
改进ICP算法在无人机煤堆体积测量的应用研究
2019-08-09 02:14杨耀权江鹏宇
自动化与仪表 2019年7期
彭 蹦,杨耀权,江鹏宇
(华北电力大学 控制与计算机工程学院,保定 071003)
现代火力发电厂中,煤场的储煤量与发电煤耗量息息相关,目前最主要的煤场储量获取方式为体积密度折算法[1]。因此,煤场煤堆体积的盘算往往需保持在厘米级精度,以精确核算电厂发电效益。
随着三维测量技术的高速发展,许多专家学者在不同领域进行了相关的应用和研究。高精度三维测量取决于更高比例尺(1∶2000或1∶1000)的数字高程模型 DEM(digital elevation model[2]。其中,无人机倾斜摄影和激光测点扫描作为2种三维模型测量新技术,在煤堆体积测绘过程中已被人们广泛使用。
无人机倾斜摄影和激光扫描技术针对不同场景的三维测量已日趋成熟,前者可实现多角度影像采集,保证三维模型精度,提升建模测量效率,但数据冗长、自主匹配速度慢、空洞修补具有主观性;后者使用简单,操作安全,可精细化三维模型[3],但后期处理软件效率低,人为误差影响大。综合分析无人机倾斜摄影和地面三维激光测点扫描技术各自的优缺点,在此研究了倾斜摄影与全站仪三维扫描技术在煤堆体积测量中的融合应用,取长补短,研发适用于电厂煤堆工程测量的新技术,最大限度提升煤堆体积测量的效率和精度。
1 基于点云数据的煤堆三维测量
1.1 无人机倾斜摄影技术
无人机倾斜摄影技术采用搭载高清摄影头的小型飞行器,在低空环境下对煤场煤堆进行固定云台角度拍摄,得到一组具备一定航向重叠度和旁向重叠度的煤堆图像,随后利用软件处理获取实景三维模型成果,完成煤堆业内数据分析。该技术广泛应用于军工、测绘、数字城市等领域。
基于无人机倾斜摄影技术的煤堆体积测量流程如图1所示。

图1 基于倾斜摄影的无人机煤堆体积测量技术Fig.1 Coal pile volume measurement technology based on tilt photography of drone
无人机倾斜摄影测量技术是目前电厂煤堆体积测量的一种新型技术,它能够多角度、大面积采集煤场影像数据,保证煤堆测量精度,提升测量效率,但基于无人机倾斜摄影获取煤场煤堆三维数据存在一些尚未克服的技术性问题,如:影像数据自主匹配速度慢、地形地貌复杂情况下无GPS信号时,无人机不可控等。
1.2 三维测点扫描技术
三维扫描技术又称实景复制技术,它利用激光测距的原理,通过漫反射收集被测目标表面的三维几何、纹理数据等信息[4]。此类技术广泛应用于历史文物保护、医学工业测量等精密程度高的领域。
全站仪三维测点技术的核心为脉冲激光打点测距,通过对激光的发射和接收、延时估算得到脉冲波来回时间间隔,通过式(1)求解出激光发射基站和标靶之间的距离。即:

式中:c为光速;Δt为脉冲波来回时间间隔;Δd为激光发射基站和标靶之间的距离。
利用毫米级精度全站仪采集像控点三维坐标的操作步骤如图2所示。

图2 像控点三维坐标采集流程Fig.2 3D coordinate acquisition process of image control points
为保证煤场每个像控测点所获三维坐标数据准确可靠,外业数据采集过程中应采用正直扫描以减小扫描方向与被扫煤堆夹角过大带来的误差[5]。全站仪扫描基站采用实时动态RTK(real time kinematic)载波相位差分技术,求差解算平面坐标,通过水准测量技术获得高程数据坐标[6]。
该技术操作简单,不受GPS信号影响,获取的三维RTK数据能达到毫米级精度。
1.3 ICP算法及改进
点云配准的最终目的是通过一定的旋转和平移变换将不同坐标系下的2组或者多组点云数据统一到同一参考坐标系下,获得被测物体的完整几何信息。在数据配准算法中,研究者使用最多的也是最为经典的是ICP算法。
在建模过程中,有些物体是完全一样的,只是空间位置发生变化[7],这就为无人机倾斜摄影和全站仪三维测点技术的ICP算法配准融合提供可行性理论依据。
ICP算法的基本原理是:分别在待匹配的目标点云P和源点云Q中,按照一定的约束条件,找到最近邻点(pi,qi),然后计算出最优匹配参数R和t,使得误差函数最小。误差函数E(R,t)为

