基于非线性PID控制的挖掘机液压系统稳定性研究
2019-08-06 11:21:10罗娜娜
中国工程机械学报 2019年4期
罗娜娜,李 广
(1.吉林工业职业技术学院 基础部,吉林 吉林 132000; 2.天津科技大学 机械工程学院,天津 300222)
挖掘机液压系统主要包括液压缸、液压泵、液压马达、控制阀及油管等[1].液压驱动以油作为能量介质,通过液压泵把机械能转换为压力能,完成各种驱动动作[2-3].伴随电液技术的迅速发展,挖掘机的控制方法也在不断改进,逐渐走向了智能化发展道路.挖掘机在液压驱动过程中,若速度控制不稳定,不仅造成燃油消耗过大,而且导致挖掘机发生严重抖动.因此,研究挖掘机液压驱动控制系统,对于提高挖掘机的市场竞争力具有促进作用.
为了提高挖掘机液压控制的稳定性,研究者对挖掘机液压控制技术进行广泛研究.文献[4]研究了挖掘机BP神经网络PID控制方法,构建BP神经网络模型,对传统PID控制方法进行改进,设计了BP神经网络PID控制流程,通过仿真模型验证挖掘机BP神经网络PID控制效果,提高了挖掘机液压驱动控制精度.文献[5-6]研究了液压挖掘机模糊PID控制方法,创建铲斗液压系统模型简图,对传统PID控制进行改进,设计模糊PID控制流程并进行仿真,液压系统采用模糊PID控制不仅响应速度快,而且跟踪精度较高.文献[7-8]研究了液压挖掘机转速的PID控制方法,分析了挖掘机电机转速要求,通过负载识别参数进行在线修正电机输出转速,设计单神经元PID控制流程,通过仿真验证单神经元PID控制效果,结果表明:单神经元PID控制器调节速度响应快,控制精度较高.但是,以往研究的液压挖掘机受到负载突变干扰时,其活塞速度变化较大,不能很好地满足液压驱动工作需要.对此,本文建立了挖掘机液压驱动简图模型,推导出活塞运动方程式.采用非线性PID控制方法,设计挖掘机液压驱动控制系统.在无负载突变和有负载突变干扰情形下,分别对挖掘机PID控制和非线性PID控制方法进行仿真,为深入研究挖掘机液压控制系统的稳定性提供了理论依据.
1 液压系统数学模型
