
简易分析判断语音识别智能车的设计
2019-07-29 00:56黄恒一丁佳乐黎顺康郢芮付三丽
物联网技术 2019年5期
黄恒一 丁佳乐 黎顺 康郢芮 付三丽


摘 要:文中在研究人工智能和物联网技术的基础上,设计了一个简单的语音识别可控远程视频监控智能车辆分析判断机器人。该智能车机器人可以接收用户发出的语音指令,并对用户的语音指令进行分析后响应。此外智能车身搭载的安卓智能机器可采集智能车附近的信息并将采集到的图像信息通过无线方式反馈至用户接收设备,从而实现对智能车运动视野范围内图像信息的监控。
关键词:蓝牙通信;语音控制;视频监控;物联网;人工智能;语音指令
中图分类号:TP393 文献标识码:A 文章编号:2095-1302(2019)05-0-05
0 引 言
世界上很多发达国家都在进行机器人技术的研究。本文在智能小车军用、民用需求量逐步加大的环境下,结合安卓智能手机、移动机器人、人工智能技术中的语音识别技术、人的视觉系统与摄像头传感器技术,设计了语音识别可控远程视频监控智能车辆分析判断机器人。
1 原 理
当今社会,智能手机作为一个新兴领域,正在被越来越多地应用到不同领域,大大提高了工作效率。人工智能机器人技术是当下企业及科研机构研究的重点,而智能车辆作为移动机器人的一个重要分支也得到了越来越多的关注。本文设计的智能小车是一个集语音识别、无线通信、安卓编程、摄像头图像采集、无线传输等功能于一体的综合系统,具备简易思维判断能力,可以识别出正确与错误的语音控制指令。本文对当下几种常见的无线视频监控技术进行了简单探讨,并在此基础上设计了采用安卓手机改造的简易无线监控器。文中设计的智能车无线监控器可采集智能车附近的实时图像信息,并反馈至与智能车身安卓机同一局域网内的视频监控设备,本文研究的监控智能小车实物具有一定的科研及应用价值[1]。
2 设计流程
2.1 智能小车设计思路
智能手机通过调用手机语音识别器识别汉语词汇,语音词汇通过Android手机的语音识别引擎转化为智能车芯片运动状态约定字符,当智能手机识别出正确的汉语词汇后,就会通过Android手机的蓝牙客户端与智能小车的蓝牙服务端建立无线信道,传输智能车运动状态控制指令。当智能小车接收到语音运动状态控制指令后,会通过小车的单片机芯片进行解析,驱动小车电极,从而控制小车运动状态的改变。错误的语音控制指令无法改变智能车的运动状态,同时智能车还将把错误的语音控制指令通过语音反馈形式传达给使用者[2]。本文在研究智能车语音识别功能外,还对几种常见的智能车视频监控技术进行了研究、尝试和对比,提出了一种基于华为手机分屏技术实现的分析判断语音识别监控智能车。语音视频监控智能车如图1所示,智能车视频监控流程如图2所示。
2.2 智能车的动力系统
本文设计的智能车动力供应系统由6节1.5 V的干电池组成。智能小车的单片机芯片、蓝牙接收芯片及智能小车的L298N驱动芯片所需电压由5 V电源提供。因此需在智能小车的主板上安装7805三端稳压模块,将9 V输入电压转换至5 V,供系统单片机、蓝牙和L298N电机驱动模块使用。智能车俯视图如图3所示,侧视图如图4所示。
通过图3可看到智能车前端安装有一个铁夹子,可实现车身前端智能手机的搭载及去除。智能车搭配摄像头主要涉及车身平衡及稳定等因素。该设计中由安卓智能机改造的监控摄像头基本可实现智能车二维空间视野范围内图像信息的采集[3]。
由图4可知,智能车主板上的器件主要包括单片机芯片,可梳理小车蓝牙服务器接收到的运动状态控制指令并解码,通过L298N电机驱动芯片驱动智能小车运动。此外,小车前端搭载的安卓智能机用于采集小车视野范围内的图像信息。
2.3 智能小车APP手机控制端的设计
与智能小车配套的APP控制端通过MIT APP Inventor第三方在线开发平台进行设计。智能小车APP控制端主要由蓝牙传感器、语音识别传感器、文本语音转换器组成,智能车可对用户的语音控制指令进行分析判断[4]。
