
一种基于数据复用的雷达对抗知识库设计方法
2019-08-07 08:44刘正堂胡振震
航天电子对抗 2019年3期
孙 健,马 辉, 刘正堂,胡振震
(中国洛阳电子装备试验中心,河南 洛阳 471003)
0 引言
数据是对整个训练过程和效果最直观最有效的反应,通过对历史数据信息的合理分析和挖掘,一方面可以实现对关键信息的查询索引,另一方面也可以给当前训练辅助设计提供一定参考。目前的数据主要为大量非结构化形式,包括装备工作参数、工作图片以及视频等。信息量大、存储方式不规范、缺乏有效的信息挖掘和分析手段,导致数据利用效果并不理想。此外,由于缺乏对人工智能以及大数据思想的利用,现有的组训设计以及战法研究仍以主观经验判断为主,缺乏客观的历史训练数据支撑和验证。为此,有必要探索一种合适的知识库体系构建方法,提高对历史训练数据的利用率。
1 雷达对抗知识库相关背景分析
知识库通过对数据挖掘算法、数据检索算法、规则关联算法以及专家经验知识的集成,将大量原始非结构化的信息梳理为底层子模块信息,依托层层递进、逐层挖掘的模式,形成金字塔体系,实现面向决策者需求的信息支持,如图1所示。

图1 基于历史数据的知识库信息流向
处理大量非结构化数据,需要利用数据挖掘算法来实现,但是目前并没有一个可参考的知识库形式和标准来确定具体的要素特征和挖掘准则[1];在信息检索方面,存在检索量大、检索速度慢的缺陷,难以满足用户需求,因此,需要从索引模式和更新策略综合考虑,构建多维度快速索引方法[2];建立知识库需要构建具体的规则库,将各个知识库条目信息模块进行链路连接,形成决策树[3]。由于国内科研单位对此方面研究较少,因此规则库的建立需要结合具体装备和训练环境,综合考虑多方要素来拟定,以实现与决策树节点的链路因子准确关联组合,将近似的历史雷达干扰效果推送给决策人员。
基于此,本文以雷达对抗领域为例,提出一种基于历史数据的知识库设计方法,以业务需求分析为基础,采用多库结构形式,引入大数据与信息交互思想,构建雷达对抗知识库的基本框架以及子模块,并对关键算法进行了具体设计,为训练数据的高效利用提供了一种新的思路,为组训人员进行训练辅助设计以及相关战法研究提供参考。
2 雷达对抗知识库需求分析
雷达对抗知识库信息来源于历史训练任务中雷达对抗双方数据,主要满足以下三方面业务需求:
1)针对非结构化数据,首先进行数据的分类和要素特征抽取,需要利用数据挖掘算法来实现。通过对杂乱无章的历史数据信息进行合适的挖掘,按照特征及分类标准将大规模的全文形式的信息分解为多个具有要素特征的子模块信息,但是目前并没有一个可参考的知识库形式和标准来确定具体的要素特征和挖掘准则。
2)索引构建以及更新策略决定着是否能够实现信息的快速、准确检索,传统的全文检索方法存在检索量大、检索速度慢的缺陷,而倒排索引的模式虽然可以提高检索效率,但是其检索更新速度较慢,难以满足用户需求[4-5]。因此,需要从索引模式和更新策略综合考虑,构建多维度快速索引方法,在提高检索效率的同时,提高检索的准确度,满足教学训练的需求。
3)建立知识库的主要目的在于基于以往训练的地域、装备、工作方式、工作参数、雷达对抗干扰等信息,结合当前任务部署以及参训装备工作信息,预测出此次对抗可能出现的干扰效果,为导演部以及受训部队领导提供决策支持。为了实现这个目的,就需要构建具体的规则库,将各个知识库条目信息模块进行链路连接,形成决策树[6]。但是基地以及国内科研单位对此方面研究较少,如前所述,规则库的建立应综合考虑多方要素来拟定,以实现与决策树节点的链路因子准确关联组合,将近似的历史雷达干扰效果推送给决策人员。
