
丘陵山地拖拉机姿态主动调整系统设计与实验
2019-08-14 07:57:28齐文超李彦明陶建峰覃程锦刘成良
农业机械学报 2019年7期
齐文超 李彦明 陶建峰 覃程锦 刘成良 种 昆
(1.上海交通大学机械与动力工程学院, 上海 200240; 2.山东五征集团, 日照 276800)
0 引言
丘陵山地地形复杂,农机作业环境以斜坡为主。传统农业机械在丘陵山地作业效率低、乘坐舒适性差,甚至出现翻车、侧倾等严重安全事故。丘陵山地拖拉机是专为丘陵山区农业生产研发的农机装备,能够大大提高丘陵山区农业生产水平。调平系统作为丘陵山地拖拉机的核心子系统,其性能直接影响拖拉机作业时的安全性、作业效率和乘坐舒适性。国内丘陵山地拖拉机调平系统研究起步较晚,相比于国外技术上存在较大的差距,亟待研发高效、轻便、坡地适应性高的姿态主动调整系统,以提升我国丘陵山区农机装备技术水平[1-2]。
目前,国内外学者对高空升降平台[3-4]、果园升降平台[5-7]、农机具[8-13]的调平系统研究较多,关于山地拖拉机调平系统的研究尚不多见。杨福增等[14-16]提出了适用于微型履带式拖拉机的自动调平系统,利用单片机处理倾角传感器和限位开关信号,并通过控制液压缸缸体运动实现车身自动调平。国外学者对调平控制研究较早[17-19],LEONARD等[17]研发的自动调平系统响应速度快、控制精度高,适用于静止状态的车辆调平。徐峰等[20]将 PLC、触控屏等自动化及人机工程引入到丘陵山地拖拉机车身调平装置中,设计了面向履带式拖拉机的车身自动调平控制系统。彭贺等[21]提出的丘陵山地轮式拖拉机调平系统使用液压缸驱动,通过对丘陵山地拖拉机车身调平系统进行运动学与动力学仿真,得到了系统中各个零部件的受力及扭矩随时间的变化曲线,对拖拉机车身调平系统的设计具有一定的参考价值。分析上述文献可知,国内对于丘陵山地拖拉机调平系统的研究较少,现有调平系统难以应用于丘陵山地农机实际作业中。
