六相永磁同步电机驱动控制方式
2019-07-31 09:37:44匡晓霖徐金全黄春蓉李嘉科郭宏
北京航空航天大学学报 2019年7期
匡晓霖,徐金全,黄春蓉,李嘉科,郭宏
(1.北京机械设备研究所,北京100854; 2.北京航空航天大学 自动化科学与电气工程学院,北京100083;3.中国人民解放军驻航天科工集团第二研究院二〇六所军代室,北京100854)
多电/全电化是未来飞机的重要发展方向,其通过简化机载二次能源以提高能源利用率,降低飞机的重量成本。随之,机载多能源作动系统也逐渐被单一电力作动系统替代[1-4]。作为电力作动系统的主要形式之一,机电作动器以其小型化、高效率、高功率密度及良好的动态性能等优点,受到广泛关注[5-7]。
为提高机电作动器的可靠性,其伺服永磁同步 电 机 (Permanent Magnet Synchronous Motor,PMSM)常采用多相结构以保证系统具有容错能力。按照驱动控制方式的不同,多相结构的永磁同步电机系统可分为余度永磁同步电机系统和容错永磁同步电机系统2类[8-11]。余度永磁同步电机系统是基于传统三相永磁同步电机系统提出的,其定子绕组由多套三相绕组按照一定的空间结构排列构成,采用三相桥逆变器驱动方式,控制策略简单[12-15]。若某相绕组发生故障,则退出故障所在的整套三相绕组,故障前后电机均保持对称运行。容错永磁同步电机系统以每相绕组为基本单元,采用H桥逆变器驱动方式,发生故障时仅需退出故障相,故障后电机系统不再保持对称运行[16-18]。与余度永磁同步电机系统相比,相同相数的容错永磁同步电机系统具有更高的容错能力和绕组利用率,但同时也带来了驱动控制器体积质量更大、控制策略更复杂的问题。目前,对于2种多相永磁同步电机系统运行性能差异的研究较少,局限在起动性能、输出转矩、不平衡磁拉力等方面,而且采用了完全不同的电机系统[19-20]。不同驱动控制方式对多相永磁同步电机运行性能的影响尚不明晰,有必要开展进一步的研究工作。
本文基于一个六相永磁同步电机,分别构建成双三相余度永磁同步电机和六相容错永磁同步电机2种电机驱动控制系统。在此基础上,通过仿真分析和实验研究了不同驱动控制方式对六相永磁同步电机调速范围和动态性能的影响机理及影响规律。
1 六相永磁同步电机系统模型
1.1 电机数学模型
本文所研究的六相永磁同步电机为12槽10极结构,如图1所示。其六相绕组分别为A、B、C、D、E、F,各相绕组依次相差60°机械角度排列。为简化分析过程,对电机作如下假设:
1)定转子产生的气隙磁场均按正弦分布,忽略各次谐波。
2)忽略铁心磁饱和及磁滞、涡流的影响。
3)定子六相绕组对称,转子对直轴和交轴对称。
4)忽略绕组互感的影响。

图1 六相永磁同步电机定转子结构Fig.1 Stator and rotor structure of six-phase PMSM
根据上述假设条件,利用电路和电磁感应原理可以得到电机定子绕组的电压方程和磁链方程分别为

式中:
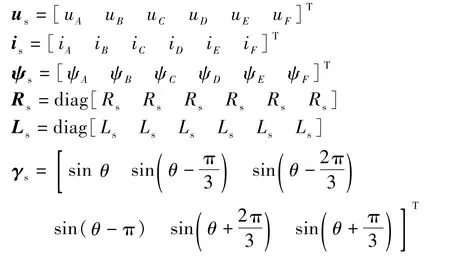
其中:us、is和 ψs分别为六相绕组的相电压、相电流和相磁链矩阵;Rs和Ls分别为六相绕组的电阻和电感系数矩阵;ψf为电机转子永磁体磁链幅值;γs为磁链系数矩阵;θ为电机转子磁极位置和A相绕组轴线之间的电角度差。
由磁共能对机械角度求偏导可以得到电机的电磁转矩为

式中:θm为电机转子磁极位置和A相绕组轴线之间的机械角度差。
由于永磁同步电机为隐极电机,气隙均匀分布,其相绕组电感不随机械角度变化,则电机电磁转矩表达式可以改写为