3 雷达对抗知识库架构与子模块设计
3.1 雷达对抗知识库设计思路
根据雷达对抗知识库需求,本文拟采用“多库结构”形式,将历史任务信息分为多个子模块建立相应的库信息,利用数据挖掘算法,提取装备信息、地域信息、工作信息、干扰信息、抗干扰信息、环境信息及干扰效果信息作为要素特征信息,构建子信息模块,形成知识条目,组建知识库;在此基础上,从索引模式和更新策略综合考虑,构建多维度快速索引方法,实现对历史知识条目信息的查询;依据要素特征信息之间的关联关系以及雷达对抗理论和经验知识,构建规则库,以每条知识条目中的要素特征信息作为节点,通过链路因子连接,形成决策树,通过人机交互,量化当前任务部署以及参训装备工作信息等关键要素,构建基于链路因子的索引模式,根据近似程度输出历史训练中干扰效果信息作为预测结果,为指挥员决策提供参考。
3.2 雷达对抗知识库基本架构
雷达干扰知识库基本架构主要包含历史信息模块、信息挖掘模块、子信息模块、库信息模块、规则模块、快速索引模块、决策链路模块、人机交互模块,其基本架构如图2所示。

图2 雷达对抗知识库基本框架
3.3 雷达对抗知识库子模块设计
1)历史信息模块。该模块主要是以Excel表格形式存储历史任务筹划文档和装备数据采集文档,其中任务筹划文档包括装备部署信息表(包含经度、纬度信息)、参训装备列表、装备工作方式表、雷达对抗装备干扰方式表、电磁环境设置计划表。装备数据采集文档主要包括装备实际训练所采集的数据。
2)信息挖掘模块。该模块主要是对非结构化信息的分层次挖掘,具体包含两方面内容:第一,作为历史信息转化为子信息的中间桥梁,根据历史信息模块大量的非结构化数据,提取要素特征,从受训方关心因素综合考虑,拟定装备、地域、工作、干扰、抗干扰、环境、干扰效果等作为要素特征,采用数据挖掘算法,分别挖掘相应的要素特征信息,导入子信息模块;第二,作为子信息转化为库信息的纽带,采用二次挖掘算法,根据时间要素等匹配条件,将子信息中各要素特征信息整合为知识条目,分条存储至库信息模块。
3)子信息模块。该模块是构建知识库的关键所在,是提炼出知识条目信息的直接前提。该模块包含7个要素特征信息库,分别是装备信息库、地理信息库、工作信息库、干扰信息库、抗干扰信息库、环境信息库、干扰效果信息库。
①装备信息库,即参训双方雷达装备以及雷达对抗装备。
②地理信息库,即根据装备部署图以及GIS地理关系,获取所有装备的距离和方位关系。
③工作信息库,对于雷达装备而言,包括工作方式、信号样式、频率、重频、脉宽;对于雷达对抗装备而言,主要包括工作方式。
④干扰信息库,主要是针对雷达对抗装备而言,包括干扰方式、中心频率、带宽、距离拖引、角度欺骗、假目标数量等。
⑤抗干扰信息库,主要是针对雷达装备而言,包括抗干扰方式。
⑥环境信息库,主要是背景电磁环境的构设,分为轻度环境、中度环境和重度环境。
⑦干扰效果信息库,主要是针对雷达装备,包括直接干扰效果信息和采取抗干扰措施后干扰效果信息两部分,需要关联历史任务信息中的多媒体文档信息。
4)库信息模块。该模块是整个雷达干扰知识库的核心所在,它将数据挖掘所得到的知识条目信息一一存储,不仅包含参数信息,还包含图片信息,能够从多个角度、多个层面完整地反映任一对抗双方在不同情况下的训练效果,而且还支持后续任务信息录入,能够不断地补充完善,以便形成完备的知识库。