为提高丘陵山地拖拉机的作业安全性、作业效率及乘坐舒适性,本文设计基于双闭环PID算法的丘陵山地拖拉机姿态主动调整系统,并建立其动力学模型,通过数值分析和实验验证系统的作业安全性和适应性。
1 系统设计
根据丘陵山地特定作业需求,所设计的丘陵山地拖拉机姿态主动调整系统由姿态调整机构、液压驱动系统和控制系统组成。丘陵山地拖拉机前驱动桥为随动系统,姿态调整主要通过附加于后驱动桥的左、右偏心轮摆动机构实现。姿态调整机构如图1所示,左、右偏心轮顺时针或逆时针方向转动可实现左右车轮的高低调整,从而实现拖拉机姿态调整。
在姿态调整过程中,要求左右摆动机构摆角相等、方向相反,使两后轮轴线基本重合,车辆可以正常行驶。摆动机构摆角与车身横向倾角的关系为
Ltanγ=2lsinδ
(1)
式中γ——车身横向倾角,rad
δ——单侧摆动机构摆角,rad
L——轮距,m
l——摆动机构摆动半径,m
如图2所示,左右摆动机构摆动在±40°范围内。
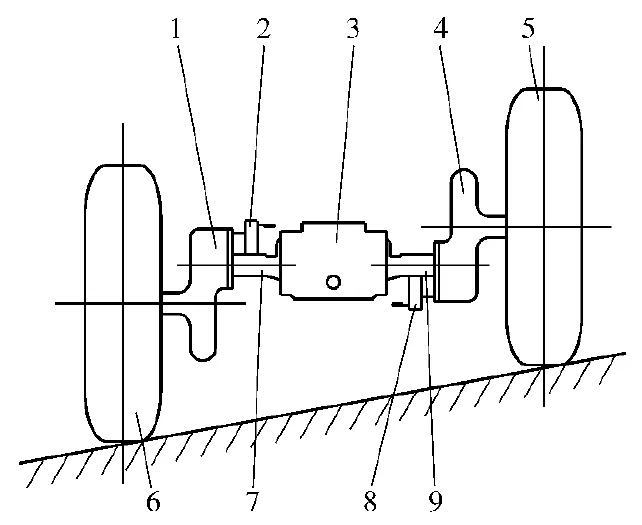
图1 姿态调整机构示意图Fig.1 Attitude adjustment mechanism diagram1.左末端传动机构 2.左摆动机构 3.后驱动桥 4.右末端传动机构 5.右车轮 6.左车轮 7.左半轴套管 8.右摆动机构 9.右半轴套管
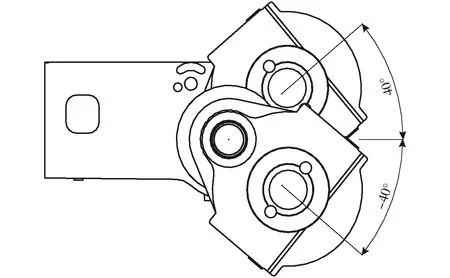
图2 摆动机构示意图Fig.2 Schematic diagram of swing mechanism

图3 液压系统和控制系统简图Fig.3 Diagram of hydraulic dive system and control system1.控制器 2.左摆动机构摆角 3.右摆动机构摆角 4.水平倾角 5.左液压马达 6.左比例电磁阀 7.右液压马达 8.右比例电磁阀 9.液压泵