六相永磁同步电机的运动方程为

式中:Ω为角速度;J为转动惯量;B为阻尼系数;TL为负载转矩。
1.2 余度永磁同步电机系统模型
分别将六相永磁同步电机的A、C、E和B、D、F三相绕组的接出端相连成中性点,可构成2套三相对称绕组,2套三相绕组的相位相差60°机械角度。驱动部分采用2套三相桥逆变器即构成双三相余度永磁同步电机系统,结构如图2所示。
双三相余度永磁同步电机系统可视为共用相同转子的2个三相永磁同步电机子系统,定义为余度1和余度2。由于忽略了电机相间互感,2个三相永磁同步电机之间不存在电磁耦合,因此,可以采用传统的三相永磁同步电机坐标变换方法,将2个三相永磁同步电机分别由三相静止坐标系(A-B-C坐标系)变换至两相旋转坐标系(d-q坐标系),在d-q坐标系下实现对2个三相永磁同步电机的矢量控制。
将六相永磁同步电机的电压和磁链方程变换到d-q坐标系下,去掉零序分量后,可得到电机的电压和磁链方程分别为
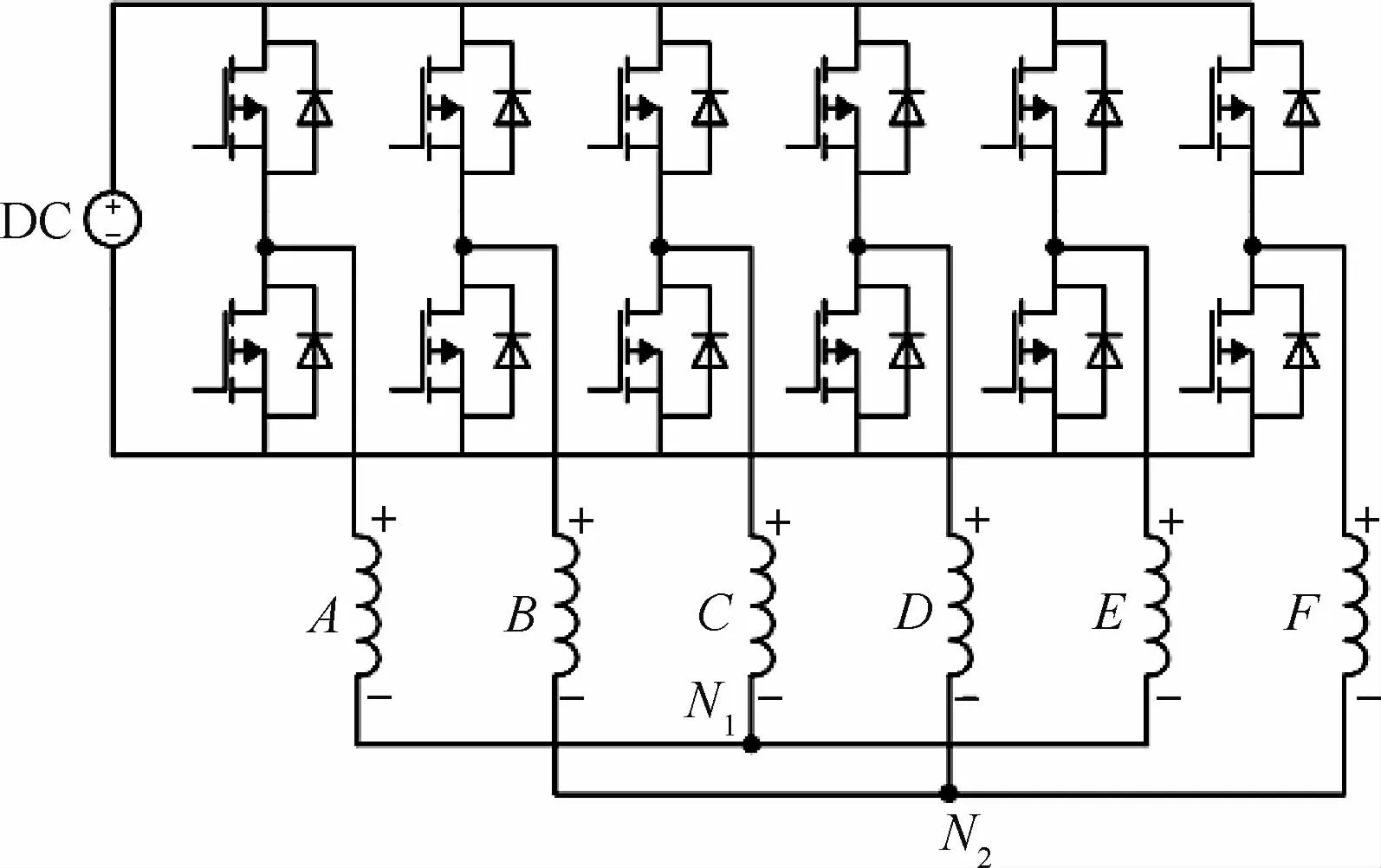
图2 双三相余度永磁同步电机逆变器结构Fig.2 Inverter structure of dual three-phase redundant PMSM
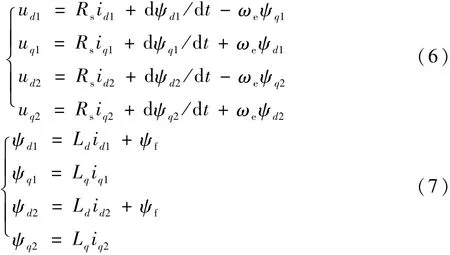
式中:ud1、uq1、ψd1、ψq1、id1和iq1分别为余度1的直轴电压、交轴电压、直轴磁链、交轴磁链、直轴电流和交轴电流;ud2、uq2、ψd2、ψq2、id2和iq2分别为余度2的直轴电压、交轴电压、直轴磁链、交轴磁链、直轴电流和交轴电流;ωe为电角频率;Ld和Lq分别为直轴和交轴同步电感,对于隐极电机而言,由于气隙均匀,可近似认为二者相等,则有

因此,可以得到电机的电磁转矩为

式中:Te1为余度1的电磁转矩;Te2为余度2的电磁转矩;pn为电机转子极对数。
式(6)~式(9)进一步说明,忽略相绕组间互感之后,双三相余度永磁同步电机完全可以等价为2个三相永磁同步电机,其电磁转矩为2个三相永磁同步电机的电磁转矩之和。双三相余度永磁同步电机系统基于双d-q变换的矢量控制框图如图3所示。图中:APR、ASR和ACR分别表示位置调节器、速度调节器和电流调节器;uα1和uβ1分别为余度1在静止坐标系下的α轴和β轴电压;uα2和uβ2分别为余度2在静止坐标系下的 α轴和 β轴电压;SVPWM 为空间矢量脉宽调制;SA,…,SF为各相桥臂开关信号;2r表示2相旋转坐标系;3s表示3相静止坐标系。
双三相余度永磁同步电机系统基于双d-q变换的矢量控制策略是由传统三相永磁同步电机d-q变换矢量控制策略扩展而来,其控制结构简单,且在正常运行或绕组开路、短路故障运行条件下,均能保证电机的对称运行,电机的相绕组电流始终保持正弦。