本文采用液压驱动挖掘机臂运动,其结构如图1所示.
液压驱动工作原理如下:该液压系统在工作时,开启电动机的电源,电动机旋转并带动液压泵工作,液压泵将油箱中的液压油抽吸出来,并在单向节流阀Qs的作用下将液压油输送至2位2通电磁阀进油口P位置处,此时电磁阀出油口A处打开(电池阀左侧通电),则液压油从A处进入液压缸的无杆腔内,无杆腔内充满液压油后将液压杆向
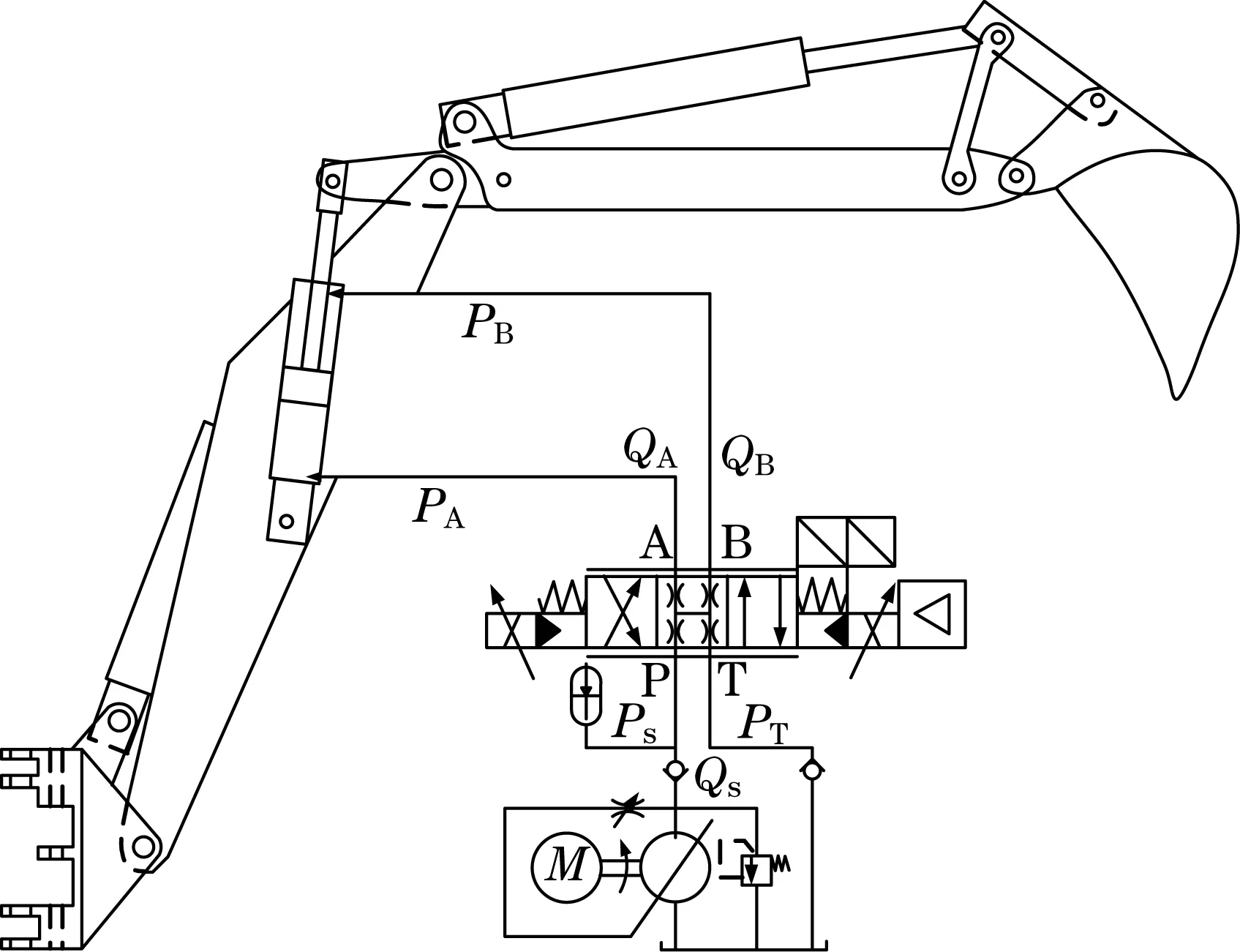
图1 挖掘机液压驱动结构Fig.1 Hydraulic driving structure of excavator
前推进,则带动与其相连的结构做顺时针运动;当电磁阀出油口A处关闭(电池阀左侧断电),而B处打开(电池阀右侧通电),则液压油从P到B处并进入液压缸的有杆腔内;待有杆腔内充满液压油后,则将出油口A处再打开;无杆腔内的液压油经过A到T处并经过PT口流出,再经过单向节流阀重新回到油箱中.非对称液压缸驱动结构如图2所示.

图2 非对称液压缸驱动结构Fig.2 Driving structure of asymmetric hydraulic cylinder
在图2中:u(t)表示比例阀控制信号;Ps表示油源压力;FL表示负载;xv(t)表示比例阀阀芯位移;xp(t)为液压缸活塞位移;x(t)表示负载位移;v(t)表示活塞运动速度;K表示系统弹簧系数.
xv(t)与xp(t)满足以下关系式[9]:
(1)
式中:Kqs为流量增益系数;Kcs为压力系数;A1为无杆腔活塞面积;Cps,Css为等效油液泄露系数;β为油液弹性模量;M为活塞和负载质量;Vt1为液压缸进油腔等效容积.
负载位移与活塞位移存在以下关系:
(2)
对式(2)求导,可以得到负载速度为
(3)
2 液压系统控制
2.1 PID控制
PID控制由比例单元P、积分单元I和微分单元D组成,其控制原理如图3所示.

图3 PID控制流程Fig.3 PID control flow
PID控制的误差方程式为
(4)
式中:r(t)为理论输入值;y(t)为实际输出值.