图1中左右摆动机构分别由两个液压马达驱动,液压马达的转速和转向分别由两个电液比例阀控制。液压驱动系统和控制系统如图3所示。左右角度传感器分别安装于左右摆动机构上,用来测量其摆动角度。倾角传感器安装在车身上,用于测量车身倾角。控制器根据上述传感器实时检测的数据进行处理分析,输出相应大小的电流,进而控制两个比例电磁阀开口方向及大小,从而调整液压马达转向和转速,使左右摆动机构摆动,实现车身的姿态主动调整。
2 系统建模
2.1 电液比例阀负载流量方程
考虑到位置伺服系统动态分析往往是在零位工作条件下进行,油液泄漏和油液压缩性的影响极小,流入液压马达的流量Q1与流出流量Q2基本相等,为简化分析,定义负载流量为
(2)
式中Kq——流量增益系数
xv——阀芯开口位移,m
Kc——流量压力系数,m5/(N·s)
pL——负载压差,Pa
电液比例伺服阀的传递函数通常用振荡环节来近似,但当阀的固有频率较高时,亦可近似为比例环节

(3)
式中I——通入比例电磁铁电流,A
Ksv——比例系数
2.2 液压马达流量连续性方程
液压马达流量满足连续性方程
(4)
式中Dm——液压马达理论排量,m3/rad
θm——液压马达转角,rad
Ctm——液压马达泄漏系数,m5/(N·s)
Vt——阀腔、马达腔与连接管道总容积,m3
βe——油液有效体积弹性模量,Pa
2.3 液压马达与负载力平衡方程
当液压马达与负载力平衡时,满足方程
(5)
式中Jt——液压马达和负载折算到马达轴上的总惯量,kg·m2
Bm——液压马达和负载的粘性阻尼系数
G——负载的扭转弹簧刚度,N/m
TL——作用在马达轴上的负载力矩,N·m
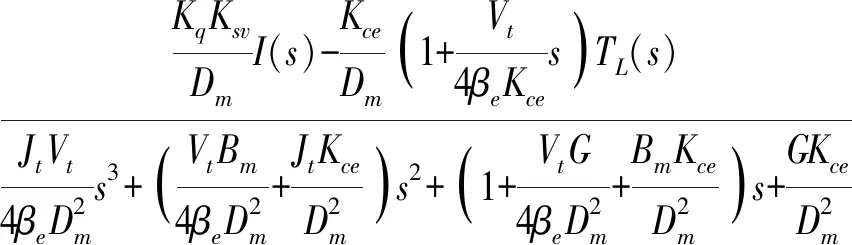
2.4 传递函数推导及阀控马达控制框图
对式(2)~(5)拉普拉斯变换为
(6)
其中
Kce=Kc+Ctm
(7)
式中Kce——总流量压力系数,m5/(N·s)

(8)
(9)
