
一种基于JPDA算法的多目标数据互联方法研究
2019-08-06 13:48杨佳义
无线互联科技 2019年10期
关键词:波门
杨佳义

摘 要:文章研究了目标跟踪时常出现的航迹相交情况下的波门内数据互联。由于传统数据互联采取最近邻算法,常常导致滤波发散、跟踪丢失等严重情况出现。因此,文章针对此种现象,防止因数据互联错误而导致的严重错误,提出一种避免数据互联出现严重错误的最优算法—JPDA算法。此种算法考虑了波门内所有回波的所有可能的来源情况,是一种最优算法,具有很好的实际意义。
关键词:JPDA算法;多目标跟踪;波门
1 JPDA算法简介
联合概率数据关联(Joint Probabilistic Data Association,JPDA)算法源于单目标数据互联算法。当多目标情况下,跟踪波门不相交时可以采单目标数据互联算法逐一计算。当波门相交且有点迹落入波门相交区域时,此时问题很复杂,需要考虑多种可能的情况。
2 JPDA算法模型
确认矩阵的引入,确认矩阵的作用是表示有效回波和各跟踪门之间的关系。
wjT表示量测J落入目标T的跟踪,1为落入,0为没有落入。
当有回波落入相关波门的相交区域内时,通过确认矩阵的拆分得到所有互联事件的互联矩阵,计算得到互联概率,再用互联概率得到状态协方差和状态更新值。
对于确认矩阵的拆分可以使用以下方式。
(1)每个量测只能有一个源,即量测不是来源于目标就是来源于杂波和虚警。
(2)每个量测最多与一个目标源进行匹配。
因此,确认矩阵必须满足除第一当目标j位于跟踪门t内时,Wjt=1,否则为0。特别的,当t=0时,表示跟踪门内没有目标存在。确认矩阵Wjt=0,表示全部量测都来源于杂波或虚警。
除第一列以外(每个量测均有可能来自于杂波),每行每列有且仅有一个不为0的分量,以此来保证量测来源的唯一性。
3 算法流程
由于JPDA法是基于相位检测自动对焦(Phase Detection Auto Focus,PDAF)推广来的方法,因此,根据单目標PDAF算法可以推出JPDA算法。对于目标状态更新值,要得到目标状态值之前必须计算量测与目标之间的互联概率。
式(3)表示某目标所有互联概率之和为1,即所有量测均为杂波或存在某量测与预测值互联。
θik取值为1,0,该值表示在事件i中量测数据j来自于目标t的判断。若来源于目标,则为1,来源非目标t,则为0。
当求得确认矩阵后,还需知道联合事件概率,该概率反映了在k时刻接收到n个量测的条件下,某一量测与该目标的互联概率。先引入描述互联事件的两个变量。
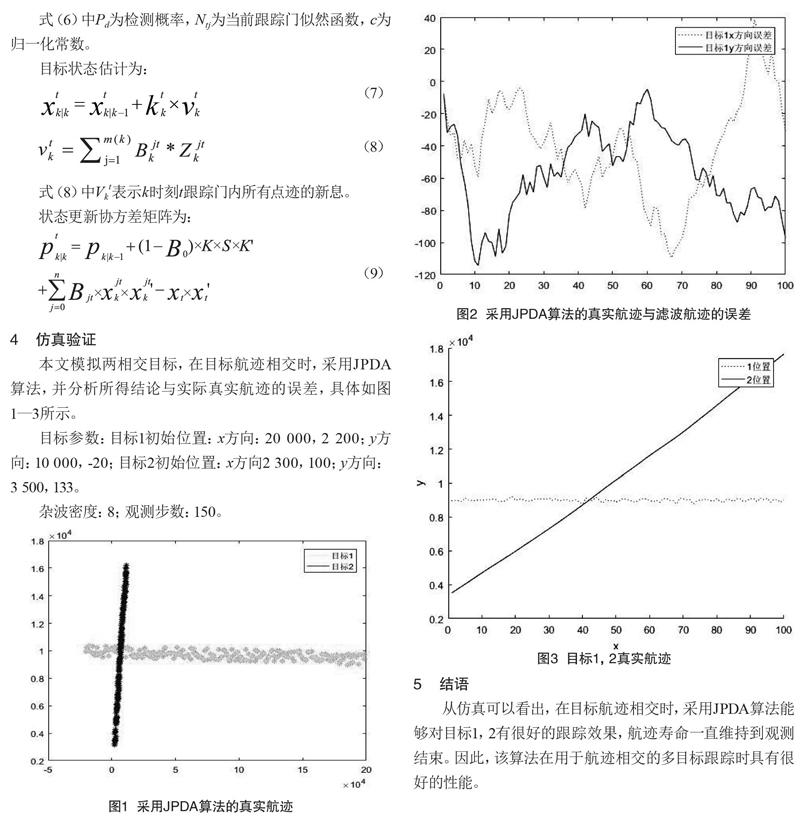
4 仿真验证
本文模拟两相交目标,在目标航迹相交时,采用JPDA算法,并分析所得结论与实际真实航迹的误差,具体如图1—3所示。
目标参数:目标1初始位置:x方向:20 000,2 200;y方向:10 000,-20;目标2初始位置:x方向2 300,100;y方向:3 500,133。
杂波密度:8;观测步数:150。
5 结语
从仿真可以看出,在目标航迹相交时,采用JPDA算法能够对目标1,2有很好的跟踪效果,航迹寿命一直维持到观测结束。因此,该算法在用于航迹相交的多目标跟踪时具有很好的性能。
猜你喜欢
电光与控制(2023年2期)2023-03-11
兵器装备工程学报(2022年7期)2022-08-10
科学与信息化(2021年5期)2021-03-19
激光技术(2021年2期)2021-03-08
激光与红外(2021年1期)2021-02-07
无线电工程(2020年11期)2020-10-28
计算机应用与软件(2020年8期)2020-09-02
上海航天(2017年3期)2017-07-07
现代雷达(2016年3期)2016-12-20
电子设计工程(2015年9期)2015-01-29
