永磁同步电机驱动太阳翼扰动力矩建模与仿真
2019-08-13 02:11:14于登云王光远郑照明月
宇航学报 2019年7期
于登云,王光远,郑照明月
(1. 中国航天科技集团公司,北京 100048;2. 北京空间飞行器总体设计部,北京 100094;3.北京航空航天大学航空科学与工程学院,北京 100191)
0 引 言
卫星上存在多种扰振源,诸如动量轮、控制力矩陀螺、制冷机组件、太阳翼及其驱动机构等[1-4]。卫星在轨运行过程中,这些扰振源所产生的微振动会对其成像质量和指向精度等关键工作性能产生较大的影响。高轨遥感卫星相对于低轨卫星,其相机成像曝光时间显著延长,因此对低频微振动更为敏感。而太阳翼驱动机构(Solar array drive assembly,SADA)驱动太阳翼在轨运行过程中所产生的扰振在低频区具有分布密集和特性复杂的特点,且主要表现为扰振力矩[5]。因此,为使高轨遥感卫星获得更高分辨率图像,必须研究SADA驱动太阳翼在轨运行过程中所产生的扰振力矩。
步进电机具有定位精度高、无累计误差、驱动线路简单等特点,是较为成熟的SADA驱动方案。在高轨卫星中,一般选取两相步进电机,采用开环控制模式驱动太阳翼。但步进电机由电脉冲信号驱动,不可避免地存在扰动[6-9]。近年来,越来越多的SADA驱动组件选取永磁同步电机替代传统的步进电机以提升转动平稳度。永磁同步电机通常需采用位置环、速度环、电流环三环闭环控制,控制稳定性受到负载特性、电机参数等多种因素影响,其扰动力由控制、电磁、结构相互作用形成,需开展精细化的设计与分析以取得良好的应用效果。
针对驱动组件与柔性负载的动力学耦合问题,国内外学者开展了大量的研究。文献[5]研究了太阳翼非理想因素导致的多向耦合振动等因素对SADA与太阳翼耦合系统动力学特性的影响;文献[10]对步进电机驱动单自由度振子引起的扰振力矩进行了仿真分析;文献[11]研究了步进电机设计参数对耦合系统动力学特性的影响;文献[12]提出了两种前馈输入补偿驱动方案,以降低动力学耦合对驱动稳定性的影响。文献[13]对采用步进电机作为驱动部件的SADA与柔性负载耦合特性进行了系统建模和仿真研究。但这些研究工作大多针对步进电机开展,永磁同步电机的驱动方式与其有较大差异,动力学耦合特性也不相同。
本研究建立了永磁同步电机驱动柔性负载的扰振模型,设计了模拟柔性负载,对SADA驱动该柔性负载的扰振力矩进行了仿真分析。本研究所得的成果为高轨遥感卫星成像质量分析和振动抑制提供了有力的支撑。