(10)
式中ωh——液压固有频率,rad/s
ζh——液压阻尼比
阀控马达控制框图如图4所示。输入量为通入电液比例阀电流以及负载力矩,输出为马达转角。
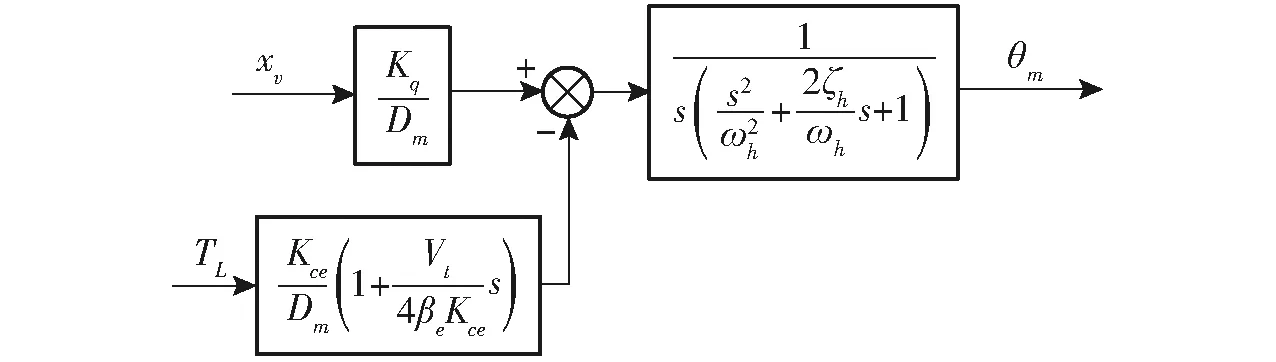
图4 阀控马达控制框图Fig.4 Valve control motor control block diagram
2.5 状态空间模型的建立
以液压马达转角(x1)、马达角速度(x2)和负载压差(x3)作为系统的状态变量,比例电磁阀输入电流(u1)和作用在马达上的负载力矩(u2)为系统输入,液压马达转角(y)为系统输出,令
(11)
(12)
其中
(13)
(14)
C=[1 0 0]T
(15)
式中A——系统矩阵B——输入矩阵
C——输出矩阵
2.6 姿态主动调整系统
如图5(图中θ0、θ分别为车身目标倾角和倾角传感器检测的实际倾角;α0、α、Iα分别为左摆动机构目标摆角、角度传感器检测的实际摆角和左比例阀输入电流;β0、β、Iβ分别为右摆动机构目标摆角、角度传感器检测的实际摆角和右比例阀输入电流;θ1为车身本身倾角)所示,提出了基于双闭环PID算法的姿态主动调整方法,在保持车身处于目标倾斜角的前提下可保证左右两摆动机构摆角相等、方向相反。控制系统由控制器、角度传感器以及倾角传感器组成。控制器实时接收倾角传感器和角度传感器所检测到的车身横向倾角和左右两摆动机构摆角,计算出左右两摆动机构应摆动角度。外环PID使两摆动机构摆动到目标角度,内环PID保证摆动过程中左右两摆动机构摆动角度相等、方向相反。
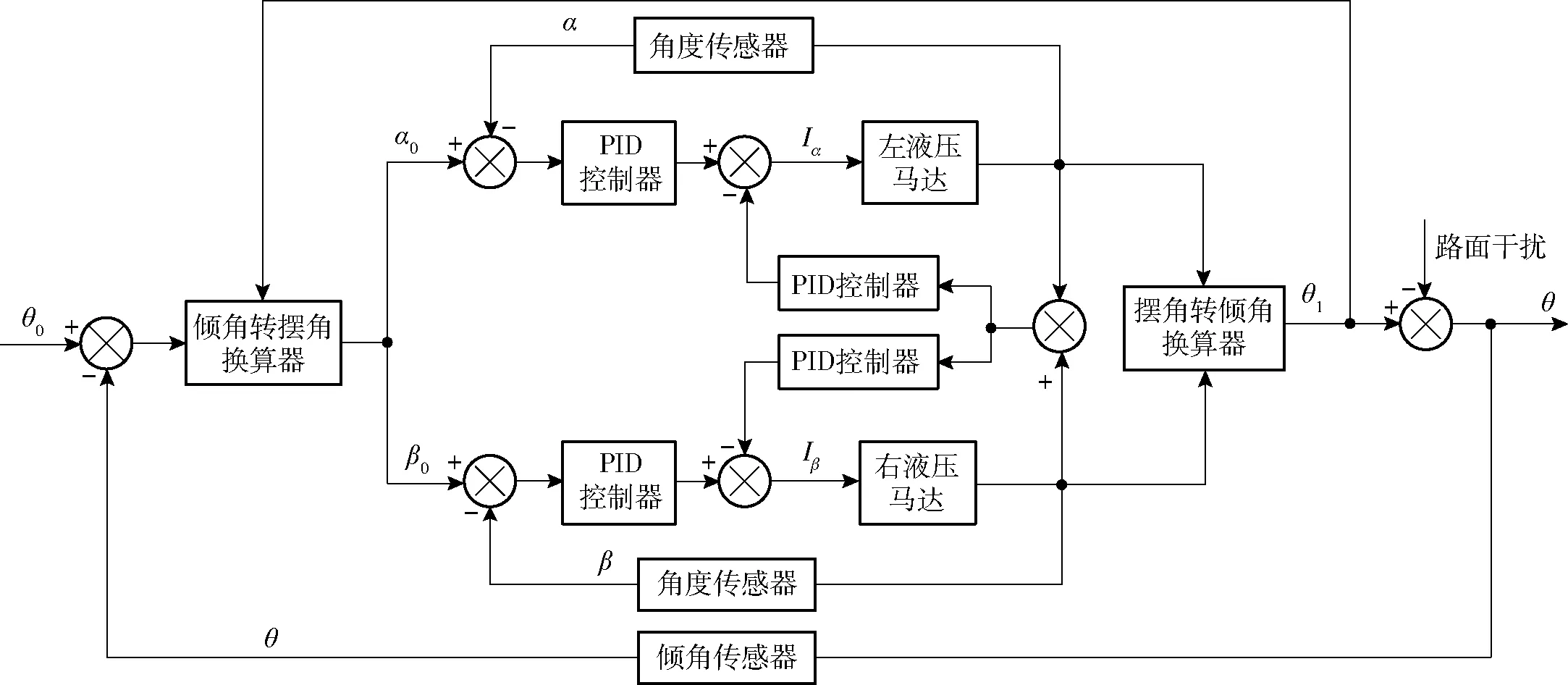
图5 姿态主动调整系统控制框图Fig.5 Attitude active adjustment system control block diagram
其中,倾角转摆角换算器和摆角转倾角换算器计算公式为