2.3.1 智能车语音答复功能
智能车通过MIT APP Inventor在线开发平台中的语音识别传感器完成对正确的运动状态语音的反馈。当安卓智能手机的语音识别引擎解析到正确的语音后,会首先调动蓝牙客户端发送智能车运动状态控制指令,之后调动文本语音转换器,念读设计者预先定义的语音反馈语句。在实际开发测试过程中,部分安卓手机不具备语音识别引擎模块,这时开发者就需要借用第三方语音识别引擎模块[5]。智能车语音控制端如图5所示,第三方语音识别引擎如图6所示,小车语音识别界面如图7所示,语音识别APP部分代码如图8所示。
由图6可知,由于部分安卓机未配备语音识别引擎,因此文中的语音识别智能车用户控制端APP需借助第三方语音识别引擎实现智能小车用户端的语音识别。
由图7可知,开启小车语音识别按钮后,语音识别引擎可以识别用户发出的正确的目的词汇,之后小车APP将其转化成小车运行指令。
由图8可知,当用户发出正确的语音并被APP识别后,APP会通过预先编程设定的指令将用户发出的语音指令转换成小车运动指令,并调动文本语音转换器播放相应的文本信息,产生类似人类对话的人机对话效果。
本文设计的小车语音识别APP模块可进一步开发,实现全程无触碰语音控制驱动小车运动,甚至通過正确的语音密码指令取得小车的合法权限。小车语音识别模块的实现具备一定的科研应用价值[5]。
2.3.2 智能车语音分析判断功能
智能车语音控制指令分析判断功能通过MIT APP Inventor在线开发平台代码逻辑开发界面“或”语句内置块完成。当用户发出正确的语音控制指令后,会首先通过程序代码中的“或”语句进行判断,若属于智能车运动指令组,则调用蓝牙客户端发送相应的智能车运动状态指令,之后调用文本语音转换器念读相应的语音文本;若用户发出的语音控制指令不属于智能车运动指令组,则会通过程序代码中的“或”语句进行分析判断,在不改变智能车运动状态的前提下产生语音反馈提示给使用者[6]。
2.4 智能小车图传模块
随着信息技术的发展,智能小车在人类科学勘探研究中的作用越来越重要。文中通过选取智能小车科学研究中的图传功能模块,对几种常见的智能车无线图传技术进行研究、探讨。本文采用的智能车无线图传模块技术可实现与智能小车处于同一局域网中的多平台设备对小车监控图像信息的实时共享,此外智能小车视频监控反馈界面还可从PC端移植到手机端。若采用华为手机分屏技术并结合IP摄像头,可将小车监控画面窗口和小车控制界面窗口放于同一屏幕,提高设备监控的实时反馈性。
2.4.1 智能车无线图像传输比较
作为智能小车重要的核心模块—无线图像传输,近年来伴随着智能网联汽车的发展,越来越引起国内各大高校的兴趣。本文旨在研究利用网上的开源软件实现安卓手机的改造,将监控端、PC等平台设备作为图像接收反馈端等常见的智能车图像传输方案,揭开用户对智能车视频实时监控功能的“神秘面纱”[7]。
2.4.2 DroidCamX无线监控方案
DroidCamX是一款可以将安卓手机改造成无线摄像头的工具。在网络上下载DroidCamX压缩包,解压后的DroidCamX包含两个软件,即安卓客户端APK与电脑图像接收端exe可执行软件。智能车图传选取DroidCamX无线监控方案时,应首先启动安装在手机端的视频监控APP,由手机摄像头采集智能车附近的图像信息,之后PC端DroidCamX连接软件设置视频通信配置信息,点击PC端摄像头开启软件,此时电脑弹出的图像窗口内容就是安卓手机监控反馈的实时图像。智能车PC图像接收端如图9所示,智能车安卓图像监控APP如图10所示,电脑图像监控开启端如图11所示,智能车实时监控画面如图12所示。