式中:n为最邻近点对的个数;pi为目标点云P中的一点;qi为原点云Q中与pi对应的最近点;R为旋转矩阵;t为平移向量。
ICP算法能保证源点云和目标点云的精准匹配,但是配准速度较慢。故在此采用基于NDT(normal distributions transform)的ICP点云配准算法[8-9],即在ICP算法配准之前,先通过NDT算法对点云距离及姿态进行粗调整,有效提升配准速度。
在基于NDT的ICP算法背景下,无人机倾斜摄影与全站仪三维测点技术点云融合的基本步骤如下:
步骤1利用无人机倾斜摄影技术获取目标点云P,并在其中取若干点集pi∈P;
步骤2均匀划分目标点云P的三维模型空间,形成若干格子,每个格子最少包含6个点;
步骤3计算每个格子的中值向量ln和协方差矩阵Cn;

式中:xh为每个格子的点集;m为每个格子中点的个数。
步骤4利用格子中的每一个数据点xh的概率密度函数ρ(xh),通过正态分布变换得到正态分布模型N(ln,Cn),形成分段光滑区间表示形式:
步骤5在目标点云P中,将待配准点集pi每一个点按照最优转移矩阵G进行变换,完成目标点云距离及姿态粗调整。其中,最优转移矩阵由最优值分数值G(p)计算得到:
步骤6利用全站仪三维扫描测点技术获取像控点三维坐标,像控点集构建源点云Q;
步骤7找出源点云Q中对应点集qi∈P,使得‖qi-pi‖为最小值;
步骤8计算R和t,使得误差函数最小;
步骤9利用步骤8求得的R和t,对pi使用四元数算法进行旋转和平移变换,得到新的对应点云数集为

步骤10计算pi′与对应点集qi的平均欧式距离:

步骤11若d小于某一给定的阈值或者大于预设的最大迭代次数,则停止迭代运算;否则返回步骤7,直至满足收敛条件为止。
1.4 技术融合应用
针对煤场测区特点,试验采用无人机倾斜摄影技术大范围采集煤场点云数据,合理布设像控点位置,然后将全站仪像控测点坐标融入无人机倾斜摄影点云模型中,根据新模型三维数据完成对煤场煤堆的体积测量。其中,ICP技术数据融合的流程如图3所示。

图3 ICP算法点云融合流程Fig.3 ICP algorithm point cloud fusion process
2 煤堆建模测量应用
2.1 测区概况
煤场试验区位于贵州省贵阳市某电厂3号煤场,长约160 m,宽约76 m,测区呈长方形,其核心区域均由煤堆构成。周边区域均为挡煤围墙,还包括有路灯、楼房、铲煤车等地物。试验现场如图4所示。


图4 不同角度下的测区工程现场Fig.4 Survey site at different angles
2.2 数据获取及分析处理
(1)测量条件与数据获取
试验采用DJI大疆精灵Phantom 4 RTK无人机飞行器,建模精度满足厘米级要求。该无人机飞行器主要技术指标和性能参数见表1。