Ltan(θ0-θ+θ1)=lsinα0-lsinβ0
(16)
lsinα-lsinβ=Ltanθ1
(17)
其中
α0=-β0
3 数值分析
使用Matlab建立丘陵山地拖拉机姿态主动调整系统动力学模型。丘陵山地拖拉机实际行驶过程中,液压马达转动与摆动机构摆动传动比为79∶1,且作用在液压马达轴上的负载力矩不断变化,为简化数值分析过程,假设作用在液压马达轴上的负载力矩分别为70、80 N·m的恒定值。系统模型参数如表1所示。
1.5.2 证候分级量化标准[7‐8] ①主症为咳嗽(日间咳嗽+夜间咳嗽)、咳痰(黏稠+难咯),共4项,分为正常、轻、中、重4个等级,赋0、1、2、3分;②次症为发热,分为正常、轻、中、重4个等级,赋0、1、2、3分。口渴、面赤、心烦、小便短赤、大便干结分为无、有2个等级,赋0、1分。③体征为肺部啰音,分为正常、轻、中、重4个等级,赋0、1、2、3分。中医证候评分不包括肺部啰音。
丘陵山地拖拉机作业环境多为10°以内较平稳的斜坡。因此,初始给一个10°的干扰值,以模拟拖拉机在10°坡地上的调平过程。仿真结果如图6所示,图6a表示路面干扰值与车身横向倾角,图6b表示左右摆动机构摆角绝对值的差。根据仿真结果可知,由10°调平到0°所需时间为6.5 s,且左右两轮摆角绝对值的差在±0.25°范围内。
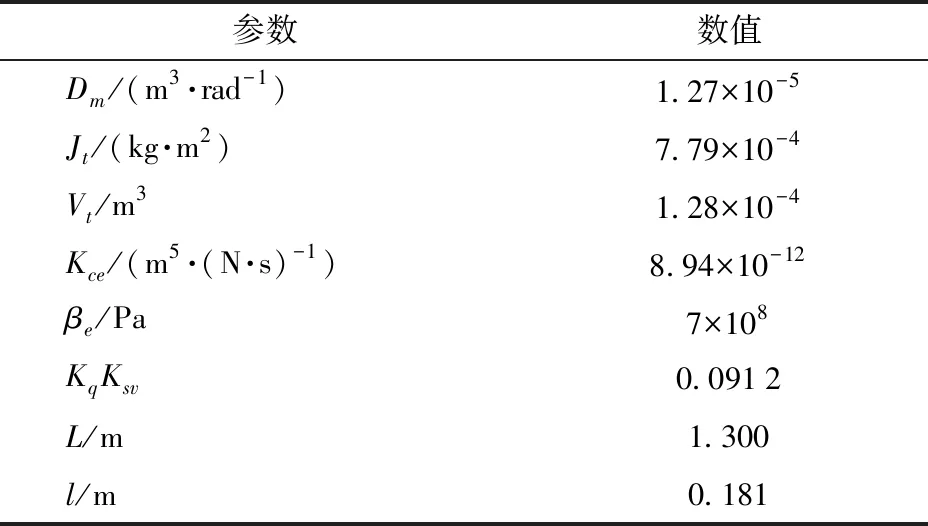
表1 系统模型参数Tab.1 Parameters of system model
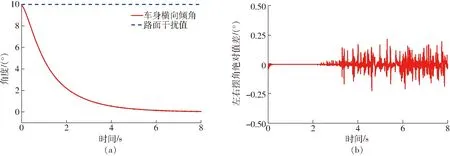
图6 10°坡地上调平过程的仿真结果Fig.6 Simulation results of leveling process on 10° slope
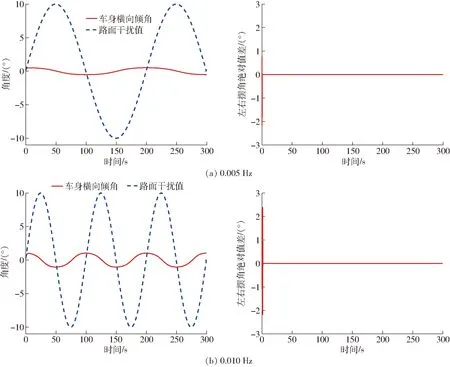
