用于驱动液压缸活塞运动轨迹跟踪的二阶滑模控制
2019-08-06 11:21赵春红张洛平
中国工程机械学报 2019年4期
赵春红,张洛平
(1.山西职业技术学院 机械工程系,太原 030006; 2.河南科技大学 机电工程学院,河南 洛阳 471023)
伴随挖掘机的快速发展,其功率也在逐渐增大,挖掘机液压驱动系统也在向着高压方向发展.传统的挖掘机大多采用机械式杠杆手动操作进行液压驱动换向,长时间工作容易产生疲劳.电液阀结合了电子和液压技术各自优点,使挖掘机手动控制进入电液控制阶段[1].挖掘机在执行高精度任务时,若定位不准确,就会造成巨大经济损失.我国对挖掘机电液阀控制研究与国外相比差距还很大,因此,研究挖掘机电液阀驱动控制,对于提高挖掘机整体水平具有重要意义.
为了提高挖掘机电液阀驱动控制精度,很多学者对液压挖掘机控制系统展开研究.文献[2-3]研究了挖掘机变量泵液压模糊PI控制方法,建立阀控非对称液压缸运动位移方程式,设计挖掘机不同动作执行机构的PI控制参数,通过实验验证模糊PI控制特性,从而提高了电控泵响应速度.文献[4-5]研究了挖掘机液压驱动节能控制方法,给出了变量泵节能控制系统结构,根据模糊控制规则,设计了模糊神经网络控制方法,通过仿真验证模糊神经网络控制的有效性,具有很好的节能效果.文献[6-7]研究了挖掘机液压驱动模糊PID控制方法,建立液压多路阀模型,通过Matlab软件验证模糊PID控制效果,缩短上升时间和稳定时间,从而提高了系统输出的稳定性.以往研究的挖掘机液压控制系统在受到环境中的波形干扰时,活塞不能很好地按照预定轨迹运动.对此,本文采用二阶滑模控制系统,采用压力反馈对流量增益进行补偿,借助Matlab软件对跟踪轨迹进行仿真验证,并且与传统PID控制方法进行对比分析,为提高挖掘机电液阀控制精度提供参考价值.
1 液压缸驱动模型
本文采用的液压缸驱动装置如图1所示.

图1 电液阀缸驱动示意图Fig.1 Driving schematic diagram of electro-hydraulic cylinder
活塞位置运动方程式[8]为
(1)
式中:xP为活塞位置;Meq为等效负载质量;PA,PB分别为A腔和B腔压力;AA,AB分别为活塞A侧面积和B侧面积;Bv为粘性阻尼系数;Fad为负载压力;βe为体积模量;VA,VB分别为A腔和B腔的体积;QA,QB分别为A口和B口的流量;CL为泄漏系数;KvA,KvB分别为阀口A和阀口B的流量增益;xv为阀芯位置;ωv为液压固有频率;ξv为压力损失系数;uv阀门输入信号;PS,PT分别为供应压力和油缸压力.
负载压力方程式为
(7)
式中:PL为气缸负载压力;λ为流量增益比;ρ为体积比;μ为面积比.
假设阀泄露流量忽略不计,则可以推导液压空间模型方程式为
(8)
(9)
(10)
(11)
式中:KQ为流量增益.
由于负载和供应压力的变化,导致阀流量增益KQ的变化.因此,采用压力反馈对流量增益进行补偿,其方程式为
(12)
AAuv1=KQ1uv
(13)
假设KQ≈KQ1,将式(13)代人式(8),可得
(14)
液压驱动通常阻尼较低,采用补偿器进一步降低了阻尼.为了简化,采用压力反馈定律uv1=uc1-kLPL.假设可以忽略非线性摩擦项,并将所讨论的补偿器应用到模型中,可以得到线性化模型传递函数[9]为
(15)
(16)
(17)
ξs=MeqAAkL(μ2+ρ1)βe+Bvρ1VA1·
(18)
式中:uv1为阀口输入信号;uc1为阀口输出信号;XP为活塞输出位移;UC为输出电压;Ks为反馈量;Ts为假设的参数.