图3 双三相余度永磁同步电机双d-q变换矢量控制框图Fig.3 Dual d-q transformation vector control diagram of dual three-phase redundant PMSM
1.3 容错永磁同步电机系统模型
将六相永磁同步电机的六相绕组的两端分别接出,采用H桥逆变器,可构成六相容错电机系统,结构如图4所示。六相容错永磁同步电机系统采用最优转矩控制策略,该控制策略以输出转矩最优为目标,以电机瞬时铜耗最小为约束条件,通过解算求得电机各相电流,可以保证电机在正常运行或者故障运行状态下输出恒定转矩[21-22]。
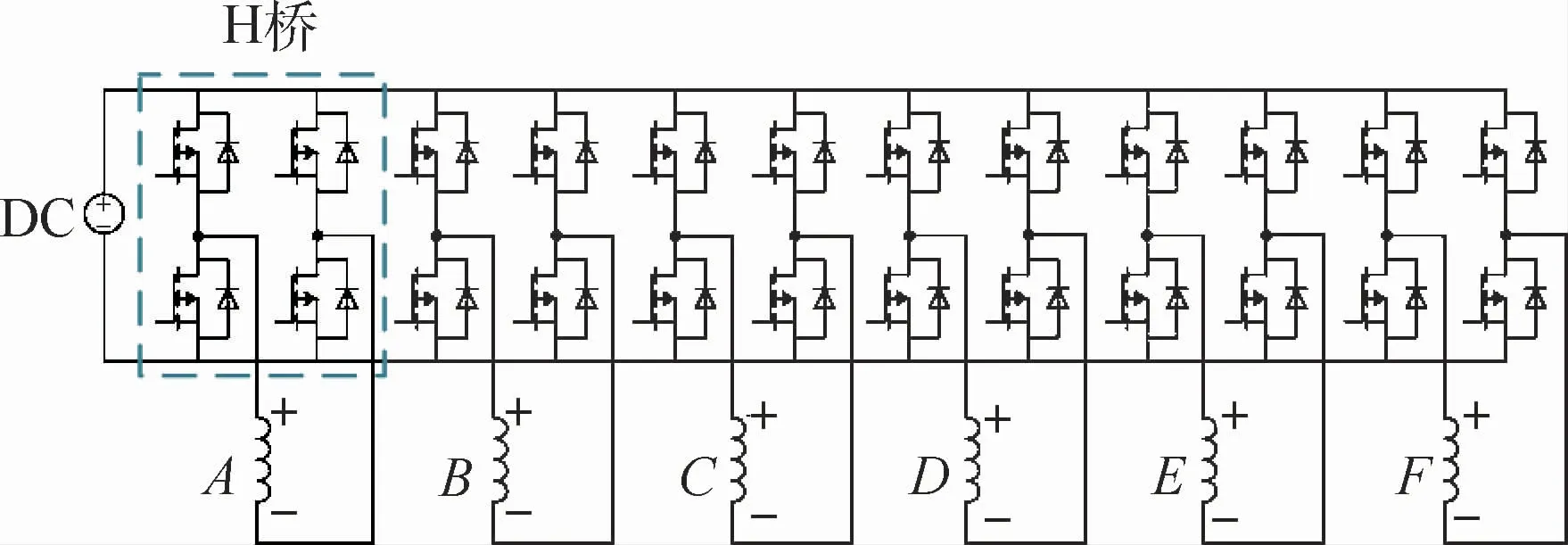
图4 六相容错永磁同步电机逆变器结构Fig.4 Inverter structure of six-phase fault-tolerant PMSM
六相容错永磁同步电机的瞬时电磁转矩可以表示为

式中:ej(t)为j相瞬时反电动势;ij(t)为j相瞬时相电流。
当发生相绕组故障时,六相容错永磁同步电机的瞬时电磁转矩可以表示为

式中:Tn(t)为电机故障后正常相产生的电磁转矩;Tf(t)为电机故障后故障相产生的电磁转矩,其表达式分别为


其中:ki表示故障所在相。
为了保证电机能够输出恒定转矩,给定如下约束条件:

式中:Tc为电机的恒定输出转矩。
为确定各相电流的唯一解,引入电机瞬时铜耗最小为约束条件:

则各相电流的求解变为多元函数求极值的最优解问题,因此可建立拉格朗日价值函数:

式中:λ为拉格朗日乘数。
由式(16)可求得各相电流表达式为

通过电流环实时控制电流跟踪其解算值,便可以保证电机输出恒定转矩。
最优转矩控制策略通过在静止坐标系下直接控制各相电流瞬时值,以达到恒定转矩输出的目的,其算法简单,避免了复杂的坐标变化,且不受电机相数的限制。最优转矩控制策略的控制框图如图5所示。
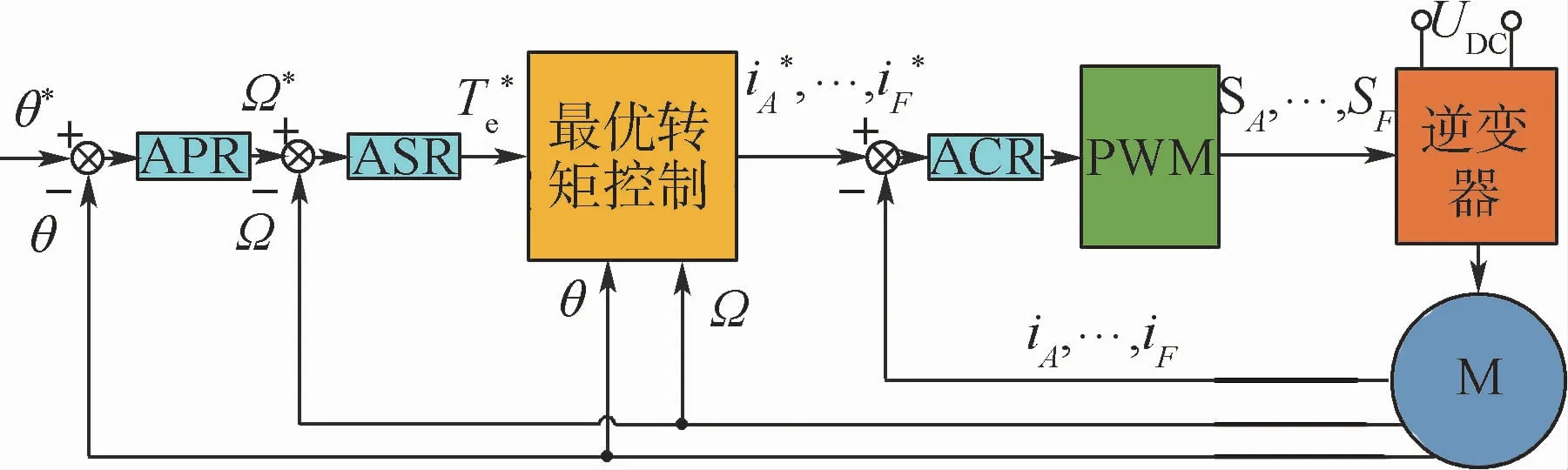
图5 六相容错永磁同步电机最优转矩控制框图Fig.5 Optimal torque control diagram of six-phase fault-tolerant PMSM
2 调速范围分析
在直流母线电压相同的条件下,六相永磁同步电机采用余度和容错2种驱动控制方式时,具有不同的相电压。由图2和图4可以看出,双三相余度永磁同步电机的相绕组采用三相星型接法,直流母线电压约束绕组的线电压;而六相容错永磁同步电机采用了单相绕组结构,直流母线电压约束绕组的相电压。由于星型接法三相绕组的线电压是相电压的倍,则对于相同的直流母线电压,六相容错永磁同步电机的相电压约是双三相余度永磁同步电机相电压的倍。电机的相电压直接影响其相绕组反电动势,进而影响其调速范围。
采用相绕组反电动势和电流同相位的控制方式,可得到六相永磁同步电机单相绕组的相量图和等效电路,如图6所示。图中:δ为电机功角。电机的相电压可以表示为


式中:Um为相电压幅值;Em为相绕组反电动势幅值;Im为相电流幅值。
定义如下常数:
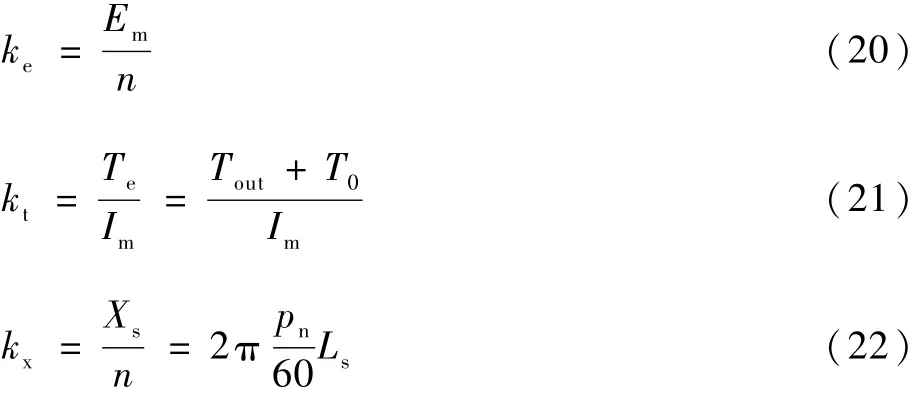
式中:n为转速;Tout为输出转矩;T0为空载转矩。
将式(20)~式(22)代入式(19)可得

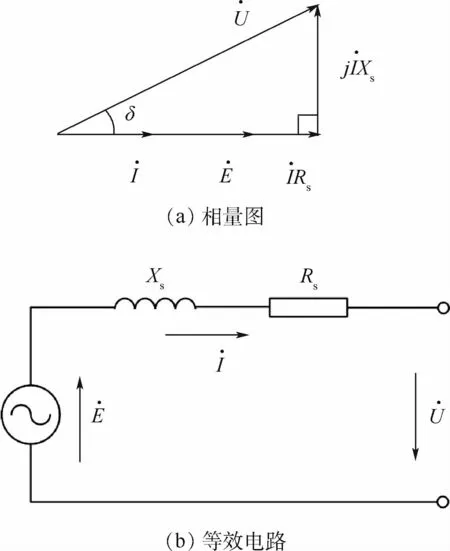
图6 六相永磁同步电机相绕组相量图和等效电路Fig.6 Phasor diagram and equivalent circuit of six-phase PMSM phase winding
式(23)描述了电机转速和输出转矩之间的关系。与传统永磁同步电机相比,一方面由于所设计的六相永磁同步电机相绕组感抗较大,对电机的相电压有较大影响,不可以被忽略。另一方面,由于电机相绕组的热约束限制了最大相电流,从而制约了输出转矩的最大值。由式(21)可知,相电流与输出转矩成线性关系,对相电流值的约束可以直接转化为对输出转矩的约束条件。同时,规定电机转速为正,由此可以得到增加约束条件后电机的转速和转矩的关系表达式为
式中:Tmax为输出转矩最大值。
根据1.2节和1.3节分析,六相容错永磁同步电机相电压即为母线电压UDC,双三相余度永磁同步电机相电压为,根据式(24)和六相永磁同步电机设计参数,可以得到2种永磁同步电机系统的转速-转矩特性曲线,如图7所示。由此可以得知,在相同转矩条件下,相比于余度驱动控制方式,六相永磁同步电机采用容错驱动控制方式时具有更宽的调速范围,在不同输出转矩下的调速范围提高了73%以上。
在Ansoft/Simplorer仿真环境中,分别建立双三相余度永磁同步电机系统和六相容错永磁同步电机系统仿真模型,对2种永磁同步电机系统的调速范围进行了仿真研究。图8为2种永磁同步电机系统的转速-转矩特性曲线仿真结果,与理论分析结果基本一致。

