
收获机虚拟环境模型与仿真平台构建
2019-08-13 01:42:24曾泽钦邹湘军贾春洋
农业机械学报 2019年7期
陈 燕 曾泽钦 王 杰 邹湘军 贾春洋 张 坡
(1.华南农业大学工程学院, 广州 510642;2.华南农业大学南方农业机械与装备关键技术教育部重点实验室, 广州 510642)
0 引言
农业机械设计研究需要大量的野外试验[1],对粮食作物及农产品收获机的研究,需等待收获季节,严重影响设备的研发周期[2]。虚拟现实的虚拟设计与三维仿真及其人机交互技术具有安全可靠的特点,可缩短设计周期,提高设计品质[1,3]。虚拟现实技术在工业、农业、军事、医学和教育等各个应用领域已取得很多研究成果[3-10]。
随着三维建模技术的发展,仿真技术趋向成熟,许多研究者采用仿真技术构建作业环境,用于农业机械设计。文献[11-12]开发了水果采摘机器人虚拟设计与仿真系统;文献[13]开发了交互式联合收获机仿真系统,用于评估新型收获技术;还有许多研究者通过Untiy3D虚拟平台开发虚拟作业环境,用于各类农业装备试验[14-18]。在开发虚拟环境仿真平台时,采用有限元分析、面片操作等技术可模拟出植株变形细节[19-23],但其处理的数据量大,不适用于场景展示;采用静态模型、图形处理器等技术可减少模型数据量[11-18],有利于环境展示,但缺少动态变化。
本文采用Unity3D虚拟平台,以玉米收获机为例,构建虚拟收获环境及其仿真平台,试验分析植株收获期间及其在风雨影响下的受力状态变化,仿真评估收获机械的作业性能,为开发交互式收获机械仿真平台、实现收获机械的设计创新以及整机作业行为和性能的仿真试验提供技术支持。
1 仿真平台架构与原理
以玉米收获机为例,采用Unity3D虚拟平台,以C#编程语言构建收获机械虚拟收获环境及其仿真平台。
1.1 系统结构
收获机械仿真平台系统结构如图1所示,分为6个模块:①视角控制器:作为控制界面,可以控制视角与其他模块参数的输入输出。②收获机械控制器:具有收获机械的各类特性,如割台系统、移动系统与转向系统等。③植株控制器:具有植株模型的各类特性,如植株数据系统、植株生成系统等。④环境展示控制器:具有风、雨效果,可控制风雨大小与方向。⑤模型库:存储收获机械、植株与地形等模型。⑥数据库:存储收获机械的运动参数、收获结果与植株模型的结构参数等。
通过添加Unity3D物理碰撞组件,结合虚拟物理引擎,可模拟收获机械割台与植株模型互动状况,以及实现风雨对植株的影响作用。

图1 收获机械仿真平台系统结构图Fig.1 System structure of harvest equipment simulation platform
1.2 视角漫游模式的选择
视角变化是影响虚拟沉浸度与评价虚拟环境效果的重要部分[15]。一般分两类视角漫游模式:自动漫游与人工漫游。
自动漫游即视角沿着设定好的路径与角度进行平移与旋转,适用于非交互性的展示。本文在展示全景时使用自动漫游模式,其步骤如图2a所示。先在高处进行俯视,展示环境分布概况;然后,视角高度下降至适合高度“抬头”——从俯视渐变为平视,环视一周展示全景近况;最终视角移动至正对收获机械,并将视角中心锁定为收获机械,进入人工漫游模式。

图2 自动漫游流程与人工漫游示意图Fig.2 Process diagrams of automatic and manual roamings
人工漫游是人机交互的重要组成部分,主要观察对象是收获机械与植株,重点是收获机械与植株的交互状况。以收获机械为视角中心,利用鼠标控制视角旋转与远近,键盘辅助控制视角平移,如图2b所示。设鼠标水平方向的移动量为D,通过转换系数S将鼠标的水平移动量转换为视角相对于中心的旋转量θ和视角自身水平旋转角φ,φ与θ定义为
φ=-θ=-DS
(1)
(2)
式中 [xyz]T——视角在空间的平移矩阵,m
r——相机与中心点间在水平面的投影距离,m
[xkeyboardykeyboardzkeyboard]T——键盘控制视角平移的平移矩阵,m
2 虚拟收获环境构建
对于虚拟环境构建,三维模型是其重要基础[9]。研究重点为收获仿真,需构建收获机械与植株的仿真模型,同时还需构建行为控制模型实现两者的交互。
2.1 收获机械模型
以某收获机械传动系统及其变速箱为设计原型,如图3所示。该联合收获机可用于多种谷物收获,且带有拨禾轮的割台结构有利于观察收获状况;变速箱分慢8挡、快8挡与倒8挡共有24挡变速,可提供多种行进速度的选择。