从式(17)和式(18)可以发现,压力反馈项可以改善系统的阻尼,而当BvkL项很小时,只会对固有频率产生有限的影响.但是,从式(16)可以看出,压力补偿器降低了系统的增益.引入补偿,并假设系统时间常数足够小,阻尼足够大,则在系统固有频率以下的某个频率范围内,系统可以用给定的积分系统来近似,即
(19)
2 二阶滑模控制器设计
2.1 二阶控制器
控制目标是尽可能跟踪给定参考位置,需要使e=xP-xR=0.利用式(19),闭环系统可以表示为
(20)
(21)
选择合适的参数组成二阶滑模控制器[10],即
(22)
式中:α,β为控制增益系数.
为了分析该控制器的性能,考虑封闭系统的时间导数为
(23)
式(22)的分析是考虑有限时间收敛特性的,这一结果在稳定性分析中是有用的.
2.2 收敛条件
将闭环控制系统e=(e,e′)=(e1,e2)组成向量的方程式为
(24)
如果每个分量f1,f2是齐次的,则满足以下关系式:
(25)
式中:ε为转速迟缓率.
在特殊情况下κ=-1,控制器为线性的,权重系数设置为r1=δ+1,r2=δ,并且控制器指数表示为
(26)
式中:δ为转速不均匀度.
当e1=e2=0时,控制系统在有限时间内渐近稳定.因此,e1=e2=0是控制系统稳定性收敛的条件.
2.3 稳定性分析
通过对滑模面的考虑,可以得到(e,e′)=(0,0)的稳定性.用恒等式e″=(de′)/(de)e′,求得滑模面内解的梯度,简化后其方程式[11]为
(27)
分离变量进行积分得到
(28)
求解后得到
(29)