图7 双三相余度永磁同步电机和六相容错永磁同步电机的转速-转矩特性曲线Fig.7 Speed-torque curves of dual three-phase redundant PMSM and six-phase fault-tolerant PMSM
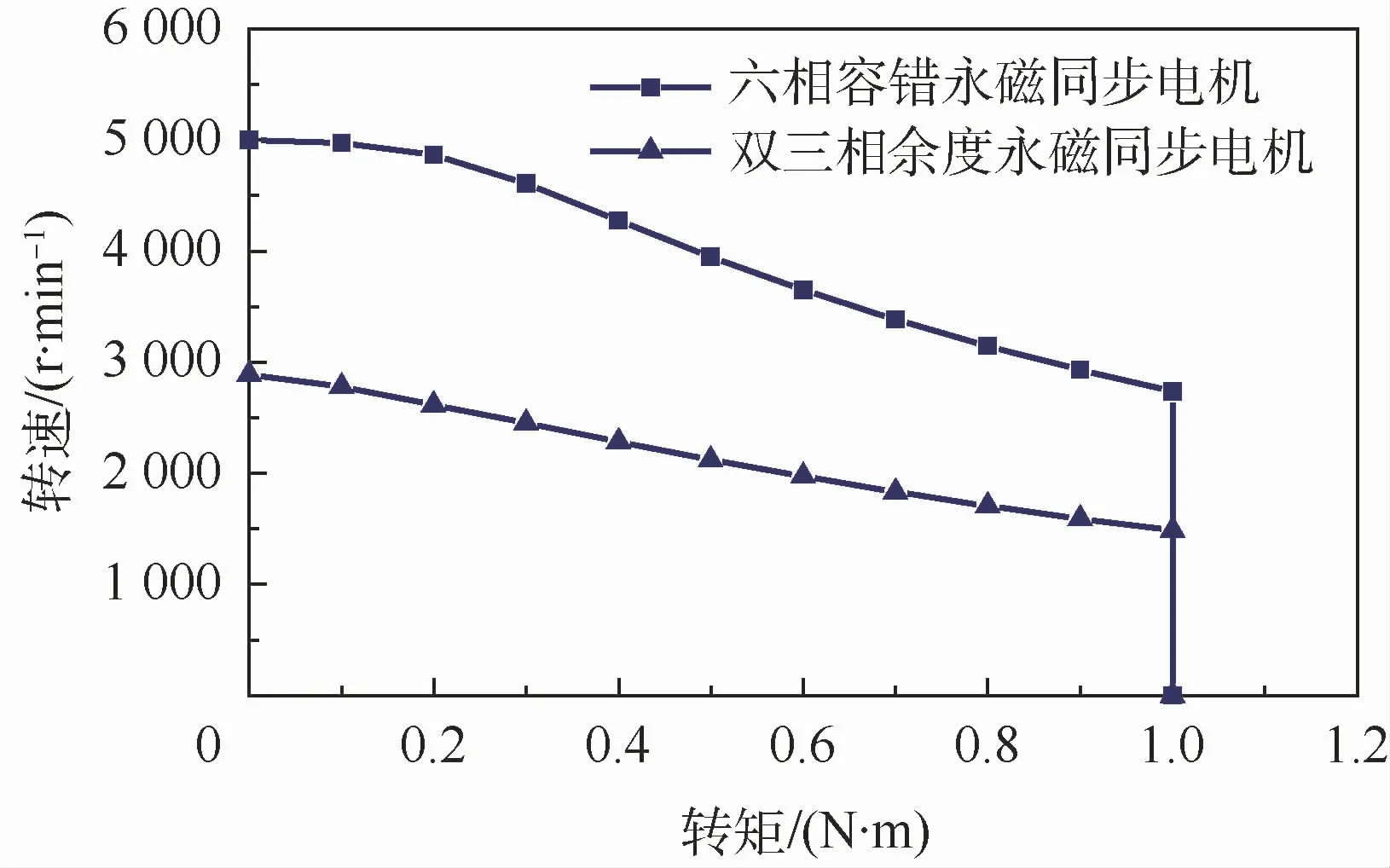
图8 双三相余度永磁同步电机和六相容错永磁同步电机的转速-转矩特性曲线仿真结果Fig.8 Speed-torque simulation curves of dual three-phase redundant PMSM and six-phase fault-tolerant PMSM
3 动态性能分析
六相永磁同步电机每相绕组的瞬态电压方程可表示为