表1 无人机飞行器主要性能参数Tab.1 Main performance parameters of UAV aircraft
设置飞行高度50 m,航线重叠度50%,旁向重叠度45%,云台角度60°。依据以上参数设置,此次试验针对3号煤场煤堆区域,飞行时间约25 min,获取原始煤堆图像324张。大疆无人机航摄过程自主采集POS数据,获取影像外方位元素。再将324张煤堆图像进行有效像片筛选,剔除无煤堆目标影像,最终获得301张有效像片。
将煤堆图像进行畸变校正,使用运动模糊算子motion filter,利用维纳滤波法复原模糊图像,完成去抖动化处理[10],处理前后比对结果如图5所示。
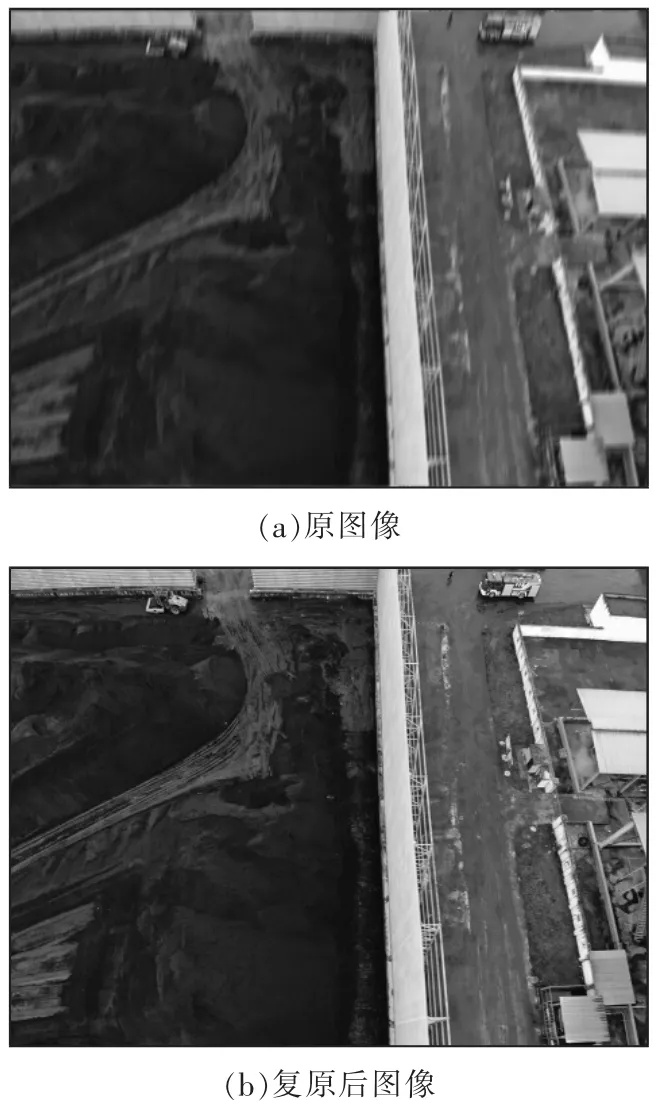
图5 维纳滤波法处理前后的对比Fig.5 Wiener filtering method before and after comparison
(2)扫描试验
全站仪针对3号煤场煤堆进行像控测点扫描试验。因考虑到煤场煤堆的特殊情况,为保证一定的精准度,中间凹陷段及煤堆斜坡区域需集中铺设多个像控点。其中,像控点设定共计14个,采集到的像控点三维坐标数据见表2。试验过程中,记录仪自动换算像控点相对三维坐标数据。
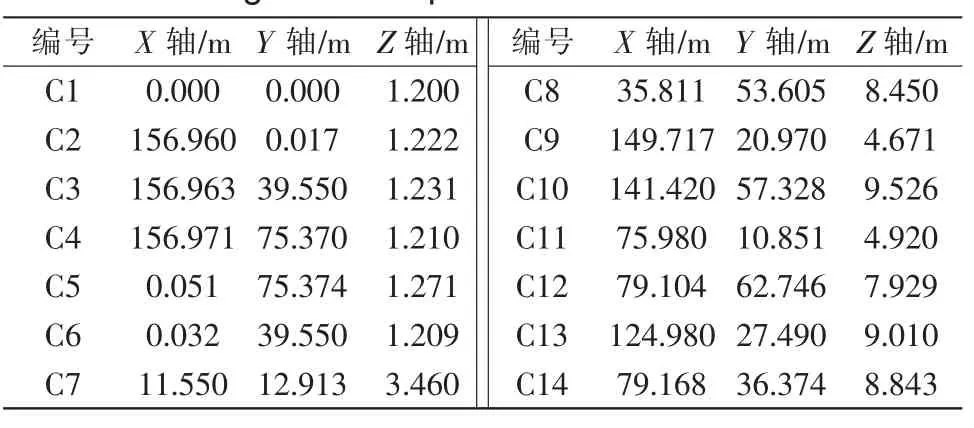
表2 像控点相对三维坐标Tab.2 Image control point relative 3D coordinates