对于e″=0,根据式(23)和式(26)可得
(30)
将式(29)代人式(30)变换后,可以得到
(31)
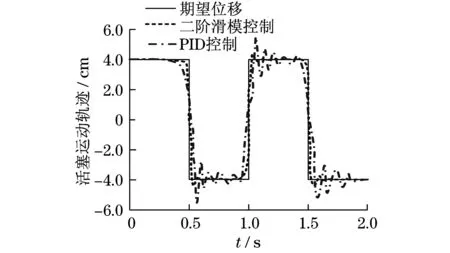
当满足ep2 (32) 因此,二阶滑模控制系统是稳定的. 挖掘机液压缸驱动跟踪轨迹采用二阶滑模控制器,通过Matlab软件对梯形波和方波轨迹跟踪效果进行仿真验证.仿真参数如表1所示. 在无外界波形干扰条件下,对梯形波、方波跟踪效果分别如图2和图3所示.在有外界波形(y=4cos(2πt))干扰条件下,对梯形波、方波跟踪效果分别如图4和图5所示. 图2 梯形波轨迹跟踪(无干扰)Fig.2 Trajectory tracking of trapezoidal waves (no interference) 由图2和图3可知:在无外界波形干扰条件下,采用PID控制和二阶滑模控制液压驱动活塞运动轨迹,跟踪效果较好.由图4和图5可知:在有外界波形干扰条件下,采用PID控制液压驱动活塞运动轨迹,偏离期望位移较大,跟踪误差较大;采用二阶滑模控制液压驱动活塞运动轨迹,偏离期望轨迹较小,跟踪误差较小.因此,二阶滑模控制能够抑制外界环境中的波形干扰,提高活塞运动轨迹跟踪精度,使挖掘机臂定位更加精确. 图3 方波轨迹跟踪(无干扰)Fig.3 Square wave trajectory tracking (no interference) 图4 梯形波轨迹跟踪(有干扰)Fig.4 Trajectory tracking of trapezoidal waves (with interference) 图5 方波轨迹跟踪(有干扰)Fig.5 Square wave trajectory tracking (with interference) 本文研究电磁阀缸液压驱动控制,将电磁阀缸用于驱动挖掘机臂,采用二阶滑模控制活塞运动轨迹,主要结论如下: (1) 二阶滑模控制系统能够根据压力反馈进行在线补偿,具有很好的收敛性,输出更加稳定. (2) 挖掘机臂液压缸采用二阶模糊控制方法,控制系统反应速度快,其活塞运动轨迹产生误差较小. (3) 二阶滑模控制方法能够抑制外界波形的干扰,自适应调节负载压力的变化,适合挖掘机高精度定位要求的场合.3 仿真与分析
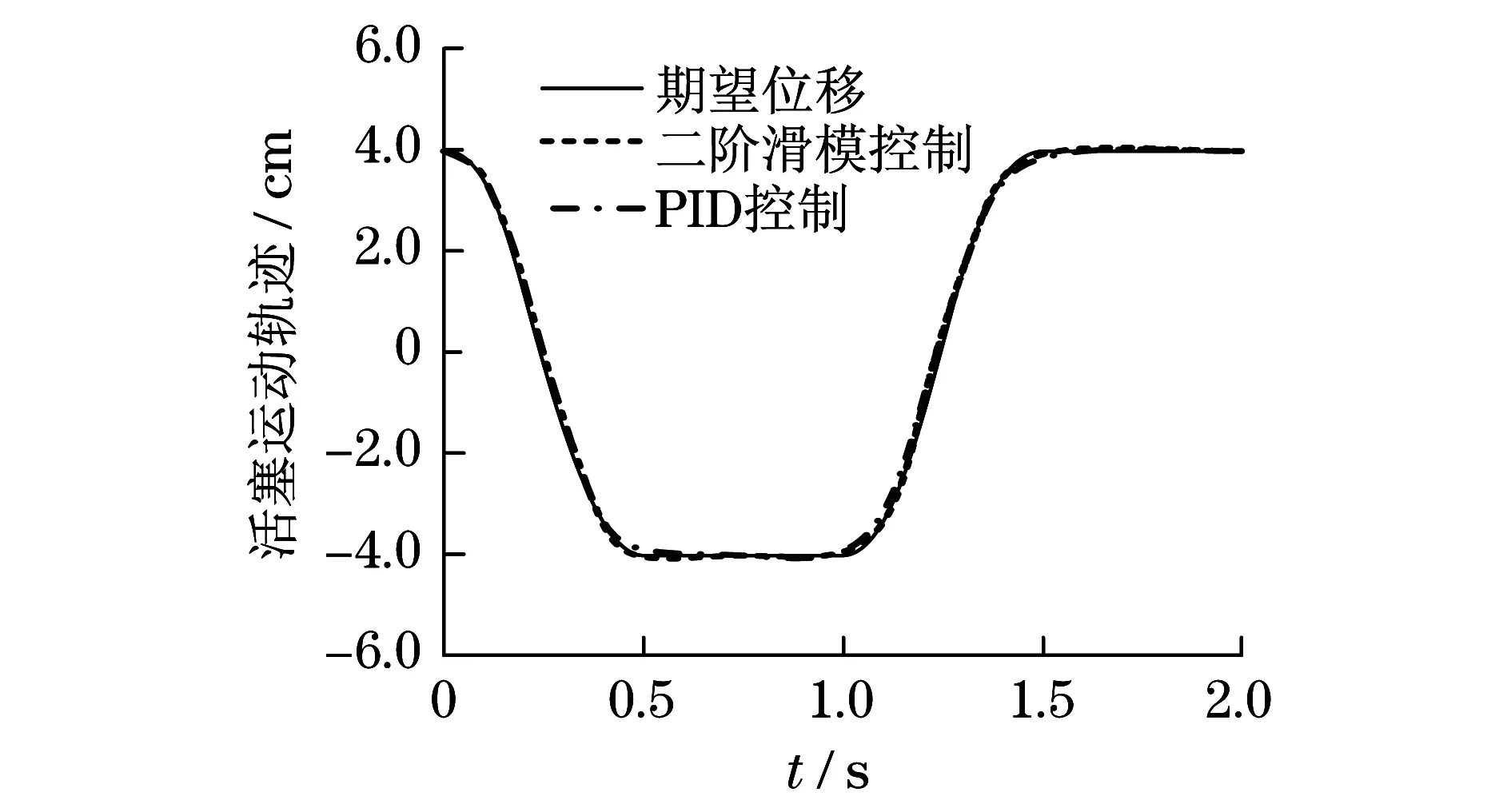
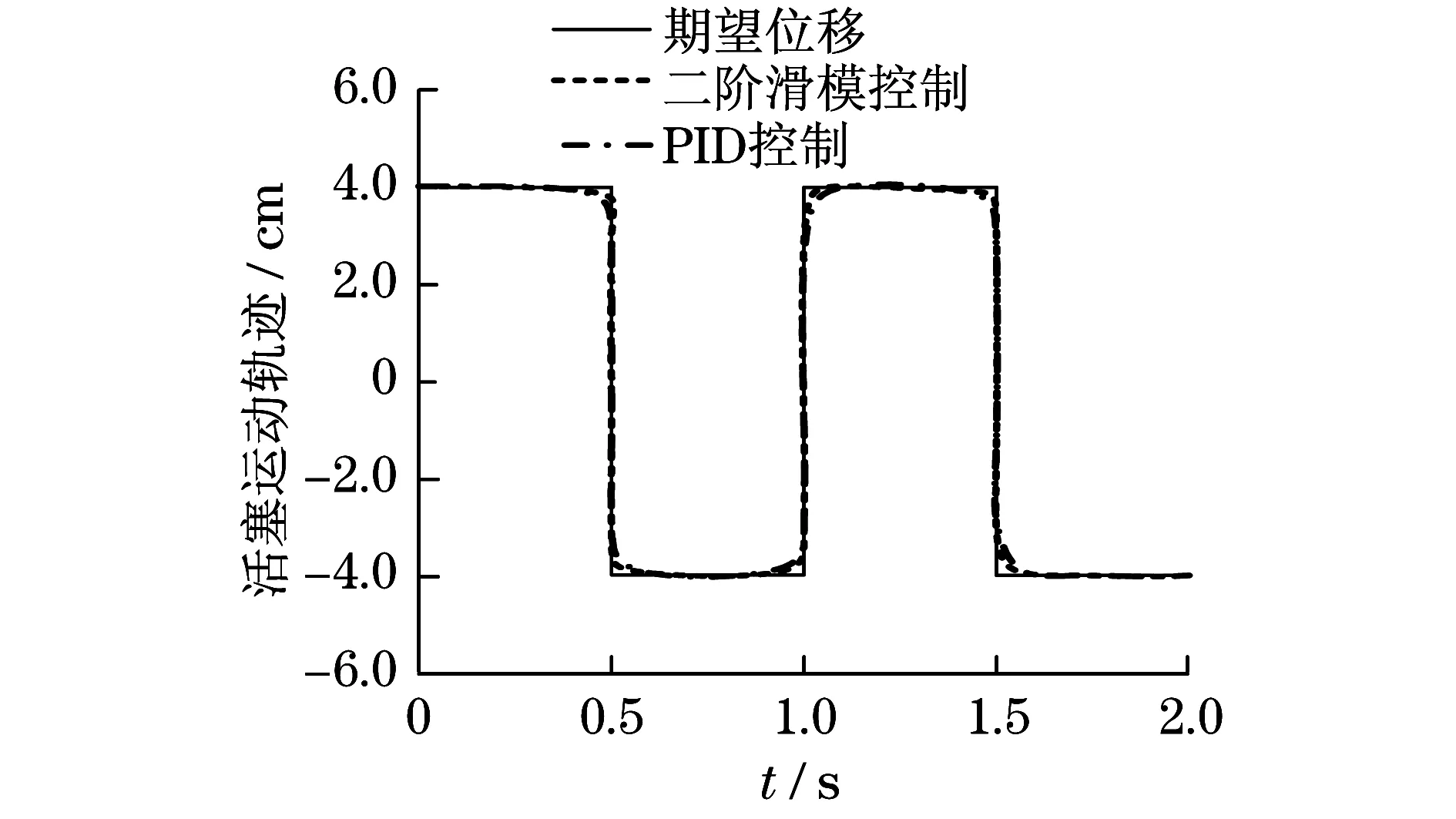

4 结语
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
中等数学(2021年9期)2021-11-22
化工管理(2021年7期)2021-05-13
装备制造技术(2020年4期)2020-12-25
装备制造技术(2020年3期)2020-12-25
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
专用汽车(2016年4期)2016-03-01
有色金属设计(2015年2期)2015-02-28
湖南师范大学学报·自然科学版(2014年3期)2014-10-24