
车队行车LED信号器设计
2019-08-01 03:44王春刚陆军军事交通学院天津300161
物流科技 2019年7期
王春刚,洪 梅,张 艳 (陆军军事交通学院,天津 300161)
WANG Chungang,HONG Mei,ZHANG Yan (Army Military Transportation University,Tianjin 300161,China)
随着新军事变革的不断深入发展,部队面临着新的形势和任务,为提高部队信息化条件下的作战能力和后勤保障力,部队必须具有强大的机动能力。同时,各部队在实施各种形式的大规模演练时,也都以车队行车作为基本内容。部队在车队行车过程中,由于自身的特点与要求,以及受道路交通状况影响等问题,容易造成跟车距离过大、行军长径过长、指挥通信不便,制约了摩托化行军速度的提高,也加大了驾驶员的紧张程度,造成体力脑力的损耗。造成此种状况的重要原因之一就是车队行车的波动效应,前车的信息不能及时被后车驾驶员感知,造成驾驶操作的制约性、延迟性。针对此种情况,可以利用现有技术,设计制造LED信号器,并加装于前车尾部,通过一定的技术手段将前车运行状态直接反映给后车,以便后车及时做出相应的驾驶操作。从而提高部队车队行车的速度,增强安全性。
1 车队行车基本特征及存在问题
1.1 车队行车的特点
车队行车是在道路上行驶的一队有组织、高密度、车间距不大的汽车流,车流中除了前车以外,任何一辆车的速度均受到前车速度的制约,驾驶员须根据前车行驶状态采用相应的车速。摩托化行军中的车辆属于非自由行驶状态,在这种状态下车流具有如下特点:
(1) 受控性
部队摩托化行军,本身是一种军事行动,整个车队统一行动,其运行速度、运行序列、车辆间距、停驶路段、停驶时间、宿营地点等都受到严格的控制。相对于出行目的不一、车型混杂、承运物资多样的地方交通流,摩托化行军的车队具有相对稳定性。战时在敌情威胁,道路破坏等特殊或突发情况下,会受到更多的限制,从而需要更加缜密的组织管理。
(2) 制约性
在整个车队中,后车按特定的要求,保持一定的安全距离跟随前车行驶。为保持整个车队的安全有序,一是后车的车速不会长时间的大于前车的车速,否则就违反机动规则超越了前车;也不能长时间小于前车的车速,否则就会逐渐远离前车,不能保持行军梯队的完整,而且还会对后车造成影响。为了保持行军队形,要求后车要紧紧跟随,不能太近,也不能太远。从军事要求来讲,在行军队列中,后车不能超越前车,后车跟驰速度和距离直接受到前车制约。
(3) 延迟性
当前车改变运行状态后,后车的运行状态将随之发生改变。但是,前、后车运行状态的改变并不是同步的,这是由于驾驶员对前车运行状态的改变有一个反应过程,从而造成一定的延迟,这就是延迟性。整个车队受到延迟性效应,后续车辆受到的影响逐车变化,产生不同的运动状态。后续车辆运行状态的改变依次影响后车,发生传递效应,并且这种传递具有滞后性,越到后面受到延迟性作用越小。
1.2 车队行车时车辆跟车存在的问题
(1)驾驶员休息少、易疲劳
驾驶员为保持和前车适当的距离,必须时刻注意前车的变化,但前车运行状态的变化又不是显而易见的,所以驾驶员要时刻警惕,这种情况下,又往往忽略其他安全因素,再加上驾驶环境单调、枯燥,驾驶员很容易疲劳。另一方面,车队行车的行程一般上千公里,甚至几千公里,驾驶员需要连续驾驶几天时间,在这种情况下,还要担负其他训练或防卫任务,不能得到有效的休息,使驾驶员达到疲劳的极限。
(2)行军速度慢、间距大