(3)煤堆建模
综合上述数据,通过无人机倾斜摄影技术得到的煤堆POS数据,使用光束法整体平差煤堆影像区域,空三建立不规则三角网格TIN,形成白模区域后得到煤堆DEM模型[11]。
结合全站仪扫描得到的像控点三维RTK数据,在open CV平台上采用基于NDT的改进ICP算法,将全站仪像控点三维坐标数据融入无人机倾斜摄影煤堆DEM模型中,提升配比准确度,图像无效化程度得以抑制,最终得到更加精细的煤堆DEM合成模型,并以USGS格式保存。
ICP算法技术融合前后的煤堆点云密度分布如图6所示。
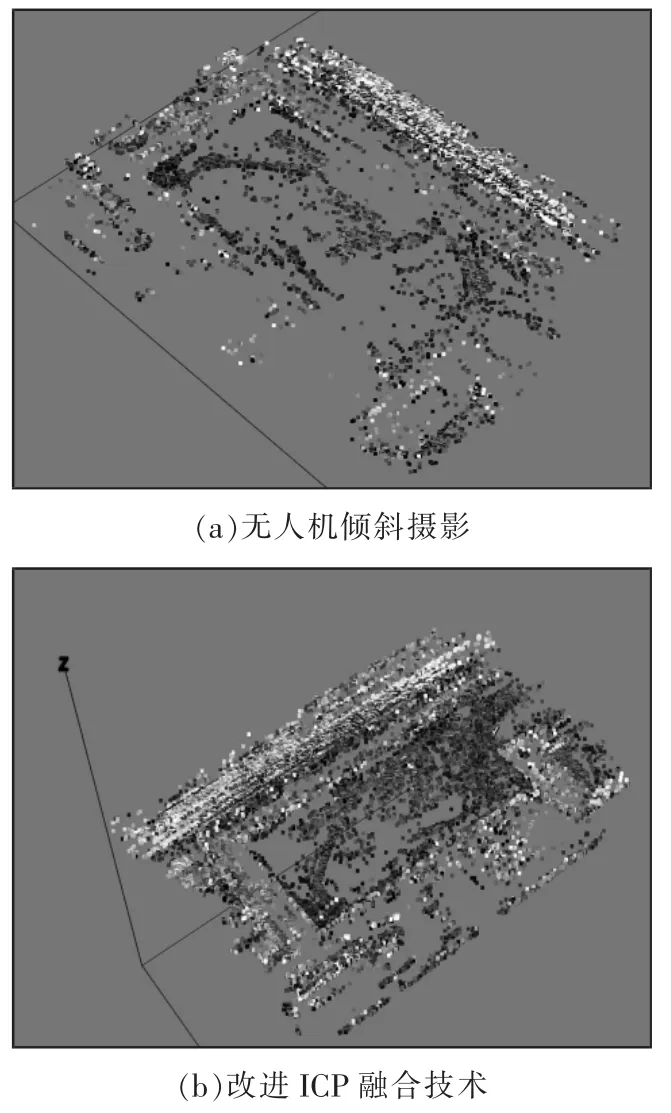
图6 煤堆点云数据密度Fig.6 Coal pile point cloud data density
改进ICP算法技术融合后的点云密度显著增加,煤堆RTK三维数据得到的模型真实性效果较好,白模区域无明显空洞,如图7所示。
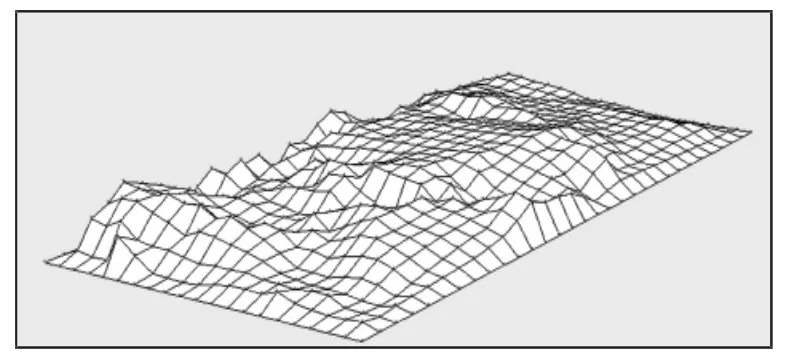
图7 煤堆白模区域效果Fig.7 Coal pile white mode area effect
利用Pix4D mapper软件纹理贴图,获取煤场区域煤堆数字正射影像图DOM(digital orthophoto map),最终形成真实煤堆数字地表模型DSM(digital surface model),建模效果对比如图8所示。