5)规则模块。该模块主要涉及各种规则信息,包括索引要素匹配规则和决策要素匹配规则,是知识库信息模块与快速索引模块和决策链路模块的中间连接环节。对于索引要素匹配规则,按照字、词以及语句的递进关系,构建与知识条目中要素特征信息的关联规则,同时量化要素权重关系以及字、词以及语句和要素特征的相似度,定义合适的规则,引导快速索引模块完成对知识条目关键要素信息的查询工作;对于决策要素匹配准则,将当期任务关键信息进行量化,提取要素特征信息,与知识条目中的要素特征信息进行匹配,制定合适的关联规则,引导决策树依据知识条目节点的链路因子进行干扰效果要素的搜索,输出与当前任务信息最为近似的结果。
6)人机交互模块。该模块是雷达干扰知识库的人机交互模块,根据决策员的需求,在训练拟定过程中输入装备要素、地理要素、工作要素、干扰要素、抗干扰要素、环境要素和干扰效果要素中的几项或全部,一方面用于对所需历史信息的快速索引,另一方面用于获取近似历史信息条件下的干扰效果,包括受干扰等级和受干扰图片以及相关干扰效果指标,为决策员制定训练设计方案提供参考。
4 知识库关键算法设计
4.1 信息挖掘算法设计
涉及到对历史数据的一次和二次挖掘,考虑到要素特征信息的重要性,该部分拟采用回声状态网络ESN,作为挖掘和分类提取要素特征信息的关键工具。
ESN是一种全新的递归型神经网络,采用储备池作为内部网络,能够激发复杂多样的非线性状态空间,大大提高了非线性映射能力,且在模型训练过程中,储备池内部的连接权值保持不变,显著降低了运算复杂度,有效避免了传统神经网络易陷入局部极小的现象[7-8]。
作为ESN的核心网络,储备池中包含大量随机生成的神经元,这些单元往往具备记忆能力,以稀疏的方式相互连接。ESN的拓扑结构如图3所示。
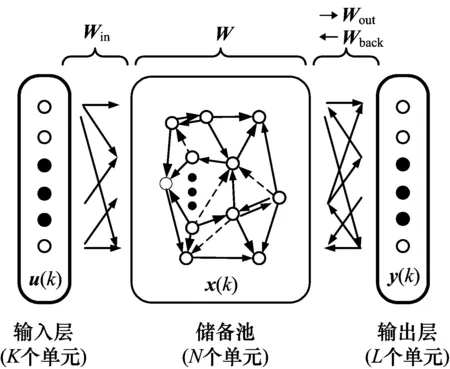
图3 ESN网络结构图
如图3所示,u(k)为输入层输入向量,x(k)为储备池状态向量,y(k)为输出层状态向量。ESN的状态更新方程为:
x(k+1)=f(Winu(k+1)+Wx(k)+Wbacky(k))
(1)
式中,f(·)表示神经元的激励函数,x(k)和y(k)分别表示第k时刻的状态向量和输出向量,u(k+1)为第k+1时刻的输入向量,Win、Wback分别表示输入连接权值矩阵和反馈连接权值矩阵,W表示储备池内部的连接权值矩阵。ESN的输出方程为:
y(k+1)=f(Wout(u(k+1),x(k+1),y(k)))
(2)
式中,Wout为输出权值矩阵。ESN在训练及预测过程中仅改变Wout,其它权值矩阵固定不变,能够大大降低模型的训练量,提高运算速度。通过状态更新方程以及输出方程,ESN能够利用储备池中的神经元激发出复杂多样的非线性空间,减少了局部极值现象的出现,提高数据分类和关键信息提取的能力。
4.2 快速索引算法设计
不同于传统的索引方法,快速索引对索引形式以及索引更新策略同时具有更高的要求。为了实现对知识库信息中大量非结构化历史数据的快速索引,可以采用基于理解与规则量化要素的索引形式和动态哈夫曼树索引更新策略相结合的方式。
基于理解与规则量化要素的索引形式,通常是根据关键词的语法以及相应的规则对词进行详细的分析和判断,对不同词要素的重要性进行量化,以此进行逐层多维度索引。工作流程基本上由以下部分组成,即在获取关键词的过程中,系统会通过模拟人脑学习的机理,推理有关词的句法以及语义信息,分析词与词之间的关联度,调用索引规则信息库中的规则信息,引导其量化不同词的优先程度,从而提高搜索效率。
