核电大型设备吊装及运输智能仿真系统的开发及应用
2019-07-31 06:08
石油化工建设 2019年3期
中核机械工程有限公司 浙江海盐 314300
1 引言
随着国家核电技术的快速发展以及核电站建设规划的逐步落实,核电大型设备的种类更加丰富,模块化程度越来越高,使得吊装及运输难度逐渐升级。核电大型设备吊装及运输施工作业由于影响因素多、责任重大,高风险是其主要特征,需要精心组织方可完成。吊装及运输过程安全质量控制取决于施工方案的可靠性。施工过程必须严格按照施工方案开展,才能确保核电大型设备顺利运输及吊装就位。
编制吊装、运输施工方案是一项系统工程,前者涵盖了施工场地地基处理、吊点布局、吊索具设计、起重吊装设备选型、吊装工艺设计、质量安全保障等;后者涵盖了工装设计、运输车选型、运输路线选取、运输过程控制、质量安全保证等。而传统吊装及运输方案的设计计算和机械设备选型以手工为主,受人为影响大,极易出现偏差;设计方式以二维图呈现,虽然在一定程度上解决了空间预想的问题,但是没有将吊装运输过程可视化,也没有解决整个施工作业实施过程中的三维空间架构的问题。这样编制出的施工方案很难满足可靠、可行的要求。
随着计算机技术以及虚拟现实技术的快速发展,利用计算机技术搭建虚拟场景进行吊装运输仿真,利用计算机速度快的优势提高运输方案编制的效率,同时利用计算机计算结果的唯一性和准确性实现施工作业标准化均已成为可能。目前计算机辅助设计已经能够实现吊装运输过程可视化、智能化,最终将实现核电大型设备吊装及运输方案的自动编制和标准化。
2 系统总体概述
2.1 框架结构
核电大型设备吊装及运输智能仿真系统分为四大功能模块,即数据库模块、虚拟仿真模块、校核计算以及输出模块,其总体框架如图1所示。

