
基于CarSim与Matlab的泊车路径跟踪控制模型设计*
2019-08-07 06:19李臣旭马世典江绍康李仁鹏窦银宇
汽车实用技术 2019年14期
李臣旭,马世典,江绍康,李仁鹏,窦银宇
基于CarSim与Matlab的泊车路径跟踪控制模型设计*
李臣旭1,马世典2,江绍康1,李仁鹏3,窦银宇3
(1.江苏大学汽车与交通工程学院,江苏 镇江 212013;2.江苏大学汽车工程研究院,江苏 镇江 212013;3.江苏中虎汽车智能系统有限公司,江苏 镇江 212133)
文章针对现有自动泊车系统路径跟踪效果差的问题,首先基于车辆运动学模型和实车参数在CarSim中搭建试验模型车,并设置相应的输入变量与输出变量,然后联合Matlab设计路径跟踪控制模型,最后进行了联合仿真实验,实验结果证明了文章所设计跟踪控制模型的有效性。
运动学模型;路径跟踪控制模型; 联合仿真实验
前言
智能汽车作为当今汽车产业和技术发展的主流方向,一直是国内外各大汽车厂商和科研机构的研究重点。自动泊车作为智能汽车自动驾驶技术的一个关键组成部分,已成为业界关注和研究的热点,而泊车路径跟踪控制作为自动泊车技术实现的关键一环,很大程度上影响着泊车成功率和泊车精度[1]。
为了实现对泊车路径的良好跟踪,国内外专家学者早已进行了大量的研究,文献[2]基于制导的路径跟踪控制理论提出了一种能保证受控闭环系统全局一致渐近稳定的跟踪控制率;文献[3-4]分别基于模糊控制算法设计了不同的路径跟踪控制器并对车式移动机器人进行了控制实验;文献[5-6]基于非光滑控制理论设计了泊车路径跟踪控制器。虽然上述路径跟踪控制算法都能够有效提升路径的跟踪控制精度,但先进控制算法对单片机系统运算速度和存储都提出了极高的要求,难以实现工程化应用。
本文基于车辆运动学模型和实车参数在CarSim中搭建试验模型车,联合Matlab设计泊车路径跟踪控制模型,通过控制输入输出变量进行联合仿真实验,实验结果验证了本文所设计控制模型的有效性。
1 车辆的运动学模型的建立
泊车过程是一个极低速的(通常低于5km/h)运动过程,车轮低速滚动时车辆本身不会发生侧向滑动,侧向力可忽略不计,因而没有车轮侧偏角。所以,在实际运用中,通常对汽车运动模型进行相应的简化,即以车辆的运动学模型为泊车运动研究基础,建立车辆泊车运动学模型,本文针对低速泊车场合建立如下简化模型[7]。
如图1所示,(x,y)、(x,y)分别为车辆前轴中点和后轴中点坐标,为轮距,为车辆轴距,为车辆的行进方向,表示车辆的航向角,为阿克曼转角,取顺时针为正。

图1 泊车过程的简化汽车模型
车辆的运动学方程可用下式表示:

将公式(1)对时间t积分,则可得到车辆后轴中点的运动轨迹方程:
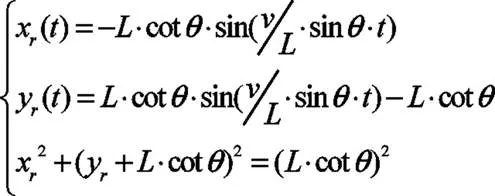
根据自车参数和各点坐标位置的几何关系,求出四个车轮及车辆包络点的运动轨迹,以此推算出泊车从起始至结束整个过程中的车辆实际运动路径。
2 基于Carsim 搭建试验模型车
参照市面上中大型SUV车型参数,详见表1。
表1 试验车的部分相关参数
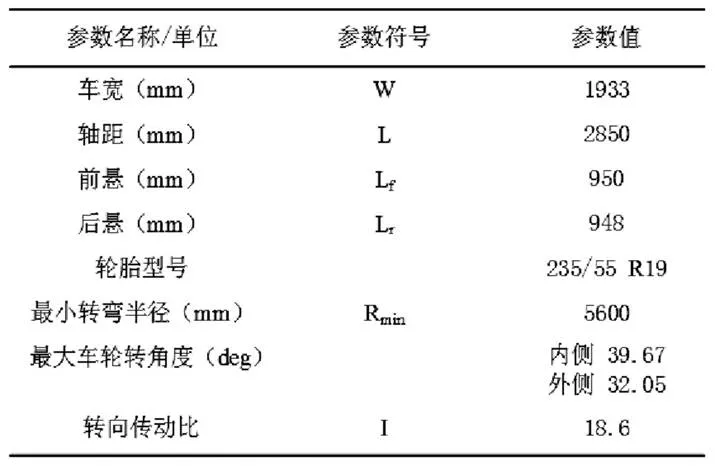
在Carsim中参照上表中的参数搭建试验模型车,主要设置模型车的车长、车宽、轴距、最大车轮转角、最小转弯半径以及车轮半径等参数,其余参数均采用软件的默认设置,如图2所示为Carsim模型车的基本参数设置界面。
为方便搭建Carsim与Matlab的联合仿真模型,对相应的输入变量与输出变量进行选择,图3所示为Carsim输入变量:1.油门开度;2.制动轮缸压力;3.方向盘转角。图4所示为Carsim输出变量:1.左后轮轮速;2.右后轮转速;3.车辆横摆角速度;4.车辆中心纵向速度;5.方向盘转角;6.车辆前轴坐标;7.车辆前轴坐标;8.车辆横摆角。