图3 仿真原型Fig.3 Model prototype
收获机械由大量的部件与零件组成,且每个部件含大量零件,而在虚拟环境中,每个可视对象均需要网格信息与纹理信息,包括顶点信息、面片索引信息等数据。在虚拟环境中按照收获机械实际的复杂程度显示占用的数据量太大。因此,去除非观测的部件与零件,收获机械模型主要分成车体模块、割台模块与功能模块。车体模块包括车体外壳、车轮等外观部分。割台模块包括拨禾轮、切割刀具等收获部分。功能模块包括收获机械的物理组件与脚本组件,如刚体组件、碰撞体组件、车体移动脚本与割台控制脚本等,如图4所示。

图4 收获机械模型Fig.4 Harvest equipment model
2.2 虚拟植株模型
植株由茎秆、叶子和果实构成,为了模拟植株的收获状态,根据植株的流变特性,利用虚拟弹簧与虚拟墙构建植株模型,使其能够根据风雨作用力或碰撞发生相应的变化。
2.2.1植株茎秆模型
农业物料可通过弹性体、黏性体与塑性体的组合模拟其实际流变特性[23]。本文采用麦克斯韦模型(Maxwell model)模拟植株流变特性,模型由一个弹簧和一个粘壶串联组成,可表示物料应力松弛过程,如图5a所示。Unity3D中的弹簧关节组件可以设置弹力组件与阻尼组件,可用弹簧关节组件构成麦克斯韦模型模拟植株的变形状况,其定义为
(3)
式中ε——应变
σ——应力,Pa
E——物料的弹性模量,Pa
η——物料阻尼系数,Pa·s
t——时间,s
有限元分析是物料仿真研究惯用方法[19,21],细化模型网格,可将弹性元件散布到微小单元模拟实际物料变化状况。因此,效仿有限元仿真方法——离散梁法[19],采用圆柱体刚性杆与虚拟弹簧连接构成植株茎秆模型,如图5b所示,可通过圆柱体数量调整植株占用数据量。

图5 植株茎秆模型Fig.5 Plant stem model
2.2.2虚拟墙
茎秆模型受力会出现大间隙,设置虚拟墙限制茎秆每节圆柱体的分离。在茎秆每节圆柱体连接处设置虚拟墙面,将圆柱体限制在墙面中间。
2.2.3植株模型
将建好的叶子与果实模型添加在茎秆模型上构建出植株模型,利用阵列操作可构建成组的植株模型,如图6所示。

图6 植株模型构建Fig.6 Plant model construction
2.3 收获机械、风雨与植株的交互
2.3.1收获机械与植株作业行为建模与交互规则
虚拟对象的行为表达可由行为模型与认知模型构成。行为模型是虚拟对象对外部变化的直接反应,所模拟的行为应符合现实世界中的基本运动和行为规律;认知模型是虚拟角色对获取的信息进行分析、决策执行过程的一种描述。
根据收获作业状况,将行为控制模型分为不具备认知的应激行为与基于认知的反馈行为。应激行为是对象本身特性的体现,如刚体、碰撞体等特性,可视化结果为植株与收获机械根据重力系统在环境平台上停留、植株受力后产生偏移等现象;反馈行为是认知系统对外部变化的判断与推理,根据推理结果指导对象行为表现,可视化结果为植株被割刀割断、进入收获口的植株会消失等现象。一个外部变化可引起模型多部分的行为表现,多个行为融合形成作业现象,如图7所示。

