
基于扭矩控制的减速断油逻辑对车辆驾驶性的影响研究
2019-08-07 06:19张世昊吴琼吴代明吴哲李玉龙
汽车实用技术 2019年14期
张世昊,吴琼,吴代明,吴哲,李玉龙
基于扭矩控制的减速断油逻辑对车辆驾驶性的影响研究
张世昊,吴琼,吴代明,吴哲,李玉龙
(安徽江淮汽车集团股份有限公司技术中心,安徽 合肥 230601)
为提高自动挡车型的驾驶性能,以应对舒适性要求日益严格的汽车消费市场,文章设计了一种基于扭矩模型的汽油机断油逻辑,通过使用此逻辑合理配置标定参数,可以实现断油过程以及断油后恢复供油过程的扭矩平滑过渡,进而可减缓断油引起的传动系扭振,达到优化驾驶舒适性的目的。该控制基于发动机管理系统实现。
减速断油;发动机管理系统;车辆驾驶性;扭矩控制
1 概述
如何提高车辆的舒适性,提升车辆的品质感,一直是整车研发的主要课题,尤其是随着汽车智能化的发展,汽车车载电子电气件数量的增加,发动机控制器、变速箱控制器以及其他整车节点的交互日趋频繁,提升车辆舒适性已不单单依靠整车硬件单方面的优化了,控制器之间交互应答的控制优化也可以带来较好的驾乘体验效果。
对于搭载自动挡的车型而言,变速箱控制器(下文简称TCU)是使用发动机控制器(下文简称ECU)发送的发动机飞轮端输出扭矩进行其自身传扭控制的。而在车辆滑行减速工况中,为了保护发动机以及节油,ECU均有减速断油逻辑,而此时若断油过程以及断油后恢复供油过程中扭矩值不准确、扭矩过渡不平顺,会直接影响到TCU的扭矩跟随控制,特别是在断油后恢复供油过程中,由于此时发动机端转速较低接近怠速工况,车速较低变速箱端也准备实现控制模式的切换,ECU和TCU的控制模式的过渡切换加上扭矩的不准确、不平顺往往会带来传动系的扭振,进而会带来体感的驾驶性不舒适感。
本文基于发动机控制模型对减速断油模式下的扭矩模型子模块进行优化和扩展,本文设计的为一款四缸汽油发动机的减速断油模式下的扭矩模型策略,使得断油过程以及断油后恢复供油过程的扭矩可平滑过渡,进而可减缓断油引起的传动系扭振,达到优化驾驶舒适性的目的。
2 扭矩控制下减速断油的模型设计
2.1 扭矩控制下减速断油模型的硬件设计
扭矩控制下减速断油模式的硬件结构包含如下,ECU为控制硬件,输入硬件包括:进气歧管压力传感器、进气温度传感器、冷却液水温传感器、曲轴位置传感器、前氧传感器、后氧传感器、车速传感器、油门踏板传感器等,输出硬件包括:节气门总成、喷油器1~4、点火线圈1~4、CAN网络收发器等。

图1 减速断油模式下扭矩模型结构
其中,输入硬件用来表征车辆的工况和发动机负载状态,输出硬件用来执行断油逻辑,并将计算得到的扭矩信息通过CAN网络收发器广播给其他整车CAN节点,其他节点可以使用此扭矩信息作为自身控制的输入。
2.2 扭矩控制下减速断油模型的控制逻辑
当前选用的商品化发动机控制模型为工程中广泛应用的平均值模型,优点在于平均值模型对于发动机物理模型可使用代数方程或微分方程来表达,其使用平均缸内指示压力(IMEP)作为扭矩控制的标志值,在期望扭矩正向到实际执行扭矩的路径上,并不去讨论各缸之间的物理差异,减小了的运算量。同时,当进行反馈控制时,由于发动机曲轴位置信号的判缸时序,又可以区分每缸不同的点火角参数,故可以较好的应对每缸的差异。
若扭矩控制不对断油模式进行约束,整个断油以及断油后恢复供油过程,均为粗犷的按某步距进行逐缸断油,断油以及断油后恢复供油过程无法得到准确的扭矩信息。
当扭矩控制对断油模式进行约束时,相比于非扭矩控制下的减速断油模型,其对断油过程也做扭矩分析,并使用扭矩作为中间量去规整并控制执行器包括点火角角度、空燃比、节气门开度、喷油器喷油脉宽等。
同时,基于扭矩来控制减速断油工况,并不需去直接干涉执行器的终端控制,而是使用期望的扭矩信息进行控制。其会在逐缸断油和恢复供油过程中,通过点火效率参数对四缸点火角进行控制,之后通过断油步距时间子系统的扭矩参数来调试出期望的扭矩状态,再通过点火角子系统,得到相应的点火角参数。如此做,断油过程中的扭矩计算精准,且对于扭矩的调整也方便应用。喷油脉宽、空燃比的综合计算按原模型中的扭矩路径进行计算,这里不再讨论。
具体软件构架如下图2所示:

图2 减速断油模式下扭矩模型软件架构
首先,断油模式下期望平均缸内指示压力由于有点火角的介入,点火角并不是等于MBT点的点火角,故和平均缸内指示压力存在差异,由平均缸内指示压力(即IMEP)和断油模式下期望平均缸内指示压力通过系列运算得到点火效率系数。

图3 计算点火角效率参数修正系数框图
如上图3,使用断油模式下期望平均缸内指示压力和倒拖扭矩,通过断油步距时间子系统,可以计算出对点火效率系数的修正系数,并输入给点火角子系统。
点火角效率参数修正系数涉及发动机功率的计算,具体如下推导:
其中,发动机的指示功,从缸内指示压力和飞轮端输出扭矩的能量守恒考虑,得到如下(1):

功率的定义是单位时间内所做的功,对于多缸发动机,如果每个循环耗时为(s),则每个气缸的指示功率乘上工作缸数就得到发动机的指示功率,公式如下:

同时,功率由飞轮端输出定义出发,为飞轮端扭矩和角速度的积分,结合角速度定义,得到瞬态的飞轮端输出定义如下:
由(2)和(3)联立,得到飞轮端指示扭矩如下:

分析公式四,发动机飞轮端指示扭矩T和缸内平均指示压力,存在着和工作缸数i的函数关系。而点火角效率参数修正系数,原理上是由断油模式下期望平均缸内指示压力、倒拖扭矩、逻辑中可标定的扭矩过渡步距共同算得。使用此三者可得到整个断油或者断油后恢复供油的耗时,并将此耗时分割成四份,由断油时当前缸数开始断油,并按缸号3-1-4-2的顺序循环断油,并保证扭矩的平顺。由公式四可得,当出现少缸工作时,缸数会出现减小,进而扭矩参与燃烧的燃烧缸体积会减少,故需要对点火角效率参数进行修正,调节平均缸内指示压力已达到去弥补由于少缸带来的扭矩损失。
点火效率系数的修正系数输入给点火角子系统后,通过和系统中基础点火角进行计算得到各工况下的四缸点火角。同时,此四缸点火角和期望输入信号集合均输入给扭矩控制子系统,得到最终的实际输出扭矩。
3 扭矩控制下的减速断油模型对驾驶性影响
3.1 试验对象