图7 崎岖路面上调平过程的仿真结果Fig.7 Simulation results of leveling process on rough terrain
进一步加大路面崎岖程度,分别以频率为0.005、0.01 Hz,幅值为10°的正弦波作为干扰输入,模拟拖拉机以较低速度在波动起伏较大的丘陵山地中驾驶工况,仿真结果如图7所示。
通过对比图7a、7b可看出,路面干扰频率越大,姿态主动调整后的车身横向倾角波动越大,并且可将车身横向倾角控制在±3°范围内。因为左右两轮负载力矩均设为恒定值,所以仿真结果中左右摆动机构摆角绝对值差波动较小。
4 实验与分析
4.1 实验平台
在山东五征集团生产的拖拉机上安装姿态主动调整系统。其中液压驱动系统由液压泵、液压马达、比例换向阀等组成。液压泵由河北正新齿轮泵厂生产,型号为CBN-E314;液压马达选用丹佛斯MS80型;电液比例阀由HYDRO CONTROL公司生产,型号为EX38,所需输入电流范围为0~1.3 A。
控制系统中控制器自主研发,CPU使用意法半导体公司的STM32F407ZGT6芯片;控制比例电磁阀模块采用英飞凌公司的TLE82453芯片,该芯片可编程输出PWM电流范围为0~1.5 A,分辨率为0.73 mA;控制器集成CAN总线通讯接口,用于接收动态倾角传感器数据。将北微BW-VG525型超精度CAN动态倾角传感器(动态精度0.3°)分别安装在左右摆动机构(用于测量左右摆动机构摆角)和后车身上(用于测量车身横向倾斜角)。实验拖拉机如图8所示。
4.2 实验内容及结果分析
实验分为3部分:实验1,拖拉机左右摆动机构初始摆角均为0°,分别静止在10°和-10°的斜坡上,随后启动自动调平控制程序。实验2,拖拉机左右摆动机构初始摆角均为0°,静止在水平侧倾实验台上,启动自动调平控制程序,随后实验台分别转动到10°和-10°。实验3,拖拉机启动自动调平控制程序,以1挡速度(1.98 km/h)行驶在高低起伏较大的坡地上。