图7 行为控制模型Fig.7 Model of behavioral controls
反馈行为可形成行为推理规则,设行为推理规则是规则R的集合[26],定义为
R={R1,R2,…,Rn}
(4)
对任意行为有如下规则描述:根据第i个规则,对条件Fi推理并决策,决策结果传输到执行节点输出行为Ai,与其他行为产生的可视化现象为Pi,定义为
Ri:IFFiTHENAiSHOW ASPi(i=1,2,…,n)
根据收获状况,收获机械与植株的交互行为推理规则描述如下:
R1:IF 启动割台 THEN 拨禾轮按照设定好的扭矩转动 AND 割刀触发器开启 SHOW AS 拨禾轮转动可拖拽植株,割刀可切割植株,不会被植株阻碍前进。
R2:IF 植株与割刀接触 THEN 计算植株切割处位置 AND 植株切割处圆柱体的连接解除 SHOW AS 植株可被割刀割断。
R3:IF 植株进入收获口 THEN 计算进入植株中果实数量,消灭植株,释放数据 SHOW AS 植株消失,收获量增加。
根据行为推理规则,建立收获机械与植株的交互规则,如图8所示。根据收获作业流程,收获机械先利用拨禾轮滚动限制植株位移;然后,割刀与植株接触,解除植株切割处的连接,使植株根部留在地面上,上部被拨禾轮拖拽入割台;割台螺旋推运器带动植株送往收获口;最后,当植株被送入收获口,计算其中果实模型数量即收获量数据,并将进入收获口的植株消灭以释放数据。

图8 收获机械与植株的交互规则Fig.8 Interaction rules between harvesting equipment and plants
2.3.2风雨与植株的交互行为
为模拟出真实环境的复杂条件,设计了风雨效果。环境对植株主要的影响是风雨作用力,风作用力是无形的方向力,雨作用力是液滴碰撞植株产生的力。风雨对植株的影响是植株模型受风雨的力产生的应激性反应,可视化结果为顺着风、雨的方向变形。
将风、雨两者均转换为无形的方向力,且雨的展示效果通过Unity3D的粒子动画系统实现。设定风的初始方向为水平向前,雨的方向为垂直向下,风雨对植株的作用力定义为
(5)
式中 [FxFyFz]T——植株茎秆每节圆柱体的各向受力,N
q——风对植株的均布载荷,N/m
进一步激励和支持企业加大研发投入,以前沿引领技术、现代工程技术、颠覆性技术创新作为突破口,提高知识产权的创新能力,把创新型企业当作发展目标,发展自主核心技术。同时,鼓励企业积极在全球产业链中进行知识产权布局,可以通过建立海外代工厂消减加征关税影响,或者利用提高技术许可费从而提高海外同类产品价格的方式有效反击“301调查”。
Lsection——植株茎秆每节圆柱体的均布载荷长度,m
ψ——风力在水平面上与向前矢量的夹角,rad
φ——风力在垂直面上与垂直向下矢量的夹角,rad
N——雨的数量等级对应的载荷,N
C——植株叶面接触面积系数
3 仿真试验与结果分析
3.1 试验设计与方法
为验证构建的植株模型和虚拟收获环境符合收获仿真需求,并可用于收获机械作业行为及性能的仿真试验,首先应用所构建的收获机械仿真平台进行验证试验。验证试验后,进行不同条件下的收获仿真试验,评估收获机械的作业性能。仿真试验设计如下:
(1)风雨作用下植株的状态变化试验
为验证所构建的植株模型可模拟植株受力弹性变化,将风、雨作用力均转换为无形的方向力,选取方向力为1 N,进行风雨对植株作用的模拟试验。试验后,统计植株不同位置(将植株由下往上分成4段)的变形数据,分析植株在风雨作用下的状态变化和变形特点。每组试验重复20次。
为模拟玉米的收获行为过程,选取收获机高低2挡行进速度(0.124 m/s和0.939 m/s)进行收获仿真试验,试验过程观察收获行为、收获过程的漏果、漏节和植株被甩飞的状况。每组试验重复5次。
(3)收获机械对植株的收获性能试验
选取收获机械行进速度和植株密度为试验因子分别进行单因素收获试验,考虑试验因子对收获机械的收获性能影响,行进速度按照1204型变速箱设置5个挡位,分别为0.124、0.156、0.231、0.358、0.939 m/s;植株密度设置3个水平,分别为4.6、9.2、18.4株/m2。每组试验重复20次,试验后统计收获个数,计算漏果率。漏果率计算式为
(6)
式中ωf——漏果率
qT——果实总数量
qS——收获果实数量
3.2 结果分析
3.2.1风雨作用下植株的变化
风雨作用下同一排植株的位移和速度随时间变化的曲线具有相似性,图9是中间位置植株的位移和速度曲线。