由于是按队列依次行驶,为保持建制的完整,考虑车队行车对后车的影响,头车的速度不能过快,也不能随意变换车速,这样才能尽量减少对后车的影响,所以造成车队整体行进速度较慢,据历次车队行车演练的统计数据,车队的整体运行速度在高速公路上也只能达到60公里/小时。在行军要求中,一般要求车间距至少应保持在50米以上,但在实际的车队行车中,车间距平均都在100米左右,在道路条件不良或交通控制不力的情况下,车间距平均可达200米左右,造成车间距过大,行军长径过长。
(3) 通信指挥不便
部队摩托化行军时,整个梯队的行军长径可以达到几十公里,在如此狭长的“线式行军”中,再加上通信工具相对较少,造成通信联络不便,很多时候只是用简单的旗语、哨音通信,而且旗语在行驶状态时不便操作,哨音也容易受到环境干扰。同时,在行军中,驾驶员处于驾驶操作状态,车厢内人员和驾驶员之间不便于联络,车与车之间也缺乏沟通的渠道。因此,通信指挥不便也成为提高车队行车能力的制约因素。
2 功能设计
2.1 信号提示功能
信号提示功能设置目的就是让后车在最短时间内了解到前车的运行状况,从而采取最有效的驾驶操作,以最大限度的和前车保持相近的运行速度和加速度,这样就能够保持较高的行军速度和更小的安全车距。同时,LED比白炽灯点亮过程要提前0.2s左右,这样可以为紧急制动赢得0.5s以上的操作时间,相当于增加安全距离10m以上。根据美国的研究报告,如驾驶员比现在早0.5s预知危险,就可减少追尾事故50%,可见这对于提高摩托化行军的安全性具有重要的意义。
在一般的驾驶操作中,驾驶员脚离开加速踏板将移向制动踏板的那一刻,车辆产生一个较大的负加速度信号,这时,前车可显示黄色闪灯,通告紧随其后的车辆必须做好刹车准备,后车驾驶员也松开加速踏板将脚放于制动踏板上,这样,比没有提示至少争取到0.3~0.5秒反应时间,前后车两个驾驶员脚的动作能够更趋于同步。一旦前车刹车,LED变为红色显示,后车驾驶员就几乎可在第一时间与前方车辆驾驶员趋于同时踩下刹车,前方如果是缓刹车,后方也随之缓刹车,前方惯性减速,后方也随之惯性减速。
根据以上基本设想,信号提示功能可以分以下三类[1]:
(1)车辆加速。车辆加速过程从驾驶操作上主要是驾驶员踩下油门,为了提供更准确的信息,可将正加速度的大小分为三个等级,即加速较快、加速中等、加速较慢。对于后车而言,前车车速增加,是一个安全信号,所以采用绿灯显示,根据正加速度大小,信号器分别为全部绿灯闪烁、三分之二绿灯闪烁、三分之一绿灯闪烁,显示车辆加速。
(2)车速保持。车速保持即车辆以某一速度匀速行驶,这个过程油门大小基本不变,没有松开油门、加大油门操作,也没有制动操作,车辆保持动态稳定。
(3)车辆减速。车量减速分为两种情况,第一种情况是油门放松,此条件下又有两种情况,一是油门轻抬,此时,车辆减速不明显;二是完全放开油门,此时,车辆减速稍明显。对于油门放松而言,车辆不明显减速,此时应引起驾驶员注意,所以用黄灯闪烁显示:轻抬油门时,二分之一黄灯闪烁;放于油门时,全部黄灯闪烁。第二种情况是驾驶员踩制动,车辆制动对于后车是危险信号,用红灯闪烁显示。根据制动力,即加速度的大小,区分三个等级,一是轻踩制动,此时用三分之一红灯慢频闪烁显示;二是中度制动,此时用三分之二红灯中频闪烁显示;三是紧急制动,此时用全部红灯高频闪烁显示。
运行过程中,LED屏随时显示车辆运行速度,信号显示方法和涵义见图1。
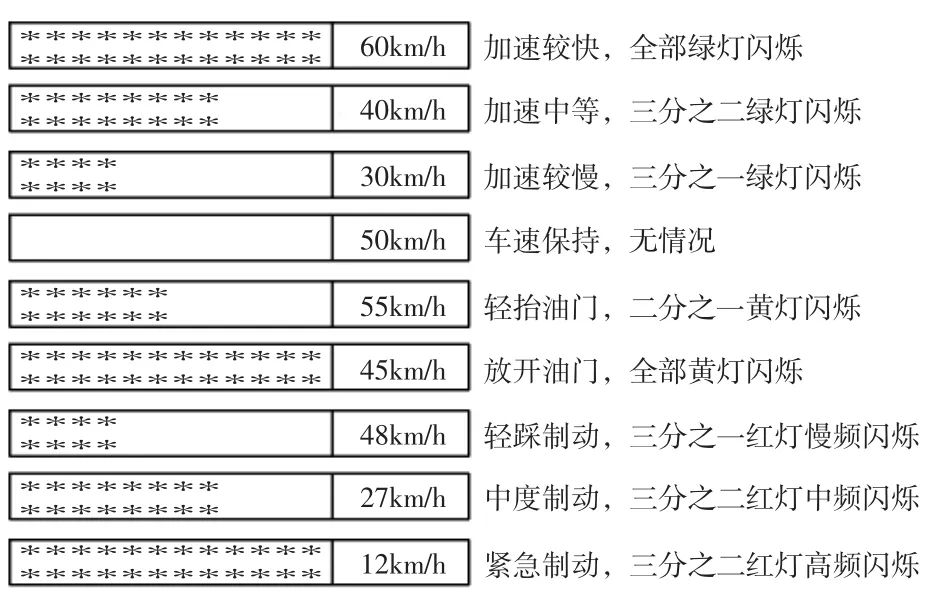
图1 信号显示方法和涵义示意图
2.2 通信指挥功能
车队行车还有一个突出的问题是机动途中不便于通信联络,尤其是车辆较多,行军长径较长时,靠旗语、哨音难于达到通信联络的目的。在行军途中,可能对全队发布的提示或命令主要有车辆故障、加大车距、减小车距、休息、人员集合,以及分队防卫的防空袭、核化生武器袭击防护、车辆疏散隐蔽等。为此,可以将通信联络功能嵌入信号器设计中。通信指挥信号的LED显示屏可以和灯光信号LED合并,其结构及显示效果见图2。