本次试验的试验对象为某一款搭载汽油发动机和六速双离合变速箱的新型SUV车,其已经具备基本的起动、换挡、制动、转向性能,ECU、TCU之间交互信号已经定义完成,ECU、TCU软件处于软件调试和标定的状态。
3.2 非扭矩控制下的减速断油模型的应用弊端
非扭矩控制下的减速断油模型,整个断油过程是按既定的步距和时间间隔进行逐缸直接控制喷油脉宽断油,点火角也并不受扭矩控制。所以,断油过程中的扭矩信息首先其并不准确,同时,扭矩状态也并不方便调试。这样给和自动挡车型交互,带来较大的负面影响。当使用非扭矩控制下的减速断油模型时,断油和恢复供油的过渡阶段,振动传感器测得的振动均较大,且无法方便的标定调试。
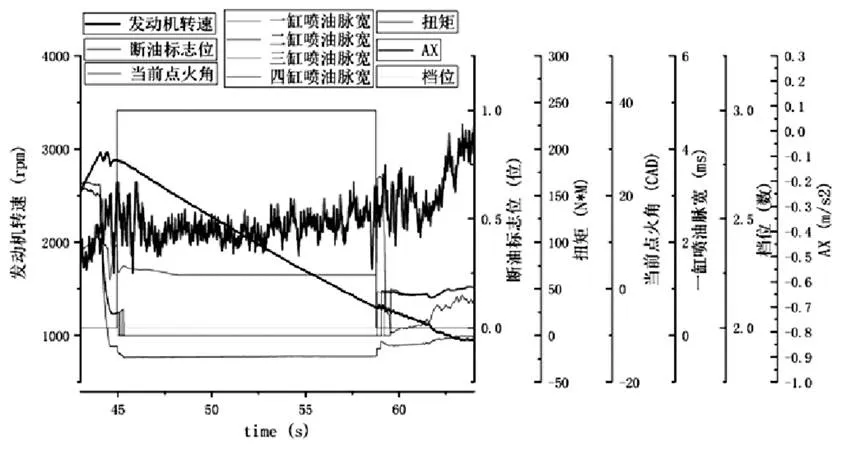
图4 非扭矩控制断油_恢复供油图
如上图,在断油标志位变化时,从供油到断油、从断油到恢复供油两个时间段,发动机转速存在波动,振动传感器的振动值AX均明显变大,振动感强,驾驶性不好。
3.3 扭矩控制下的减速断油模型的实车应用
为保证车辆断油和恢复供油过程中的驾驶舒适性,关键在于发动机断油工况扭矩的精度和可标定性。而此基于扭矩控制下的减速断油模型均具备。
双离合自动变速箱对于扭矩精度的要求,在对断油步距时间子系统进行设计时,为应对不同的断油恢复供油工况,对断油和恢复供油的工况进行分类,区分出不同工况情况。对于断油阶段只有一种情况,即不踩油门。而恢复供油按油门开度的大小分为不踩油门恢复供油、轻踩油门恢复供油、重踩油门恢复工况三种情况。逻辑上对此三种工况分别设置了标定进行处理。断油逻辑标定工况分类如下:
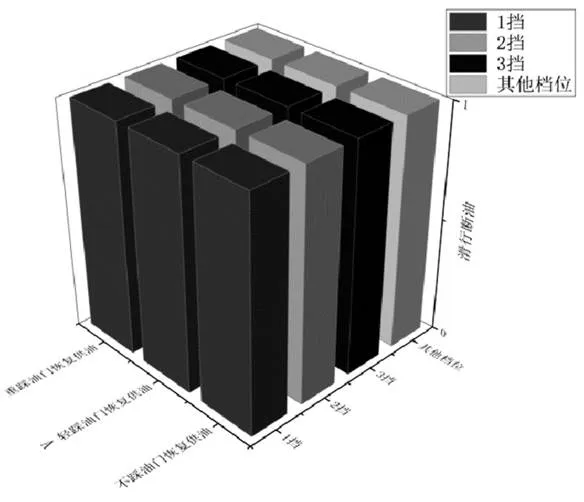
图5 断油逻辑标定工况分类图
如上3D图,对于断油_恢复供油工况一共识别出12种工况,其中需要说明的是,由于一般高挡位的速比较小,收油的加速度变化较小,由断油和恢复供油带来的驾驶平顺性出现问题的概率较低,故逻辑设计时则将4挡和4挡以上均定义到其他挡位中。
且对于断油和恢复供油两个过程,和以上12种工况,故设计了两对、共四个标定表格进行区分,表格如下:
表1 断油扭矩步距表格