图3 Carsim输入变量设置
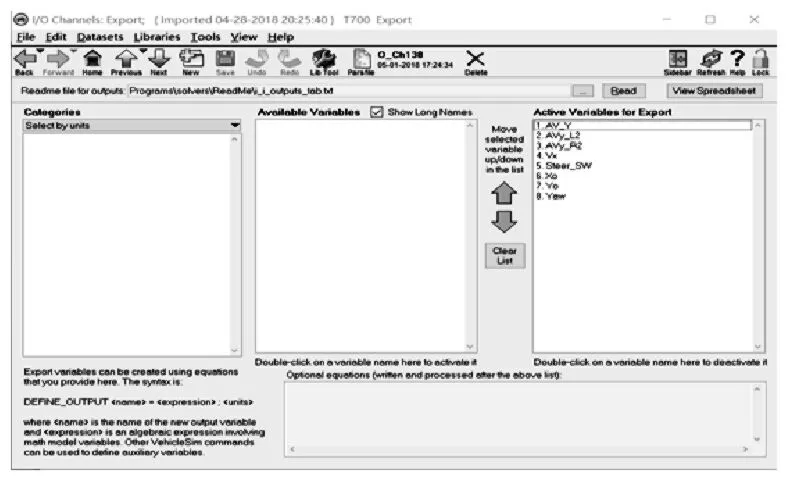
图4 Carsim输出变量设置
3 路径跟踪控制模型
利用State flow模块设计泊车路径与相应车速,并将其嵌入Simulink路径规划模型中,基于Carsim与Matlab联合仿真平台设计路径跟踪控制模型,该模型由四个主要模块组成,分别是路径规划模块、后轴中点坐标输出模块、全局坐标系转化模块及理想车速输出模块,如图5所示。采用坐标转换方法,将车辆后轴中点作为参考点跟踪理想路径,采用PID算法分别控制Carsim三个输入变量,减小跟踪误差的产生。

图5 路径规划与跟踪控制模型
4 联合仿真实验
通过Carsim与Matlab联合仿真实验验证路径跟踪控制模型的作用,实验结果如图6所示。图中红色曲线为设计好的理想泊车路径,蓝色曲线为模型控制下的车辆跟踪轨迹。能明显看出在本文所设计跟踪控制模型的作用下,整个泊车过程中模型车能较好地跟踪理想泊车路径,最大偏差不超过15cm。
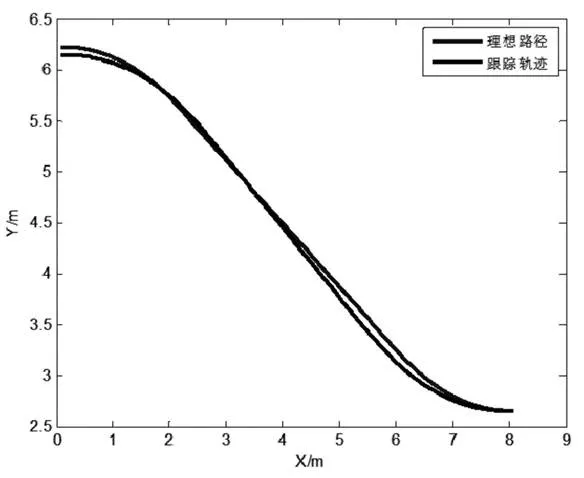
图6 Carsim与Matlab联合仿真实验结果