将误差e(t)进行比例、积分和微分调节后进行相加,得到PID控制器的输出量,从而实现执行器的在线控制.PID控制方程式[10]为
(5)
式中:Kp为比例系数;Ki为积分系数;Kd为微分系数.
2.2 非线性PID控制
传统PID控制输出控制量u(t)受到误差e(t)、比例系数、积分系数和微分系数线性组合的影响.r(t)一般是不可微的,而且是不连续,输出控制结果y(t)又受到外界噪声环境的影响.因此,偏差信号也就不可微,其微分控制信号很难被采集.为了克服以上缺点,采用非线性PID控制方法替代传统PID控制.采用非线性PID控制的液压系统结构如图4所示.
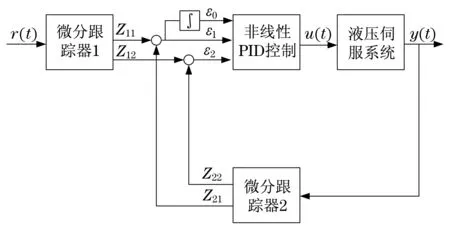
图4 液压非线性PID控制系统Fig.4 Hydraulic nonlinear PID control system
液压控制系统的变量方程式为
式中:ε0,ε1,ε2为误差;Z11,Z12为输入信号;Z21,Z22为反馈信号.
采用非线性组对传统PID控制误差、微分和积分进行处理,产生控制量u(t).传统PID控制器的输入信号采用的是输入和输出误差,非线性PID控制采用非线性对输入和输出信号进行处理后,得到新的误差、微分和积分.
非线性PID控制方程式[11]为
(9)
式中:β0,β1,β2为增益系数;α0,α1,α2为[0,1]之间的实数;δ为积分参数.
3 仿真与分析
为了比较传统PID控制和非线性PID控制效果,采用Matlab软件对液压伺服系统速度响应进行仿真,仿真参数设置如下:A1=0.08 m2,Kqs= 1.32 m2/s,Kcs=3.22×10-9m5/(N·s),M=13 000 kg,β=1.0×109Pa,α=0.8,δ=5,β0=9.5,β1=40,β2=1.2.液压缸活塞参考运动速度为v=0.2cos(πt) m/s.在无负载条件下,液压缸活塞速度响应曲线仿真结果如图5所示.
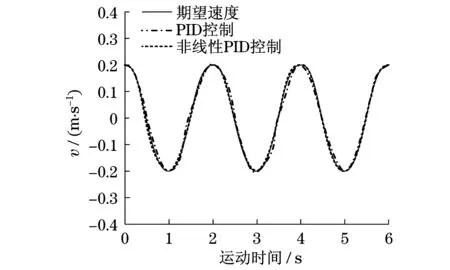
图5 活塞速度响应曲线(无负载干扰)Fig.5 Piston velocity response curve (no load disturbance)
根据图5可知:在无负载干扰条件下,采用传统PID控制和非线性PID控制方法,都能实现液压缸活塞速度响应的跟踪.
在有负载条件下(负载质量为100 kg),液压缸活塞速度响应曲线仿真结果如图6所示.