图1 核电大型设备吊装及运输智能仿真系统框架图
2.1.1 数据库模块
数据库模块是其他模块工作过程中所需数据的提供者,同时也是虚拟仿真模块所需吊装/运输方案的提供者。
吊装关联数据库具体分为4个部分:起重机外形尺寸数据库、起重机起重性能数据库、起重机部件相对重心数据库及辅助设备数据库。运输关联数据库中仍分为4个部分:运输车外形尺寸数据库、运输车单个模块性能数据库、运输工装数据库、运输车模块重心数据库。数据库模块中提供两个主要的操作:吊装/运输方案的生成和后台数据库的管理。吊装/运输方案生成是根据用户输入的工况要求及一些限制条件,系统自动地搜索起重机性能数据库/运输车性能数据生成一组满足工况要求的吊装/运输方案。后台数据库管理主要负责管理系统中的各种参数。
2.1.2 虚拟仿真模块
虚拟仿真模块负责起重机、运输车、作业环境和吊装/运输设备的三维模型显示以及吊装/运输仿真控制。
作业环境和吊装/运输设备的三维建模与显示有两种方式:一种方式是利用其他商业三维建模软件(如3DSMAX9)建立作业环境或吊装/运输设备模型,并保存为文件,系统通过导入该文件提取其中的三维信息数据送给渲染引擎生成三维吊装/运输作业环境或吊装/运输设备显示在三维虚拟场景中;另一种方式是,自主开发一个二维草绘画板,用户在二维草绘画板绘画二维的作业环境或吊装/运输设备,并补充其三维信息,然后把这些三维信息送给渲染引擎进行三维建模与显示。
吊装/运输设备的三维建模是根据选定的吊装运输方案从外形尺寸数据库中提取出对应的设备外形参数送给渲染引擎生成逼真的三维设备模型。
三维渲染引擎是虚拟仿真模块的核心,其设计与实现也是仿真系统的一个重点和难点。虚拟仿真模块除了提供三维建模和显示功能,还为用户提供人机交互的接口,用户通过人机接口可以控制吊装运输仿真,实现对现实世界中吊装运输作业的模拟。
2.1.3 校核计算模块
校核计算部分包括平衡梁校核计算、索具校核运输工装校核计算。系统的校核计算功能取代了目前手工的校核计算,减少了手工计算的错误,节省校核计算的时间,为用户设计或选择辅助设备提供参考依据。
2.1.4 输出模块
输出模块主要包括以Word文档格式输出校核计算书、起重机/运输车占位和立面AutoCAD图、吊装设备的AutoCAD图,以及其他吊装/运输仿真的结果,如仿真录像等。从而为制定吊装/运输方案提供可靠的素材和依据,指导吊装/运输作业的实施。
2.2 关键技术
2.2.1 三维空间可视化技术
三维空间可视化技术是提升吊装/运输工艺设计手段的重要因素。目前国外已形成多款商业及非商业三维虚拟引擎,例如OGRE是国外某团队开发的开源三维虚拟引擎,可以实现二次开发,能够满足大型设备吊装及运输三维空间可视化的应用要求。
核电大型设备吊装及运输三维空间可视化应用在作业设计时,应满足:
(1)吊装/运输过程可视化。可实现以起重机位姿驱动整个吊装过程的可视化,以运输车动作驱动整个运输过程的可视化,满足核电大型设备从初始位置到设备指定停放位置再到设备就位位置的整个施工过程的可视化。
(2)关键技术和参数实时显示。在吊装/运输作业过程中,除受三维空间因素影响外,还需要考虑起重机和运输车辆负载率是否满足要求。本研究可实现三维空间中起重机和运输车辆额定载荷、实际载荷及负荷率、实时计算和显示,为吊装和运输作业提供最直接的数据参考。
(3)碰撞检测和最小距离计算。在吊装和运输作业过程中运输车辆、大型设备与周围障碍物之间,起重机臂杆与大型设备及周围障碍物之间是否碰撞以及它们之间的最短距离是多少,是方案设计人员始终关注的技术问题。本研究采用基于穿透率的广义/狭义二阶段碰撞检测算法和基于三角形网格的精确距离计算方法,实现碰撞检测和最小距离计算。
2.2.2 通用数据库和模型库的设计
核电大型设备吊装/运输方案编制中需要用到大量的数据,本系统从技术管理的角度研发实现了数据库的设计和模型库的设计,将二维图形、三维模型、数据库通过数据流进行统一:
(1)起重机数据库设计;
(2)运输车数据库设计;
(3)核电大型设备数据库设计,本系统整理并归纳了AP1000、高温气冷堆等堆型的大件被运输设备,设计核电大型设备数据库;
(4)相关二维图形库,为提高图形输出效率,本研究将起重机、运输车、大型设备形成二维图形库,二维图形库与数据库尺寸保持一致,输出时根据吊装/运输方案自动调用进行输出;
(5)相关三维模型库,为实现三维虚拟空间搭建,本研究设计并实现了基于参数化驱动三维空间模型的建立。
2.3 系统功能描述
(1)实现起重机的智能选型;
(2)实现运输车辆的智能选型;
(3)实现核电大型设备的参数化建模;
(4)实现核电大型设备吊装过程、运输过程三维仿真,实现交互式的运动状态控制,并实现状态信息显示及临界报警;
(5)实现吊装仿真过程中接地比压值的实时显示;
(6)实现仿真过程中的实时碰撞检测和最小距离计算;
(7)实现对操作过程的记录和回放;
(8)实现起重机作业工况、计算书、吊装站位图、吊装立面图的输出;
(9)实现运输车辆作业工况、运输站位图、运输立面图的输出;
(10)实现数据的实时更新及统一维护和管理。
3 应用实例
采用过去成功吊装及运输案例来验证系统的有效性和实用价值。择取海阳核电项目中的典型设备CA01的运输和吊装进行模拟为例,CA01结构模块参数见表1。

表1 CA01结构模块参数
CA01模块在CA组装场地完成整体组装工作,组装完毕后由CA组装场地运输至核岛指定区域卸车,并吊装至核岛反应堆厂房内,运输距离为1.3km左右。
3.1 CA01运输
3.1.1 数据输入
首先,输入被运输设备CA01模块的详细参数,包括尺寸、重量、设备重心等参数(图2)。其次,进行运输车辆信息配置,CA01模块采用两排液压平板车组,第1组采用4个基础轴线拼装(图3),额定载荷为840t,平衡配重100t,加固件重10t;第2组采用4个基础轴线拼装(图4),最大净载重为960t,平衡配重为100t,加固件重为10t。
3.1.2 负荷率校核
根据实际运输中CA01模块的重心分布情况,对第一、二组平板车负荷率进行校核。
3.1.2.1 第一组平板车负荷率校核
负荷率=(货物重量×D2/(D1+D2)+平衡配重+加固件重)/额定载荷=(956.11×16491.5/28271+100+10)/840=55.56%
由计算可知,第一组平板车负荷率为55.56%,安全。
3.1.2.2 第二组平板车负荷率校核
负荷率=(货物重量×D1/(D1+D2)+平衡配重+加固件重)/最大净载重=(956.11×11779.5/28271+100+10)/960=63.48%
由计算可知,第二组平板车负荷率为63.48%,安全。