动态哈夫曼树[9](DHT)是一颗k叉树,利用哈夫曼树的构造方式来进行索引的合并,树中所有的节点构成倒排索引的数据集合,树中的每个节点代表一个子索引,从树的最底部到树的根节点把树的高度分成H层,同时满足下述规则:
规则1:第m层(0≤m≤H)节点的数目大于0或者小于k(k≥2);
规则2:引入一个参数p(p≥k),定义每一层节点容量大小;
规则3:不在同一层的索引节点不能进行合并;
规则4:设Vm,j为第m层中节点j(0≤j≤k-1)的容量,则在第m层的节点要素信息数量限制为:
pm≤Vm,j/s≤pm+1
(3)
式中,s为树节点的衡量因子。
规则5:当第m层中节点合并而产生的新节点进入第m+1层,会导致第m+1层出现碰撞进而再需要合并,这种情况下2次合并一次进行。
通过分析可知,规则4可以确保大小相差不大的节点都落在树中的同一层上,参数k能够有效控制参加合并的子索引的个数;规则5能使那些原本需要多次才能合并完成的节点能够一次合并完成,从而可以减少合并过程的次数。在没有数据删除的情况下,第m层上的节点合并后产生的新节点有可能会直接进入第m+1层或停留在第m层(由p决定),当存在数据删除的情况时,多个子索引合并后产生的新节点的所占空间大小可能会比合并之前要小,合并完成后产生的新节点至少要下推一层,通过上述条件形成的这种结构完全可以通过动态增删操作,进一步提高检索效率和检索准确性。
4.3 决策链路预测算法设计
与快速索引模块相比,决策链路模块是知识库高阶应用层次,体现了知识库信息的人工智能操作层面。该模块的原理流程如图4所示。
工作原理具体可描述为:通过对人机交互输入的当前任务关键信息的分析和索引,从知识库中提取要素特征信息,作为一个个的知识节点,根据小世界网络理论[10]可知,世界上任何信息节点之间都有直接或间接的关系,这些关系可形成一种拓扑结构网络,图4中节点间的虚线即表示了二者间可能存在的关联关系,综合考虑规则库中的匹配信息、各要素的主成分贡献信息以及专家经验信息,定义链路因子,作为同一层级两类信息节点的决策依据,经过决策树的层层决策,最终得到决策链路,将与之近似的历史干扰发送至人机交互模块。

图4 决策链路模块工作原理流程图
5 结束语
针对目前训练数据使用效率不高、缺乏智能分析与挖掘手段的问题,本文引入大数据思想,探索了一种基于历史训练数据的雷达对抗知识库设计方法。从训练任务实际出发,系统地分析梳理了雷达对抗知识库设计的业务需求;采用多库结构形式,设计了雷达对抗知识库总体框架、相关子模块以及信息挖掘和处理的关键算法;为历史训练数据的有效利用探索了一种新思路、新方法,可为训练设计和电子对抗战法研究提供一定参考。
猜你喜欢
火力与指挥控制(2022年8期)2022-09-16
北京大学学报(自然科学版)(2022年1期)2022-02-21
移动通信(2021年5期)2021-10-25
新生代(2018年16期)2018-11-13
科技创新导报(2016年27期)2017-03-14
电脑知识与技术(2016年31期)2017-02-27
——基于与QuestionPoint的对比
新世纪图书馆(2014年11期)2014-02-23
读写算·高年级(2009年3期)2009-11-16