实验1和实验2使用相同的实验平台,该实验平台为ZCF-40型机动车侧倾实验台,实验现场如图9所示。

图8 实验拖拉机实物图Fig.8 Experiment tractor physical map

图9 实验现场Fig.9 Experiment site
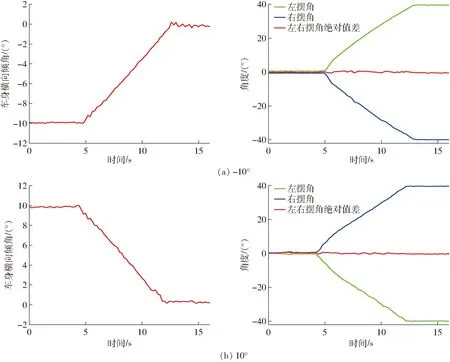
图10 实验1结果Fig.10 Result of experiment 1
实验1结果如图10所示。车身横向倾角由10°调平到0°需要7.5 s,调平误差在0.5°范围内,并且左右摆动机构摆角绝对值差为±1°。调平过程平稳,满足作业需求。
实验2结果如图11所示,实验台提升和下降速度无法设定,速度较为缓慢,在缓慢情况下调平效果与实验1基本相同。
实验3实验场景如图12所示。实验结果如图13所示,拖拉机启动自动调平控制程序后,在0~85 s以及350 s之后这两段平稳路面上行驶期间,车身横向倾角及左右摆角绝对值基本为0°,没有明显的稳态误差。当行驶在85~350 s期间的起伏较大(最大路面倾角为10°)的路面上时,车身横向倾角平均绝对误差为0.49°,均方根误差为0.69°,最大误差2.95°;左右摆动机构摆角绝对值的差平均绝对误差为0.63°,均方根误差为1.02°,最大误差为4.95°。
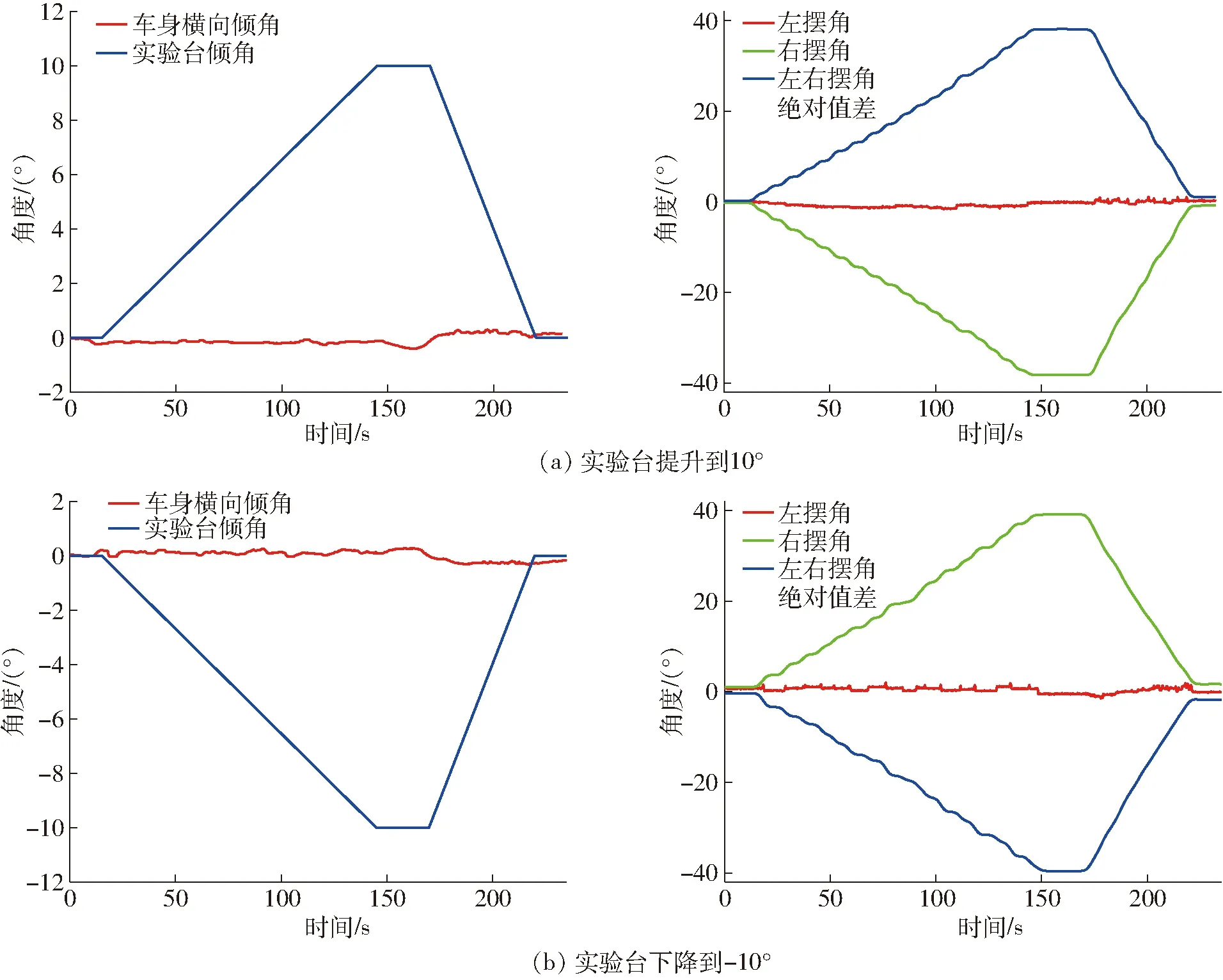
图11 实验2结果Fig.11 Results of experiment 2

图12 实验3现场Fig.12 Experiment 3 site
根据图13a可知,红色线为不启动自动调平系统时,所测得的实际路面倾角,最大倾角达到10°,说明路面高低起伏,作业环境较为恶劣。蓝色线为启动自动调平系统后,所测车身实际倾角,表明在起伏较大的恶劣工作环境下,车身倾斜角仍可控制在±3°范围内,可满足安全作业的需求。如图13b所示,左右摆动机构摆角绝对值差在±5°范围内,左右两轮轴线仍基本重合,能够满足车辆正常行驶需求。实验结果表明该调整系统能够适应起伏较大坡地等恶劣作业环境。
