨论较少。本文认为,使用自动驾驶系统属于驾驶。上述行政法规一直强调驾驶人在使用自动驾驶系统时须始终监控车辆运行状态及周围环境,随时准备接管车辆。因此,自动驾驶系统在操作车辆时,驾驶人对其管理监督的行为可以视为“借助工具”的驾驶行为。那么驾驶人在操作自动驾驶汽车时,实际上有两部分驾驶行为:亲手直接驾驶和通过驾驶系统的间接驾驶。
因此,行为人的醉酒驾驶行为可能涉及毫无争议的亲手驾驶阶段,也涉及存在争议的间接驾驶阶段。按照上述第20条的规定:测试车辆从停放点到测试路段的转场,应使用人工操作模式行驶。一般而言,只要认定驾驶人在人工操作阶段处于醉酒状态即可。案例3中,驾驶人没有采取人工操作,只开启了自动驾驶系统,可以认为驾驶人在间接驾驶时处于醉酒状态。
2.醉酒驾驶自动驾驶汽车的抽象危险
对于在案例3中醉酒后启用自动驾驶汽车是否具有对公共交通安全的抽象危险,存在不同看法:第一种看法可能认为自动驾驶是减少人类错误、提高交通安全而产生的科技,或许本身就是为了承担“代驾”工作而生。行为人醉酒后启用自动驾驶系统,是一种降低风险的行为。第二种看法认为,在目前的准自动驾驶技术中,自动驾驶作为辅助手段不能应对任何的交通状况,所以要求驾驶人管理监督自动驾驶系统的运行、适时地接管汽车的操作。如果驾驶人因为醉酒而处于难以响应自动驾驶系统警报和接管汽车操作的状态下,则对于公共交通的抽象危险性与醉酒驾驶普通车辆并无程度上的差别。本文支持第二种观点。
醉酒型危险驾驶的抽象危险,是一种类型化的危险,意味着不需要实际发生任何具体危险状态或者损害后果。只要求行为人的行为符合法条判断所言明的行为构成要件即可。因此,在准自动驾驶阶段,驾驶系统被视为辅助工具,那么驾驶人启用自动驾驶就被视为实行行为。从实质上看,既然自动驾驶系统会出现无法处理的情况,那么必然要求驾驶人处于可以随时接管的状态,这与一般的人工驾驶是一致的。因此,从形式和实质来看,案例3都可以构成醉酒型危险驾驶罪。
结 论
本文在梳理刑法对于自动驾驶问题研究路径的基础上,认为准自动驾驶阶段的解释学路径是需要研究的首要方向。本文从该路径进行展开,主要对如何限制驾驶人的过失范围、在准自动驾驶道路测试阶段可能发生的重大交通事故的问题进行了初步尝试。鉴于我国尚未出现涉及自动驾驶的刑事案件,本文仅能采用三个教学案例进行讨论。对于准自动驾驶阶段的产品制造人责任和完全自动驾驶阶段的立法研究路径,还有待未来进一步深入。
猜你喜欢
法律方法(2021年4期)2021-03-16
学生天地(2020年5期)2020-08-25
小太阳画报(2018年3期)2018-05-14
小天使·一年级语数英综合(2017年3期)2017-04-25
莫愁(2017年9期)2017-04-07
阅读与作文(小学低年级版)(2016年12期)2016-12-22
汽车博览(2016年9期)2016-10-18
中国市场(2016年45期)2016-05-17
烟台大学学报(哲学社会科学版)(2015年5期)2015-12-05
汽车文摘(2015年11期)2015-12-02