1 SADA驱动刚性负载方程
SADA驱动刚性负载时,根据永磁同步电机的原理,其数学模型在推导过程中,需做如下假设[14]:
1)气隙均匀,磁回路与转子无关,即各相绕组的自感、绕组间的互感与转子位置无关。
2)在转子上没有阻尼绕组,永磁体没有阻尼作用。
3)忽略铁磁材料饱和、磁滞和涡流的影响。
4)忽略温度和频率变化产生的影响。
5)绕组中感应电波波形是正弦波。
图中OA,OB,OC为三向定子绕组的轴线,电流流过三向定子绕组时会产生一个旋转的磁场。而两相相位正交对称的绕组通以两相相位差90°的交流电时,也能产生旋转的磁场。所以三向定子绕组可以等效为一个两相系统。d轴定义为永磁同步电机永磁体N极的指向,q轴定义为沿逆时针方向超前d轴90°电角度。在dq坐标系下,永磁同步电机的定子电压方程为:
(1)
式中:uq为q轴电压,iq为q轴电流,ud为d轴电压,id为d轴电流,R为三相定子电阻,Lq为q轴电感,Ld为d轴电感,θ为转子转角,ψf为永磁体基波励磁磁场链过定子绕组的磁链,pn为极对数。
磁链方程为:
(2)
电磁转矩方程为:
Te=pn[ψfiq+(Ld-Lq)idiq]
(3)
永磁同步电机的运动方程为:
(4)
其中,Te为电磁转矩,B(dθ/dt)为转子的摩擦转矩,J0为电机转子等效到转轴上的转动惯量,Tr为电流噪声引起的力矩波动,Tl为负载作用于电机转子上的转矩,当SADA驱动刚性负载时,其运动方程为:
(5)
式中:J1为刚性负载绕SADA转轴的转动惯量。
永磁同步电机的矢量控制方法主要有:id=0控制、cosφ=1控制(φ为定子电流矢量与电压矢量的夹角)、恒磁链控制、最大转矩/电流控制、弱磁控制、最大输出功率控制等。其中,id=0控制所需电流最小,单位定子电流可获得最大转矩,该方法应用于SADA驱动控制具有明显优势。使用电流环、速度环、位置环三环PID控制的SADA数学模型可写为:
(6)
Te=kmiq
(7)
e=θ0-θ
(8)
(9)
(10)
式中:Ce为电动机反电动势系数,ki为电流反馈系数,km为电动机力矩系数,θ0为输入角位置信号,θ为实际转角,e为转角误差,r为控制指令,KP,KI,KD为PID控制参数,ku为功率放大倍数,kd为速度环放大倍数,kv为速度环反馈系数。
2 SADA驱动太阳翼耦合系统方程
将太阳翼结构划分为内部自由度u及界面自由度v两部分,如图2所示。图2中,C点为柔性负载与SADA的连接点,其自由度只有绕Y轴的转动θ,激励只有绕Y轴的力矩Tl。