式中:u为瞬时相电压;e为瞬时反电动势;i为瞬时相电流。
由式(25)可知,相电压将影响电机相绕组反电动势和相电流,即影响电机的转速和转矩性能。由式(5)可知,电机的转速和转矩性能会影响电机的位置伺服动态性能。因此,余度和容错永磁同步电机相电压的不同将引起两者位置伺服动态性能的差异。
在Ansoft/Simplorer仿真环境中,对2种永磁同步电机系统的位置伺服动态性能进行了仿真分析。给定位置指令为60°机械角度的阶跃信号,2种永磁同步电机系统的位置、转速和电磁转矩仿真波形如图9所示。可以看出,六相容错永磁同步电机在电磁转矩快速性上稍优于双三相余度永磁同步电机,其转速峰值也稍高于双三相余度永磁同步电机,从而六相容错永磁同步电机的位置跟踪性能略好于双三相余度永磁同步电机,如图9(a)所示,其中双三相余度永磁同步电机响应曲线的上升时间为11.03 ms,而六相容错永磁同步电机的上升时间为10.74 ms,减少了2.6%。给定位置指令为360°机械角度的阶跃信号时,2种永磁同步电机系统的位置、转速和电磁转矩仿真波形如图10所示。由于给定的阶跃位置指令值较大,2种永磁同步电机系统均到达了其转速限幅值,相比于双三相余度永磁同步电机,由于六相容错永磁同步电机具有更宽的调速范围,其位置伺服动态性能更优。在该指令下,双三相余度永磁同步电机响应曲线的上升时间为20.94 ms,六相容错永磁同步电机的上升时间为14.73 ms,减少了29.7%。可以得知,与余度驱动控制方式相比,六相永磁同步电机采用容错驱动控制方式在电磁转矩动态性能和调速范围上的优势可以提升其位置伺服动态性能。
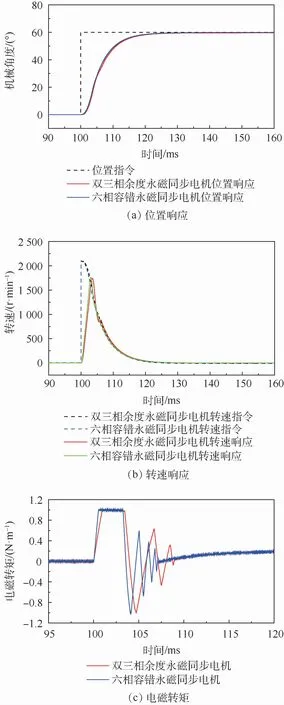
图9 双三相余度永磁同步电机和六相容错永磁同步电机在60°阶跃指令下的位置、转速和电磁转矩仿真曲线Fig.9 Simulation curves of position,speed and electromagnetic torque for dual three-phase redundant PMSM and six-phase fault-tolerant PMSM with a 60°step instruction