图9 风雨作用下植株变化曲线Fig.9 Variation curves of plants under influence of wind and rain
由图9可见,在风雨作用下,植株各段向力方向偏移,节点越高偏移幅度越大,而且偏移速度越大;偏移值达到最大后(此时速度为0)发生弹复现象,植株逐渐恢复原态;整个偏移过程,植株的速度变化趋势类似于正弦曲线。因此,本文所构建的植株模型可模拟植株受力弹性变化。
3.2.2收获过程中的植株状态
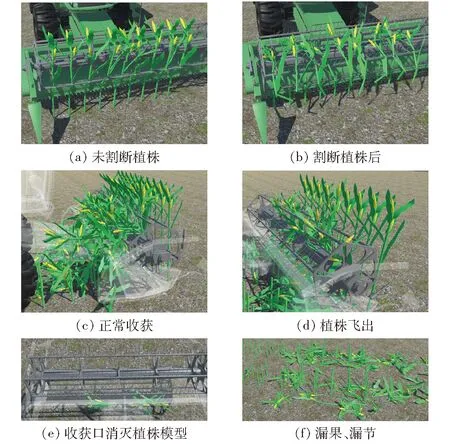
图10 虚拟收获仿真Fig.10 Simulation of virtual harvest situation
植株收获行为观察试验结果如图10所示,其仿真收获过程符合收获作业流程:首先拨禾轮先限制植株,然后割刀割断植株,接着植株被拨禾轮拽入割台由螺旋推运器送往收获口。正常收获状态如图10c所示,期间会出现漏果、漏节的情况(图10f)。收获机行进速度过高时,会出现植株被甩飞的状况(图10d)。试验表明,植株模型符合收获仿真需求,可用于收获机械作业行为及性能的仿真试验。
3.2.3收获机行进速度和植株密度对漏果率的影响
图11为不同植株密度下收获机行进速度对漏果率的影响曲线。由图可见,漏果率随着行进速度的提高而快速下降,但速度超过0.385 m/s时下降缓慢,而且植株密度越高,漏果率下降越缓慢。仿真结果与文献[28-30]的结论一致。进一步方差分析表明,行进速度和植株密度均对收获机械的收获性能影响显著(P<0.01)。
4 结论
(1)借鉴有限元仿真分析方法,将植株茎秆分成多个圆柱体,利用虚拟弹簧和虚拟墙构建植株模型,模拟其受力状态;同时,根据作业状况建立行为控制模型,分为不具备认知的应激行为与基于认知的反馈行为,根据行为推理规则形成交互规则,实现收获机械与植株之间的交互。

图11 不同行进速度下收获漏果率Fig.11 Harvesting fruit loss rate at different travel speeds
(2)多组收获仿真试验表明,虚拟环境建模可靠,农业装备模型运行正常,与植株交互效果真实;所构建仿真平台有效,漏果率随着收获机行进速度的提高而快速减小,植株密度越高,漏果率下降越缓慢,符合实际收获规律。
(3)构建的收获仿真平台可进行收获机械作业性能评估。
猜你喜欢
科学大众·小诺贝尔(低幼)(2024年2期)2024-12-31 00:00:00
房地产导刊(2022年10期)2022-10-18 08:01:32
音乐天地(音乐创作版)(2022年1期)2022-04-26 13:51:40
装备制造技术(2021年5期)2021-08-14 01:44:22
人大建设(2019年11期)2019-05-21 02:55:00
农业机械学报(2019年4期)2019-04-29 02:20:48
汉语世界(The World of Chinese)(2018年4期)2018-10-20 10:46:20
畜牧与饲料科学(2018年5期)2018-06-13 12:03:48
新农业(2016年13期)2016-08-16 12:12:42
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:52