图8 煤堆三维重建模型Fig.8 3D reconstruction model of coal pile
可知,传统无人机倾斜摄影技术下煤堆数据配比错误致使图像无效化严重,引起模型空洞多,建模效果不理想。而通过ICP算法合成的煤堆DSM模型,可以发现,ICP算法能有效地将像控点三维数据点融入无人机倾斜摄影煤堆DEM模型中,提高空洞自主修补能力,提升图像有效配比,点云密度增加,从而模型的精细化程度及纹理特征得以大大改善。
(4)精度对比分析
为确保试验结论的准确性,在煤场试验区,可取编号为C7—C14等8个像控点作为核准点进行精度校验,分别对比实测全站仪RTK三维坐标、无人机倾斜摄影DOM模型点坐标以及ICP技术合成的DOM模型点坐标,得出ICP技术合成前后核准点处的平面误差和高程误差。无人机倾斜摄影和ICP技术融合下的煤堆三维模型在核准校验点处的平面误差ΔX,ΔY及高程误差ΔZ见表3。

表3 模型误差精度对比Tab.3 Model error precision comparison
表中,平面误差ΔX1和ΔY1,以及高程误差ΔZ1为无人机倾斜摄影技术下的模型误差;平面误差ΔX2和ΔY2,以及高程误差ΔZ2为ICP融合技术下的模型误差。
ICP融合技术下的煤堆DOM模型最大平面误差为43 mm,最大高程误差为63 mm,与传统无人机倾斜摄影技术相比,加入本文算法的ICP融合技术相对误差减小80%以上,满足煤堆体积测量1∶1000精度比例尺要求。同时,在ICP算法的配准融合下,模型的数据点均差与方差均大幅度减小。为了更加直观的表现,分别绘制2种技术下的精度对比曲线,如图9所示。
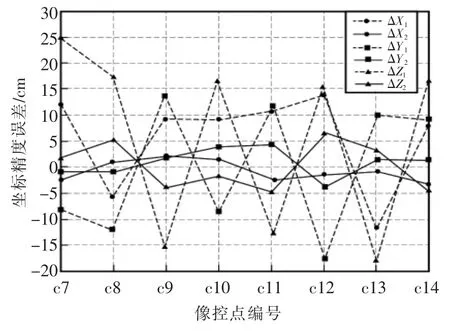
图9 误差精度对比曲线Fig.9 Error accuracy comparison curve
通过仿真试验结果的分析可知,无人机倾斜摄影和全站仪三维测点扫描技术在改进ICP算法的融合应用下,能显著改善煤堆的模型平滑度及真实感,修补模型空洞,提高煤堆体积的计算精度,为火力发电厂的运行、调度及效益核算等提供技术支撑。
3 结语
以上详细叙述了无人机倾斜摄影技术和地面全站仪三维测点扫描技术的基本理论及步骤;提出了基于2类技术的改进ICP点云融合方法,有效增加了煤堆点云密度,自主修补传统无人机倾斜摄影技术的煤堆模型空洞,提升建模效率,提高煤堆三维模型的分辨率及精度。然而,在建模速度上并不理想,还需要从区域层次ICP算法的角度再加以改进,从而得到速度更快、适配性更强的融合配准方法,保证三维模型的高效化建立。此外,倾斜摄影和测点扫描技术在无人机煤堆体积测量领域中的融合应用,或许能够克服某些建筑物对目标区域的限制和遮挡,实现煤堆无死角化数据采集及分析,这将是煤堆体积测量领域内又一个全新的研究方向。对于三维重建领域,尚存在比较大的进步空间,在广阔的商业价值背景下,着重加强三维建模的相关研究,不仅有助于模式识别、视觉图像处理等技术的发展,而且必将推动人工智能技术迈向新纪元。
猜你喜欢
上海节能(2022年12期)2022-12-29
电力设备管理(2022年16期)2022-09-21
新型工业化(2022年5期)2022-06-17
能源工程(2021年2期)2021-07-21
建材发展导向(2021年9期)2021-07-16
安徽冶金科技职业学院学报(2021年2期)2021-07-09
矿产勘查(2020年1期)2020-12-28
中国工人(2020年5期)2020-11-17
矿业安全与环保(2020年5期)2020-11-03
水电站设计(2020年4期)2020-07-16