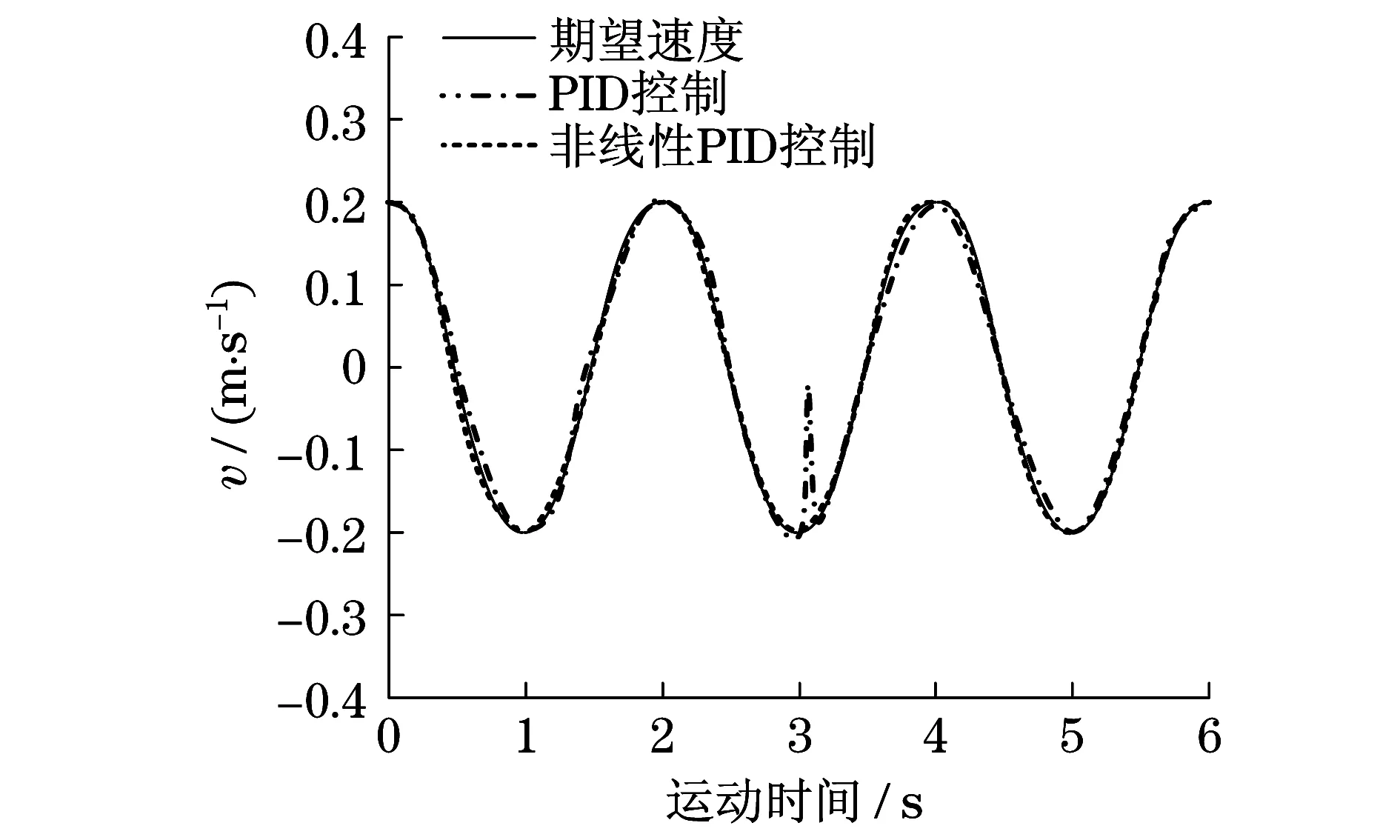
图6 活塞速度响应曲线(有负载干扰)Fig.6 Piston velocity response curve (with load disturbance)
根据图6可知:在有负载干扰条件下,在第3 s突然施加负载,传统PID控制速度就会发生大幅度抖动现象,速度从0.2 m/s降低到0.025 m/s,而非线性PID控制速度基本保持不变,没有发生突变情况.因此,采用非线性PID控制能够抑制突然施加负载的干扰,保持液压驱动系统运动的稳定性.
4 结论
针对挖掘机液压驱动响应速度不稳定问题,设计了非线性PID控制方法,主要结论如下:
(1) 采用传统PID控制方法,挖掘机液压驱动系统活塞运动不稳定,容易受到负载干扰的影响,抖动幅度较大.
(2) 采用非线性PID控制方法,能够在线自适应调节控制器参数,抑制突然施加负载的干扰,液压缸活塞运动相对稳定.
(3) 采用Matlab软件对非线性PID控制进行仿真,可以得到活塞速度响应曲线,能够及时改进不合理之处,从而提高设计效率.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:36
数学物理学报(2021年2期)2021-06-09 08:54:26
石油商技(2021年1期)2021-03-29 02:36:20
装备制造技术(2020年4期)2020-12-25 05:26:14
数学物理学报(2019年5期)2019-11-29 07:46:34
广东技术师范大学学报(2016年5期)2016-08-22 09:07:22
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19 06:55:30
有色金属设计(2015年2期)2015-02-28 21:08:56
中国修船(2014年5期)2014-12-18 09:03:06
筑路机械与施工机械化(2014年10期)2014-03-01 03:02:09