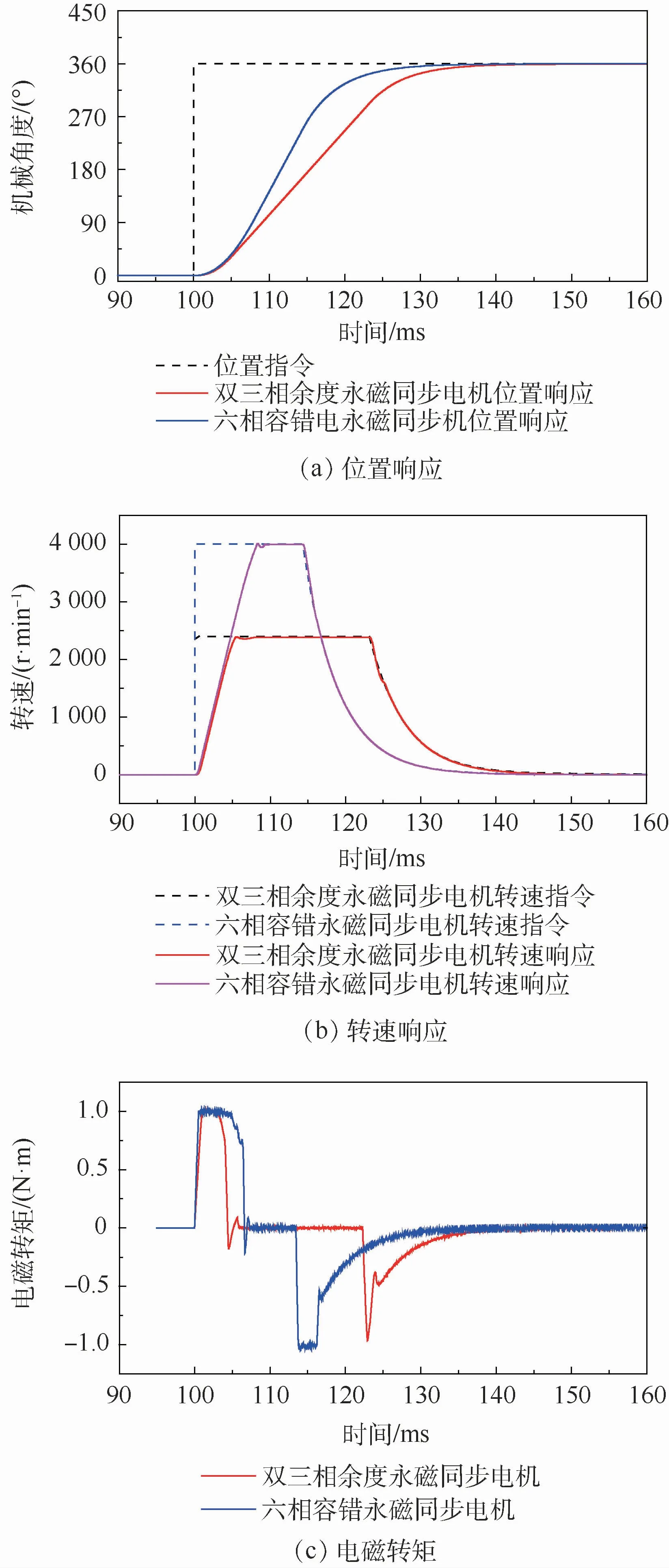
图10 双三相余度永磁同步电机和六相容错永磁同步电机在360°阶跃指令下的位置、转速和电磁转矩仿真曲线Fig.10 Simulation curves of position,speed and electromagnetic torque for dual three-phase redundant PMSM and six-phase fault-tolerant PMSM with a 360°step instruction
4 实 验
为验证理论和仿真分析的有效性,对六相永磁同步电机不同驱动控制方式下的位置伺服动态性能进行了实验研究,系统实验平台如图11所示,其由六相永磁同步电机、驱动控制系统、供电电源和CAN演示平台组成。
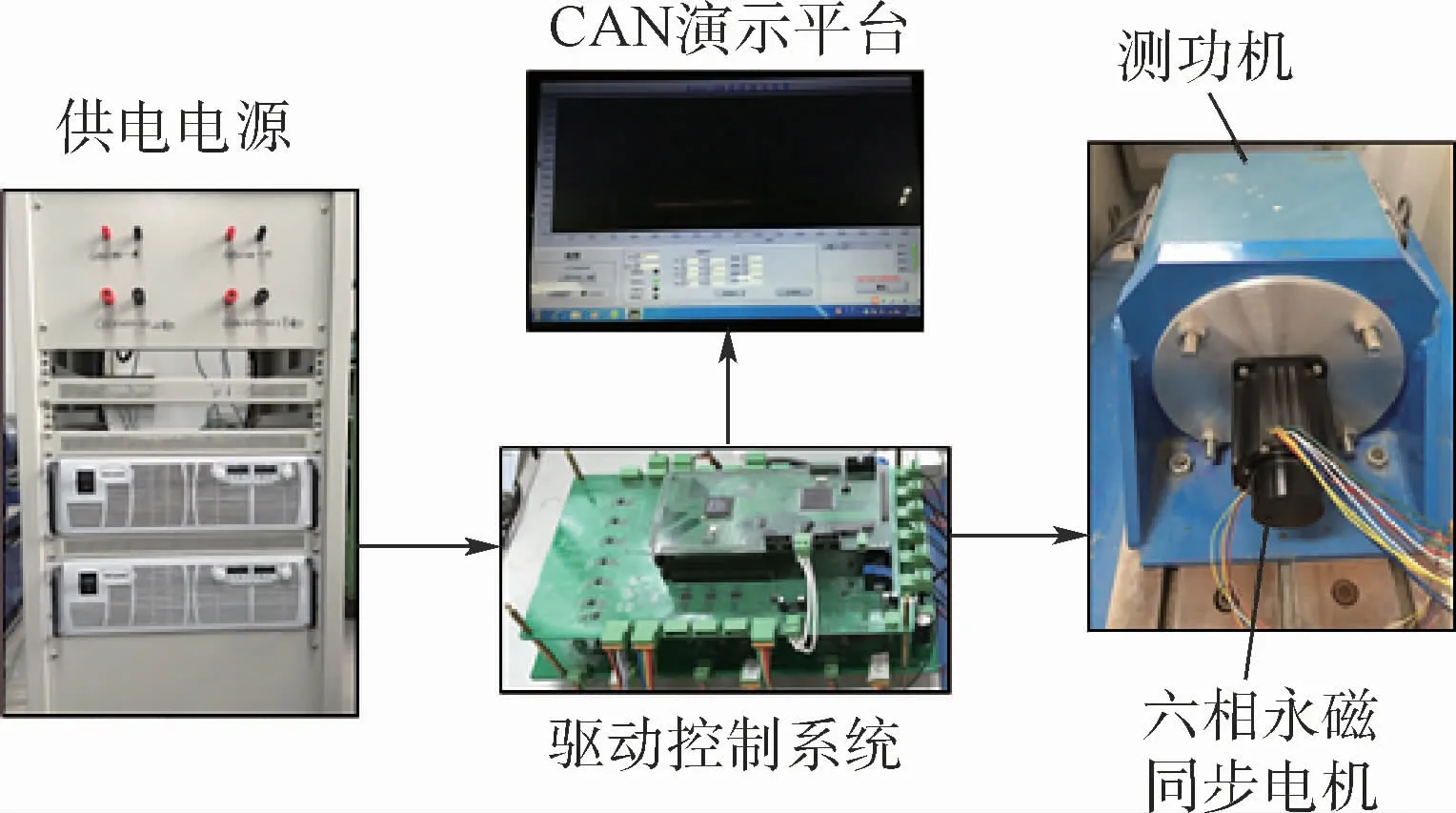
图11 六相永磁同步电机系统实验平台Fig.11 Experimental platform of six-phase PMSM system
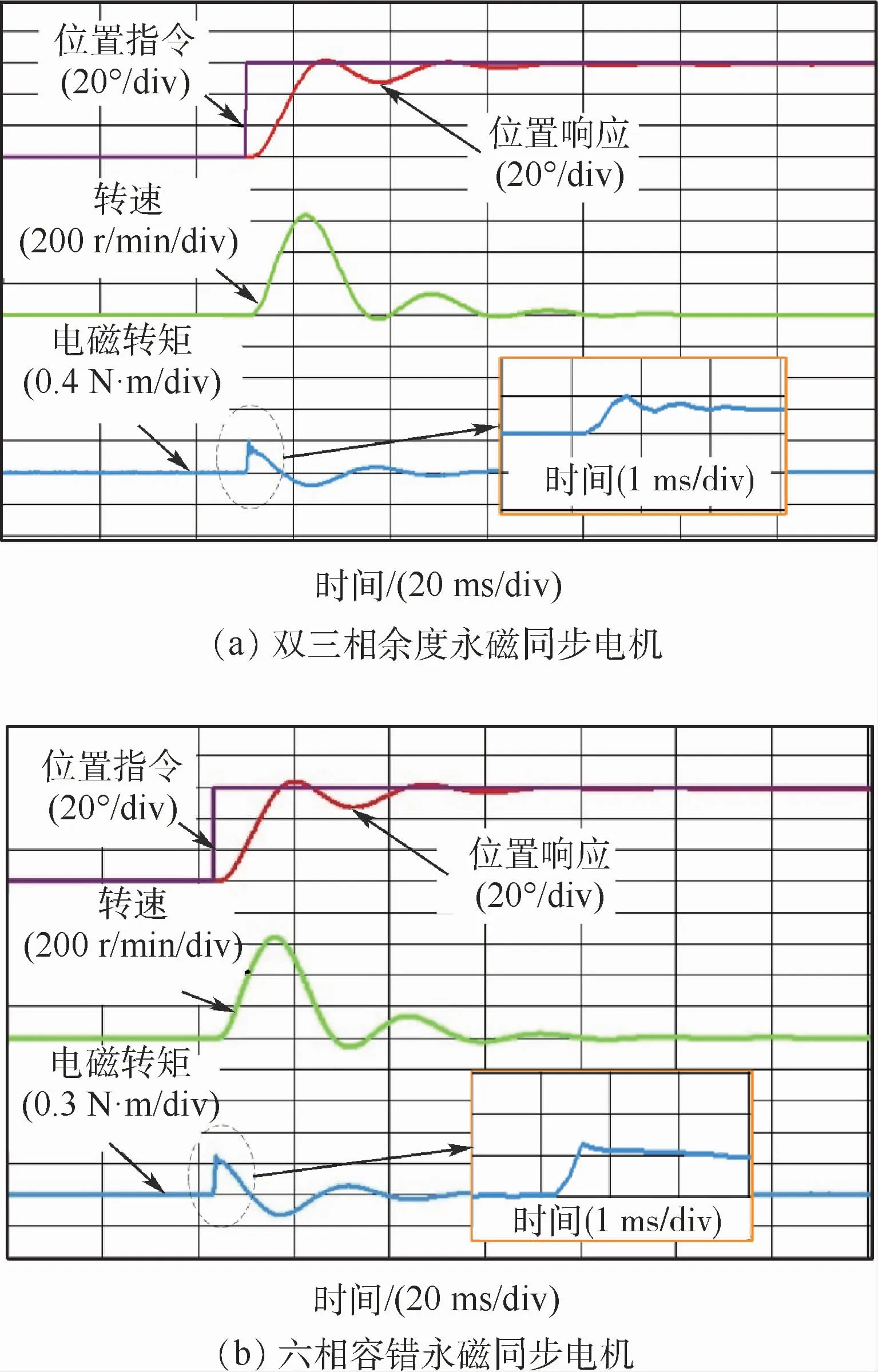
图12 双三相余度永磁同步电机和六相容错永磁同步电机在60°阶跃指令下的位置、转速和电磁转矩实验波形Fig.12 Experimental waveforms of position,speed and electromagnetic torque for dual three-phase redundant PMSM and six-phase fault-tolerant PMSM with a 60°step instruction