柔性负载的振动方程可写为:
(11)
根据固定界面模态综合法,选取柔性负载的分支模态集:
(12)
其中,φl表示固定界面的分支保留主模态集,l表示保留的主模态阶数。ψc表示对全部界面坐标的约束模态集。主模态集可根据式(13)计算,并进行质量归一化后获得:
(Kuu-ω2Muu)φul=0
(13)
约束模态集可根据如式(14)计算获得:
(14)
记柔性负载的模态矩阵φ所对应的模态坐标为p,则有:
(15)
将振动方程变换至模态坐标下,可得
(16)
其中,
(17)
(18)
(19)
将式(15)与式(4)~(10)联立可得永磁步进电机驱动柔性负载的电磁-力学耦合方程,如式(20)~(26),求解可得SADA运行过程中对基础的反作用力矩。
(20)
Te=kmiq
(21)
e=θ0-θ
(22)
(23)
(24)
(25)
(26)
3 仿真与分析
为进一步研究SADA驱动太阳翼运行过程中扰动力矩主要诱发因素及其特性,设计了一个柔性负载,用于模拟真实太阳翼的力学特性,并对SADA驱动该柔性负载产生的扰振力矩进行仿真与分析。
3.1 柔性负载
柔性负载是由铝梁组成的框架结构,其具有大尺寸、大惯量、前三阶模态频率低的力学特征,其结构示意图参见图3。其中绕SADA转轴为Y向,垂直框架平面为Z向。采用商用软件Nastran建立了其有限元模型并进行了模态计算。建模过程中在柔性负载与SADA的连接点处布置一个节点,约束该节点的6个自由度进行模态计算。柔性负载的主要参数见表1。
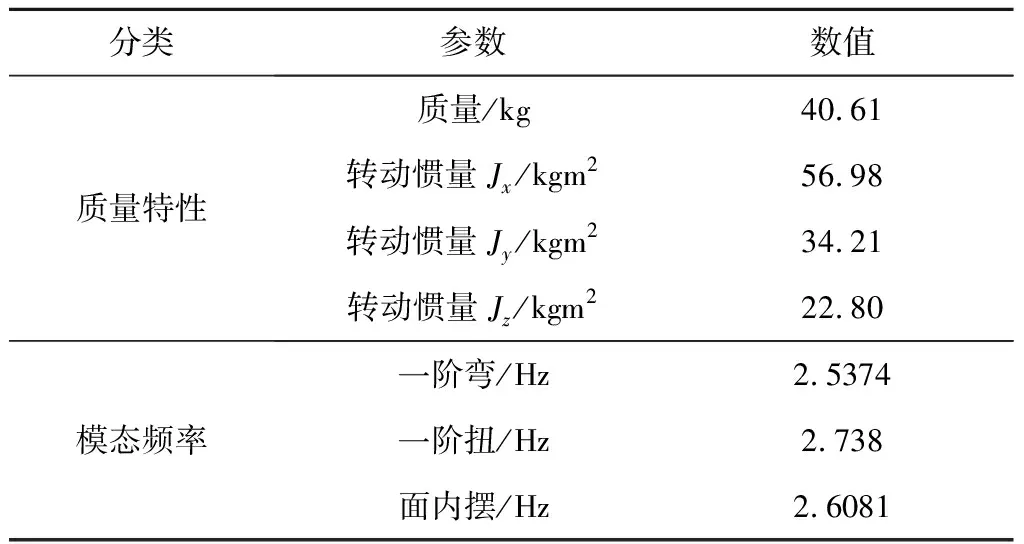
表1 柔性负载主要参数Table 1 Parameters of flexible payload
3.2 仿真结果与分析
采用四阶龙格-库塔方法求解式(20)~(26)组成的常微分方程组,可得到耦合系统运动过程的扰动力矩,表2给出了本文所讨论SADA的仿真参数的初始设定数值。
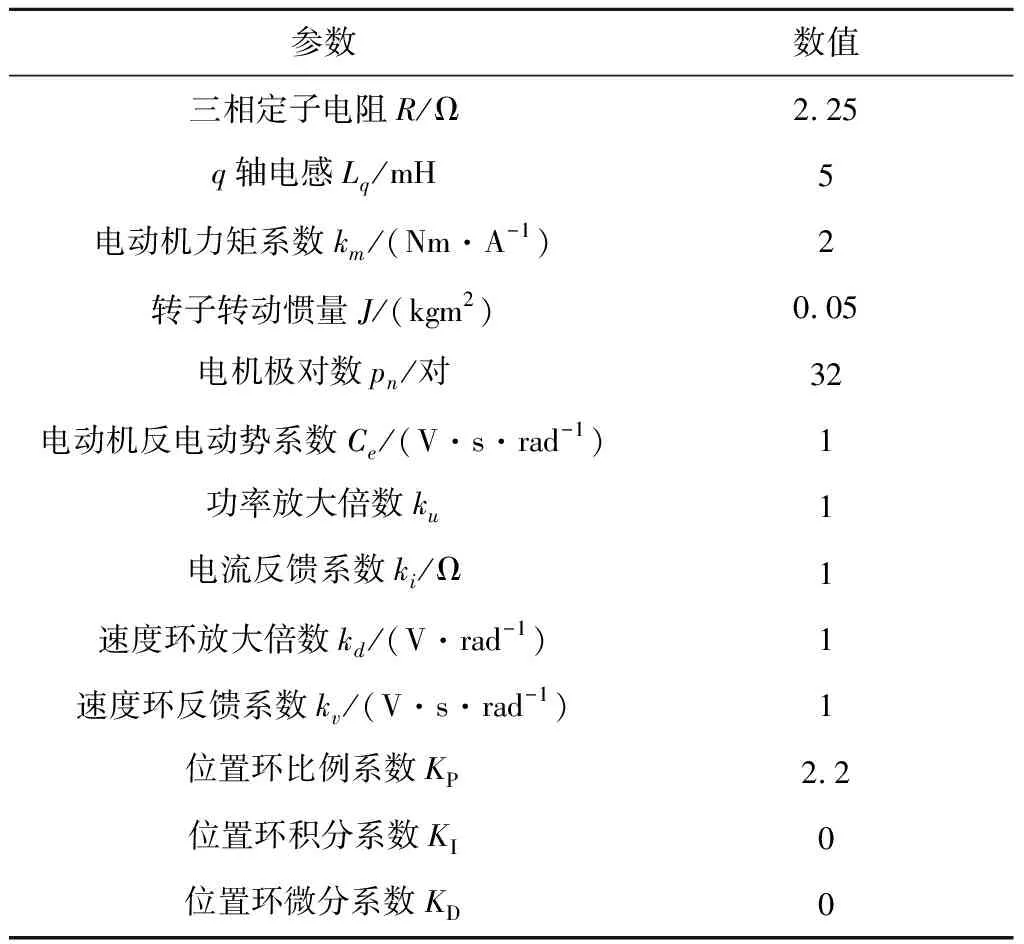
表2 仿真参数Table 2 Simulation parameters
图4给出了理想状态下的仿真结果,当控制参数选区恰当,且电噪声为零时,SADA的扰动力矩几乎为0,即永磁同步电机不存在类似于步进电机的固有扰动,负载在理想状态下匀速转动,对安装界面无反作用力矩。