5 结论
(1)设计了基于双闭环PID算法的丘陵山地拖拉机姿态主动调整系统,该系统由姿态调整机构、液压驱动系统和控制系统组成。对姿态主动调整系统进行动力学建模,运用Matlab对系统进行数值分析,数值分析验证表明该自动调平控制算法能有效满足车身横向调平需求。
(2)对整机进行实验验证,结果表明,所设计的姿态主动调整系统在±10°的坡地上调平时间为7.5 s,最大调平误差小于0.5°,左右两后轮摆动机构的摆角绝对值之差在±1°以内。同时,该拖拉机在高低起伏较大的坡地上以1挡速度行驶时,车身倾斜角可控制在±3°范围内,左右车轮摆角绝对值差在±5°范围内。所设计的姿态主动调整系统不仅能在较平缓的丘陵坡地上安全作业,并能适应起伏较大的坡地等恶劣作业环境。
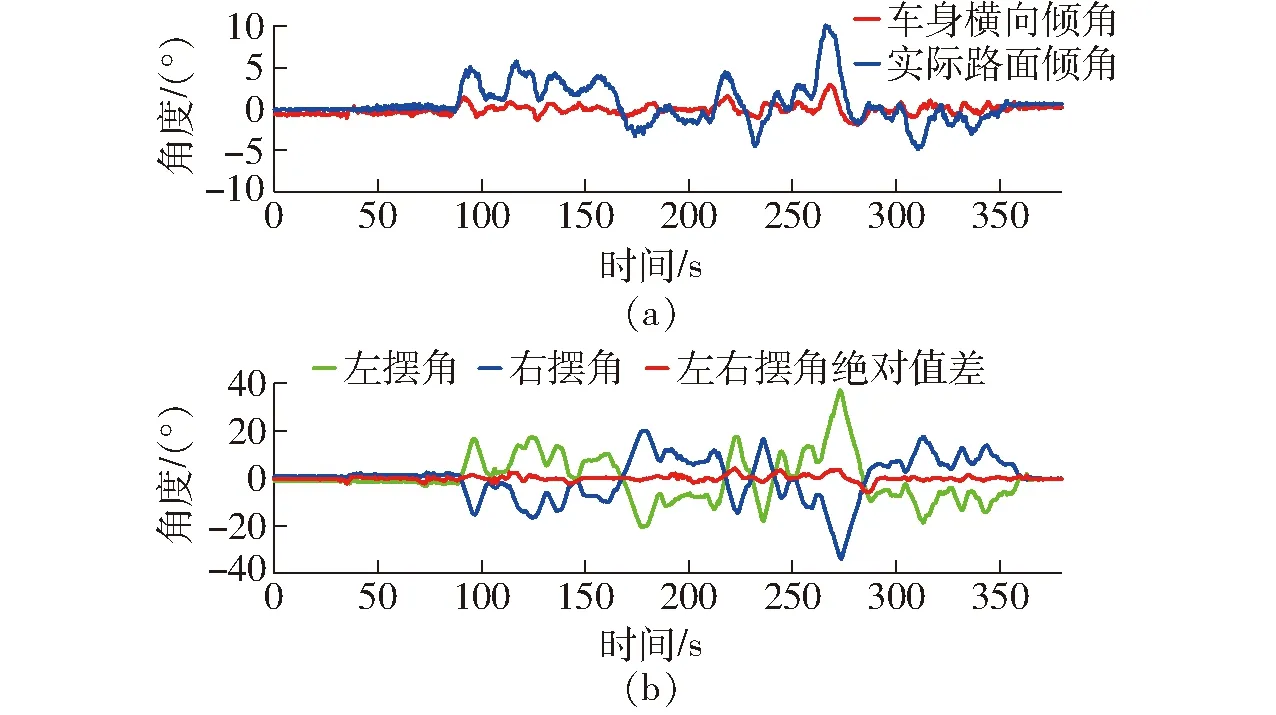
图13 实验3结果Fig.13 Result of experiment 3
猜你喜欢
中国民间疗法(2021年5期)2021-06-09 09:21:08
今日农业(2020年18期)2020-12-14 19:08:44
机械工程与自动化(2020年4期)2020-08-25 02:06:58
森林工程(2018年4期)2018-08-04 03:23:38
散文诗(2017年22期)2017-06-09 07:55:21
小学生导刊(2017年15期)2017-05-17 05:44:09
航天工业管理(2017年4期)2017-05-12 01:16:35
棋艺(2016年4期)2016-09-20 06:15:27
中国塑料(2016年3期)2016-06-15 20:30:00
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:11