图13 双三相余度永磁同步电机和六相容错永磁同步电机在360°阶跃指令下的位置、转速和电磁转矩实验波形Fig.13 Experimental waveforms of position,speed and electromagnetic torque for dual three-phase redundant PMSM and six-phase fault-tolerant PMSM with a 360°step instruction
给定60°和360°机械角度的位置阶跃指令,图12和图13分别为双三相余度永磁同步电机系统和六相容错永磁同步电机系统的位置、转速和电磁转矩波形。从图12可以看出,在60°位置阶跃指令下,2种永磁同步电机系统的电磁转矩和转速波形类似,但六相容错永磁同步电机的电磁转矩上升速率较快,六相容错永磁同步电机和双三相余度永磁同步电机电磁转矩到达峰值时间分别为0.61 ms和0.8 ms,六相容错永磁同步电机的转速峰值也稍高于双三相余度永磁同步电机,从而,六相容错永磁同步电机位置伺服性能稍优于双三相余度永磁同步电机,两者位置响应的上升时间分别为8.8 ms和9 ms。从图13可以看出,在360°位置阶跃指令下,双三相余度永磁同步电机转速到达限幅值,出现平顶段,而六相容错永磁同步电机由于调速范围较宽,可以到达较高的转速峰值,因此,其位置伺服性能更优,六相容错永磁同步电机和双三相余度永磁同步电机的位置响应上升时间分别为16 ms和24.8 ms。实验结果表明,与双三相余度永磁同步电机相比,六相容错永磁同步电机的位置伺服动态性能更优,其在60°和360°位置阶跃指令下的响应曲线上升时间分别减小了2.2%和35%。
5 结 论
本文研究了不同驱动控制方式对六相永磁同步电机性能的影响。六相永磁同步电机采用余度和容错2种驱动控制方式,可分别构建成双三相余度永磁同步电机系统和六相容错永磁同步电机系统,通过建立2种永磁同步电机系统的驱动控制模型,研究了两者在调速范围和动态性能的优劣,结论如下:
1)在调速范围方面,对于相同的直流母线电压,相比于余度驱动控制方式,六相永磁同步电机采用容错驱动控制方式时具有更高的相电压,因此其调速范围更宽,在不同输出转矩下的调速范围提高了73%以上。
2)在动态性能方面,相比于余度驱动控制方式,六相永磁同步电机采用容错驱动控制方式时具有更好的转矩控制性能和更宽的调速范围,因此其位置伺服动态性能更为优越。
猜你喜欢
科技与创新(2021年2期)2021-01-29 07:37:50
防爆电机(2020年6期)2020-12-14 07:16:54
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
西北工业大学学报(2018年4期)2018-09-07 10:31:04
舰船科学技术(2017年11期)2017-11-27 08:34:22
光学精密工程(2016年3期)2016-11-07 09:03:49
西北工业大学学报(2015年1期)2016-01-19 03:30:02
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
大电机技术(2015年5期)2015-02-27 08:22:28