表2 断油扭矩时间间隔表格
表3 恢复供油扭矩步距表格
表4 恢复供油扭矩时间间隔表格
本文主要讨论的是此逻辑方式可以保证精准的扭矩交互、并且调试标定方式方便操作性高,并不涉及ECU、TCU为减速断油工况全面的调试标定工作。故对于车辆的应用,并没有将所有转速、所有挡位下的所有12种工况均测试调试,而是选出典型工况进行举例说明。选择的工况为:挡位2挡、滑行断油后的不踩油门恢复供油、轻踩油门恢复供油、重踩油门恢复供油共三种工况。通过调试和标定优化,此三个工况下,扭矩过渡平顺,且振动很小,驾驶性表现优良。具体如下系列图: 图6 扭矩控制断油图 如上图,为断油过程,此时在断油缸数的逐渐变多,和扭矩按既定步距和时间间隔逐渐变小的综合计算下,当前点火角呈现出每次断缸时,均变大以弥补断缸扭矩损失的逻辑。最终得到平滑的扭矩输出,配合双离合自动变速箱的控制。从振动信号AX来看,无明显振动现象,驾驶感觉优良。 相关研究表明,画面感较强或视觉冲击力较强的报道更适合运用VR技术,因此对于一般情况,特别是动态新闻与抽象化较强的经济报道便不适合运用该技术。现今,在选取能将VR技术完美地运用于新闻报道中的题材时较为困难,仅仅适用于娱乐、体育赛事或现场复制性较难的新闻事件中。 图7 扭矩控制不踩油门恢复供油图 如上图,为不踩油门恢复供油过程,此时在断油缸数的逐渐恢复供油,和扭矩按既定步距和时间间隔逐渐变大的综合计算下,当前点火角呈现出每次恢复供油时,均变小以迎合多缸工作的逻辑。最终得到平滑的扭矩输出,配合双离合自动变速箱的控制。从振动信号AX来看,无明显振动现象,驾驶感觉优良。 图8 扭矩控制踩小油门恢复供油图 如上图,为踩小油门恢复供油过程,此时在断油缸数的逐渐恢复供油,和扭矩按既定步距和时间间隔逐渐变大的综合计算下,当前点火角呈现出每次恢复供油时,均变小以迎合多缸工作的逻辑。同时踩小油门时由于恢复供油的步距和时间间隔可以单独调试、人为设置大,故可以呈现较快的扭矩响应。最终得到平滑的扭矩输出,配合双离合自动变速箱的控制。从振动信号AX来看,无明显振动现象,驾驶感觉优良。 图9 扭矩控制踩大油门恢复供油图 如上图,为踩大油门恢复供油过程,此时由于大油门工况的目的是迅速的建立扭矩,故步距和时间间隔会设置的变化很快,控制时,往往体现成四缸同时供油的现象,且点火角也较大的现象。最终得到的扭矩输出精准,以配合双离合自动变速箱的控制。从振动信号AX来看,无明显振动现象,驾驶感觉优良。 4 结论 (1)本文设计了一种基于扭矩的断油逻辑,其嵌套于原ECU逻辑中应用,可实现断油过程中较高的扭矩精度。 教师展示蝗虫、壁虎、蜘蛛、蜥蜴、蜗牛、蚯蚓、鸟、鱼、涡虫、海葵、青蛙、蟾蜍、猫和虎的图片,以此为基础创设问题情境,提出问题:①将这12种动物分为两组,应如何划分?每组有哪些动物?②将每组动物再分类,又可分为哪几类?每类有哪些动物?③请把不同的动物类群按照从简单到复杂的顺序进行排列。④仿照植物分类的图解,小组合作完成上述动物的分类图解(图2)。 (2)从原理出发,考虑划分了12种断油_恢复供油工况,并设计了4个标定表格,普试于所有断油_恢复供油的工况。 (3)此扭矩的断油逻辑,调试标定时可直接控制扭矩,间接控制各执行器,调试标定方式直观、简单、实用。 (4)使用某SUV车型举例,进行典型工况的标定调试优化后,使用此逻辑可以达到较好的驾乘体验。较原逻辑中的非扭矩断油逻辑,有明显的优势。 所设计与匹配基于扭矩的断油逻辑当前已经达到量产化要求,并成功移植应用至多款DCT车型中,倍受客户好评。 参考文献 [1] 王斌.Fuel-Cut策略对WLTC循环排放及油耗影响[J].交通节能和环保:自然科学与工程技术版,2018.10,第14卷,第5期. [2] 尚前明.基于MATLAB的增压发动机动态排放仿真模型研究[J].武汉理工大学学报(交通科学与工程版),2007.08,第31卷,第4 期. [3] 孙坚.驾驶性评价及其仿真方法研究[D].吉林大学硕士学位论文. 2017.06.01. [4] 廖飘.双离合自动变速箱扭矩检测与换挡性能的研究[D].华东交通大学硕士学位论文. [5] 肖骏林.基于平均值模型的柴油机空气系统控制策略研究.[D].西安交通大学硕士学位论文.2018.04.01. [6] 周龙保,刘巽俊,高宗英.内燃机学.[M].北京:机械工业出版社.1998. [7] 周云山,于秀敏.汽车电控系统理论与设计[M].北京:北京理工大学出版社 . [8] 王丹力等.MATLAB 控制系统设计仿真应用[M].北京:中国电力出版社,2007 . [9] 冯渊.汽车电子控制技术[M].北京:机械工业出版社,1999.06. Research on the influence of deceleration and oil cut-off logic based ontorque control on vehicle drivability Zhang Shihao, Wu Qiong, Wu Daiming, Wu Zhe, Li Yulong ( Technical Center of JAC, Anhui Hefei 230601 ) Abstract:To improving the performance of automatic-shift cars driving in response to the comfort requirements of increasingly stringent auto market, this paper designs a model based on torque of gasoline engine oil cut-off logic.It can realize the smooth transition of torque during oil break and the recovery of oil supply after oil break, thus slowing down the torsional vibration of transmission system caused by oil break,in order to optimize driving comfort. The control is based on the engine management system. Keywords: Slow oil cut-off; Engine management system; Vehicle drivability; Torque control CLC NO.: U464 Document Code: A Article ID: 1671-7988(2019)14-86-05 中图分类号:U464 文献标识码:A 文章编号:1671-7988(2019)14-86-05 作者简介:张世昊,就职于安徽江淮汽车集团股份有限公司技术中心。 10.16638/j.cnki.1671-7988.2019.14.027
猜你喜欢
汽车实用技术(2022年2期)2022-02-21
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
汽车零部件(2021年2期)2021-03-05
宇航计测技术(2020年4期)2020-09-10
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
北京汽车(2018年5期)2018-11-07
航运交易公报(2014年10期)2014-04-02