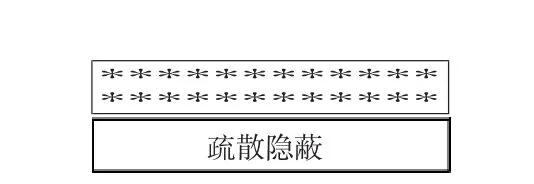
图2 LED整体结构及功能区划分
为便于驾驶员理解掌握和运用,可结合车队行车通信联络功能所需,在驾驶室内安装控制面板,面板的设计如图3所示。当需求项目较多时,控制面板可用数字代替,并设计数字代码和显示信息对照表,便于操作。比如“01”代表“车辆故障”、“02”代表“小休息”。
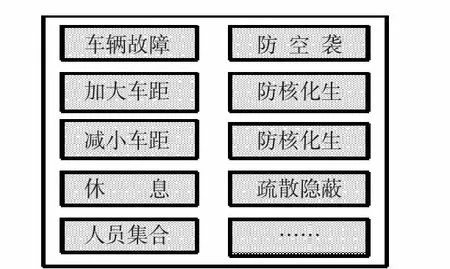
图3 通信指挥控制面板示意图
3 系统组成及功能实现
3.1 总体结构
系统主要由微加速度计感应单元与操作控制单元、微处理器单元、LED驱动单元和LED显示单元四部分组成,见图4。微加速度计用于对车速的感应,并将信号传入微处理单元,操作控制单元用于接收驾驶员在控制面板的操作信息,并将信号传入微处理单元;微处理单元接收传来的信号后传入LED驱动器,接受不同信号后,LED驱动器驱动LED显示预设的信号类别和显示方法。从而将车辆的行驶信号和驾驶员的控制指令转换为可视的信号,用于行军时车辆的控制和通信指挥。

图4 系统总体结构示意图
3.2 微加速度计[2]
微加速度计可采用ADXL202,它是美国ADI公司研制的基于单块集成电路的完善的双轴加速度测量系统,它是由一个多晶硅的表面微机械传感器和一个信号调制电路组成的开环加速度测量结构。对每根轴而言,输出环路将模拟信号转换为数字信号,这些数字信号可直接与微处理器接口,不需A/D转换或附加其它电路。ADXL202可测量正负加速度,其最大测量范围为12g,它既能测量动态加速度,最大可承受1 000g的冲击。因此,ADXL202是一种可行的选择解决方案。
3.3 微处理器
微处理器实际承担两部分功能,一是微加速度计输入的信号,另一部分是处理来自驾驶中驾驶操作的指令。对于第一类信号的处理,可采用P87LPC76X单片机,分析处理输入信号并输出结果。对于第二类信号,其处理要简单的多,可以集成于一个微处理器,也可以直接输入LED驱动器信号。需要特别注意的是,由于驱动器根据信号的强弱来选择显示方案,所以,应注意标定车辆加速度的大小,以区分各个不同的等级,否则可能提供错误的信号。
3.4 LED控制驱动器[3]
近年来,LED的品种不断增加,性能逐年提高,应用领域更为广泛。在大屏幕LED的背光照明、汽车内外照明、公共场所照明、建筑的内外装饰灯照明、城市景点的亮丽工程等方面获得了很大的发展。这也促进了LED控制器的全面发展,目前,已经出现了多种通用LED控制器,其控制驱动器技术已经成熟,能够完全适应车队行车信号器设计功能的要求。
4 总结
本文针对车队行车的特点,从整体上对车队行车车辆信号器进行了构想,提出了系统初步设计的基本总体结构及基本功能。对于利用信号器进行前后车的通信与联络,提高部队机动能力和行军途中的安全性具有重要的理论和实际意义。
猜你喜欢
测试技术学报(2023年2期)2023-04-06
政工学刊(2021年3期)2021-11-25
故事作文·低年级(2018年12期)2018-12-17
新传奇(2018年16期)2018-05-14
湘潮(2018年1期)2018-01-22
湘潮(上半月)(2018年1期)2018-01-16
人民交通(2016年5期)2017-01-05
人民交通(2016年9期)2016-06-01
中学生数理化·高一版(2008年6期)2008-11-15