图2 CA01设备参数

图3 第1组运输车数据
3.1.3 运输仿真
从后台数据库中调取CA01设备模型、工装模型、运输车模型、AP1000场景模型,也可由外界建好按比例导入。进入运输仿真界面,设置好初始站位(图5),系统实现运输路径规划(图6),设置运输动作(直行、转弯);设备按照输入的动作进行仿真,最后自动输出仿真视频和运输方案信息(图7)。

图4 第2组平板车数据

图5 运输站位

图6 运输路径规划

图7 输出仿真视频和运输方案信息
3.2 CA01吊装
吊装与运输作业仿真的区别在于配置和动作设置上。
吊装仿真需配置吊索具,本系统为扩大通用性,对吊索具进行了标准和专用(图8)两种分类。

图8 专用吊具选择
对于起重机选型,可手动选择工况,系统自动校核负载率,也可通过设置条件使系统自动筛选出符合条件的工况。起重机动作设置分为起钩、落钩、起重机行走(直行、十字行走)、回转等(图 9、10、11),设置完成后系统在三维环境中完成CA01的吊装,过程中可实时显示吊装工况信息、对地压力、最小净距显示和碰撞检测(图 12、13)。

图9 CA01吊装场景导入

图10 CA01吊装回转
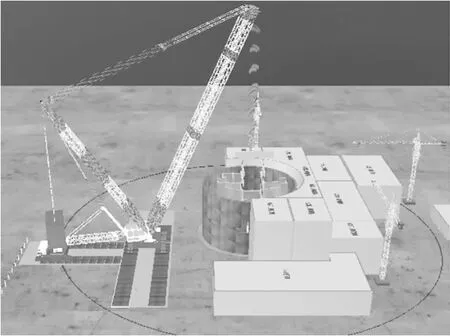
图11 CA01就位
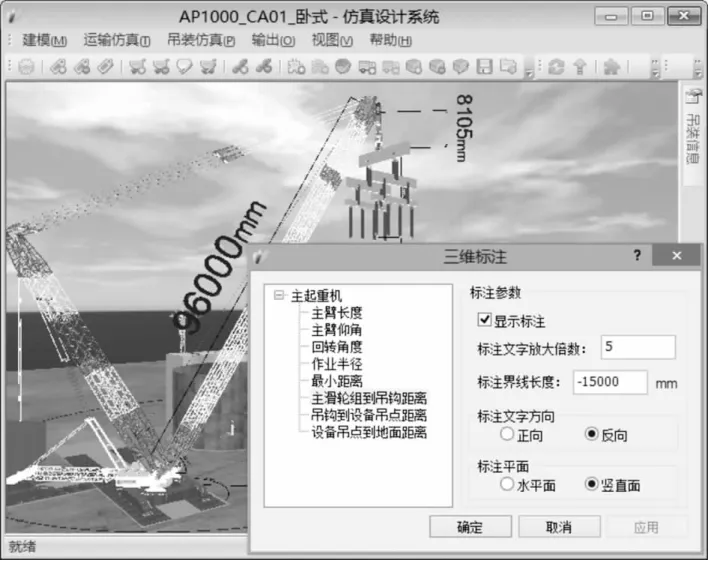
图12 三维实时标注

图13 最小净距显示
经过CA01运输和吊装作业的仿真,系统输出方案与实际方案作业过程一致,计算结果一致,工况相符,经验证可行,具备实际施工指导意义。
4 结论
本系统从吊装及运输方案的编制、三维仿真模拟等方面掌握核心技术,改进原有大件设备吊装及运输方案的平面编制方法,实现设备吊装及运输前三维仿真模拟、吊索具校核计算,方案自动生成、吊装及运输最小净距显示及干涉检测等,从而进一步提高吊装、运输方案的自动化编制水平,实现核电吊装运输方案的可视化展示,实现核电吊装运输一体化,弥补了吊装及运输工程方案信息配置可视化的空白。本系统已开发完成并成功应用于多项核电、石化领域吊装运输施工中。
猜你喜欢
大电机技术(2022年5期)2022-11-17
中国核电(2021年3期)2021-08-13
中国核电(2021年3期)2021-08-13
中国核电(2020年2期)2020-06-24
中国交通信息化(2020年12期)2020-02-06
中国交通信息化(2019年7期)2019-10-08
中国特种设备安全(2019年7期)2019-09-10
船舶标准化工程师(2019年4期)2019-07-24
中国特种设备安全(2018年10期)2018-12-18
中国核电(2017年1期)2017-05-17