图7 模型车方向盘转角变化曲线
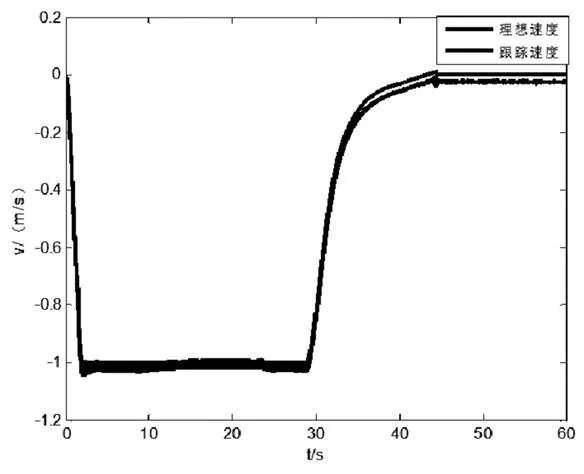
图8 模型车车速跟踪效果曲线
图7、图8、图9分别是联合仿真过程中的模型车方向盘转角变化曲线、车速跟踪效果曲线。数据表明,方向盘转角变化均匀且具有较好的角度维持性,车速跟踪效果良好,结果均验证了本文所设计路径跟踪控制模型的有效性。
5 总结
基于车辆运动学模型和实车参数在Carsim中搭建了试验模型车,联合Matlab搭建了仿真实验平台,设计了路径跟踪控制模型并进行了仿真实验,从联合仿真结果可以看出:通过控制模型的输入、输出变量,可以实现模型车对规划路径的良好跟踪,证明了本文所设计路径跟踪控制模型的有效性。
[1] Vorobieva H, Glaser S, Minoiu-Enache N, et al. Automatic parallel parking in tiny spots: path planning and control[J]. IEEE Transac -tions on Intelligent Transportation Systems,2015,16(1):396-410.
[2] N Ouadah, O Lamine, B Fares. Car-like mobile robot oriented positio -ning by fuzzy controllers[J]. International Journal of Advanced Robotic Systems,2008,5(3):249 -256.
[3] 李逃昌,胡静涛,高雷,刘晓光,白晓平.基于模糊自适应纯追踪模型的农业机械路径跟踪方法[J].农业机械学报, 2013, 01: 205-210.
[4] 江浩斌,沈峥楠,马世典,陈龙.基于信息融合的自动泊车系统车位智能识别[J].机械工程学报,2017,53(22):125-133.
[5] 江浩斌,李臣旭,马世典,丁世宏,张超.智能车辆自动泊车路径跟踪的非光滑控制策略[J].江苏大学学报(自然科学版),2017,38(05): 497-502.
[6] Ma S , Jiang H , Han M , et al. Research on Automatic Parking Syst -ems Based on Parking Scene Recognition[J]. IEEE Access, 2017: 1-1.
[7] 李臣旭.基于车位场景智能识别技术的全自动垂直泊车系统研究[D].江苏大学,2016.
Design of Parking Path Tracking Control Model Based on CarSim and Matlab*
Li Chenxu1, Ma Shidian2, Jiang Shaokang1, Li Renpeng3, Dou Yinyu3
( 1.Jiangsu University, School of Automotive and Traffic Engineering, Jiangsu Zhenjiang 212013;2.Jiangsu University, Automotive Engineering Research Institute, Jiangsu Zhenjiang 212013;3.Jiangsu ZhongHu Smart Mobility Co., Ltd., Jiangsu Zhenjiang 212133 )
In order to solve the problem that the existing automatic parking system has poor path tracking effect. Firstly, the experimental model vehicle is built in CarSim based on the vehicle kinematics model and the real vehicle parameters. And the corresponding input and output variables of the model car are set. Then, the path tracking control model is designed with Matlab. Finally, the joint simulation experiment is carried out. The results proved the effectiveness of the tracking control model designed in this paper.
kinematics model; path tracking control model; joint simulation experiment
U461.99
A
1671-7988(2019)14-47-03
U461.99
A
1671-7988(2019)14-47-03
李臣旭,江苏大学汽车与交通工程学院,硕士,助教,主要从事汽车电控、智能辅助驾驶方面的研究。
国家自然科学基金重点项目(U1564201);江苏高校自然学科研究重大项目(16KJA580001);江苏省产学研前瞻性联合创新项目(BY2012173)资助。
10.16638/j.cnki.1671-7988.2019.14.015
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年7期)2022-04-20
军民两用技术与产品(2020年3期)2020-04-07
电子制作(2019年15期)2019-08-27
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中国建筑金属结构(2018年4期)2018-05-23
冰雪运动(2016年5期)2016-04-16
新高考·高一物理(2016年1期)2016-03-05
科技资讯(2012年28期)2012-07-09