图5和图6给出了考虑电机相电流中存在电噪声时的扰动力矩仿真结果,电噪声按照均方根 0.1 V的白噪声给出。可见,叠加入噪声后,会在安装界面产生明显的扰动力矩,且其主要频率成分为2.75 Hz,与柔性负载一阶扭转频率相近。说明在噪声作用下,转轴输出力矩中形成了随机激励,与柔性负载产生了动力学耦合作用,激发起其扭转方向的振动,从而形成扰动力矩。因此,改善SADA控制器的电气设计,降低驱动线路的电噪声是降低SADA扰振的主要技术途径之一。
在工程实践中,太阳翼入轨后,在高低温、真空放气等复杂环境因素作用下,动力学特性会发生一定程度的变化,而这种变化难以在地面准确预测。因此,SADA控制律的设计面临一定的不确定性,在入轨初期往往难以达到理想的控制效果,在反复进行在轨参数调整后,SADA转角仍可能存在小幅度的稳态波动。图7和图8给出了控制参数选取不当导致SADA转角存在小幅波动时扰动力矩。可见,SADA与太阳翼耦合作用下,对安装基础的反作用力矩也呈现近似正弦规律的波动。这种力矩波动频率较低,可能会造成整星姿态稳定度难以满足要求。
4 结 论
本研究以高轨遥感卫星的SADA为例,通过电磁坐标变化和利用固定界面模态综合法分别得到了SADA驱动刚性负载以及SADA驱动柔性负载的控制方程,建立了SADA驱动太阳翼所产生的扰振力矩模型。在此基础上,设计了一个模拟太阳翼动力学特性的柔性负载,并对SADA驱动该柔性负载运行过程中所产生的扰振力矩进行了仿真和分析。结果表明:SADA驱动柔性负载运行过程中所产生扰振力矩主要由两个原因引起,即:1)电流噪声引起的力矩波动;2)控制参数选取不当引起的转角波动。降低SADA扰振力矩的主要措施包括:1)改进控制器设计,降低线路电噪声;2)改进控制律设计,降低SADA转角稳态误差。本研究成果为高轨遥感卫星成像质量分析和振动抑制提供了有力的支撑,并可推广应用于其它航天器。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
电子制作(2017年1期)2017-05-17 03:54:12
光学精密工程(2016年3期)2016-11-07 09:03:49
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
云南电力技术(2015年2期)2015-08-23 01:31:52
大电机技术(2015年5期)2015-02-27 08:22:28
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29