由图9和图10可知,当安卓智能机监控端APP启动后,视频监控信息配置完毕,启动电脑上视频开启软件将开启智能车的视频监控功能。智能小车前端搭配的安卓智能机改造的图像信息监控端将采集到的图像信息反馈到用户PC电脑上的图像窗口。采用DroidCamX无线监控方案的智能小车的优点是图像传输方便,用户将通过智能小车采集的实时图像信息反馈到用户PC端,相比通过复杂的嵌入式技术实现的图像传输设备而言,该小车的可拓展性、反馈的视频监控信息实时性较差[8]。
2.4.3 Eclipse实现的无线监控方案
DroidCamX无线监控智能车视频监控方案施行简单,但图像反馈端无法根据用户需求进行修改。第二类智能车无线监控方案基于Eclipse+ADT+Android SDK+JDK(x64),ADT(Android Development Tools)安卓開发工具,Android SDK实现安卓虚拟机的创建与JDK(x64)安卓Java环境变量的配置。借助Eclipse实现安卓APP代码的编辑及编译工作。
基于Eclipse实现的智能车无线监控方案中,图像采集监控端仍旧由安卓手机改造,安卓手机采集的图像信息通过无线WiFi传至目的服务器的Java图像窗口。视频图像采集端的APP及Java图像接收端的窗口可根据用户需求进行适当修改。Eclipse监控端APP如图13所示,Eclipse图像监控反馈端如图14所示,Eclipse图像监控智能车如图15所示,智能车监控图像保存如图16所示。
由图13和图14可知,采用Eclipse方案实现的监控智能车可采集智能车前端改造摄像机视野范围内的信息,之后将采集的图像信息传递至服务器电脑。此外,用户可以根据自身需求保存需要的图像信息。
由图15可知,采用Eclipse实现的无线监控智能车实时图像采集的过程是Android作为Socket客户端将采集到的每一帧图像数据发送出去后,PC作为服务器接收并显示每一帧图像从而实现远程监控。安卓智能机客户端APP获取了手机摄像头的权限,安卓APP登录框获取用户填写的服务器IP信息,安卓手机采集的图像信息传递到服务器端通过Eclipse软件打开Java图像显示窗口。
由图16可知,采用Eclipse技术实现的智能小车用户端可通过图像接收界面窗口实时对小车采集反馈的图像信息进行抓拍、保存。采用Eclipse和DroidCamX技术实现的智能车监控功能均采用安卓进行改造,对比利用复杂的嵌入式知识而实现的监控智能车而言是一种简易方案。本文目前涉及的两种智能车视频监控方案易于接受,用户进行简单的学习即可实现图像信息的实时监控,但采用这两种技术实现的监控智能车,图像监控信息均反馈至用户PC,而智能车的监控反馈信息和智能小车控制端APP不在同一平台上,因此相比利用专业嵌入式技术开发的监控小车来说,用户监控小车的实时性体验较差[9]。
2.4.4 IP摄像头无线监控方案
本文在涉及智能车无线图像传输功能时考虑了几点因素,即技术的可实现性与监控智能车控制端的可移动性。目前可利用专业的嵌入式技术实现图像无线传输、利用网络开源软件实现基于安卓手机改造的无线图像监控器等,本文对网络开源软件实现的基于安卓手机改造的无线图像监控器方案技术进行了研究、尝试,最终决定将安卓手机作为图像监控端,将多平台浏览器作为智能车运动视野二维空间范围内图像信息接收端IP摄像头。
2.4.5 智能车客户端移动性
本文选定的IP摄像头实现的无线监控方案可以将采集的视频信息实时分享给多平台用户,解决了传统监控智能车摄像头采集的图像信息与智能车用户之间的一对一通信局限问题。前文阐述的两种智能车视频监控方案中,智能车图像监控用户端可移动性较差。
本文针对如何解决智能车监控端可移动性的问题,参考了当下几种技术方案:
(1)利用专业知识设计的透明背景APP结合智能车方向控制按键,实现对智能车运动状态的实时控制,通过智能车上搭载的摄像头采集二维空间图像信息;
(2)利用安卓手机的分屏软件实现图像同屏;
(3)利用华为手机成熟的分屏技术实现图像同屏。
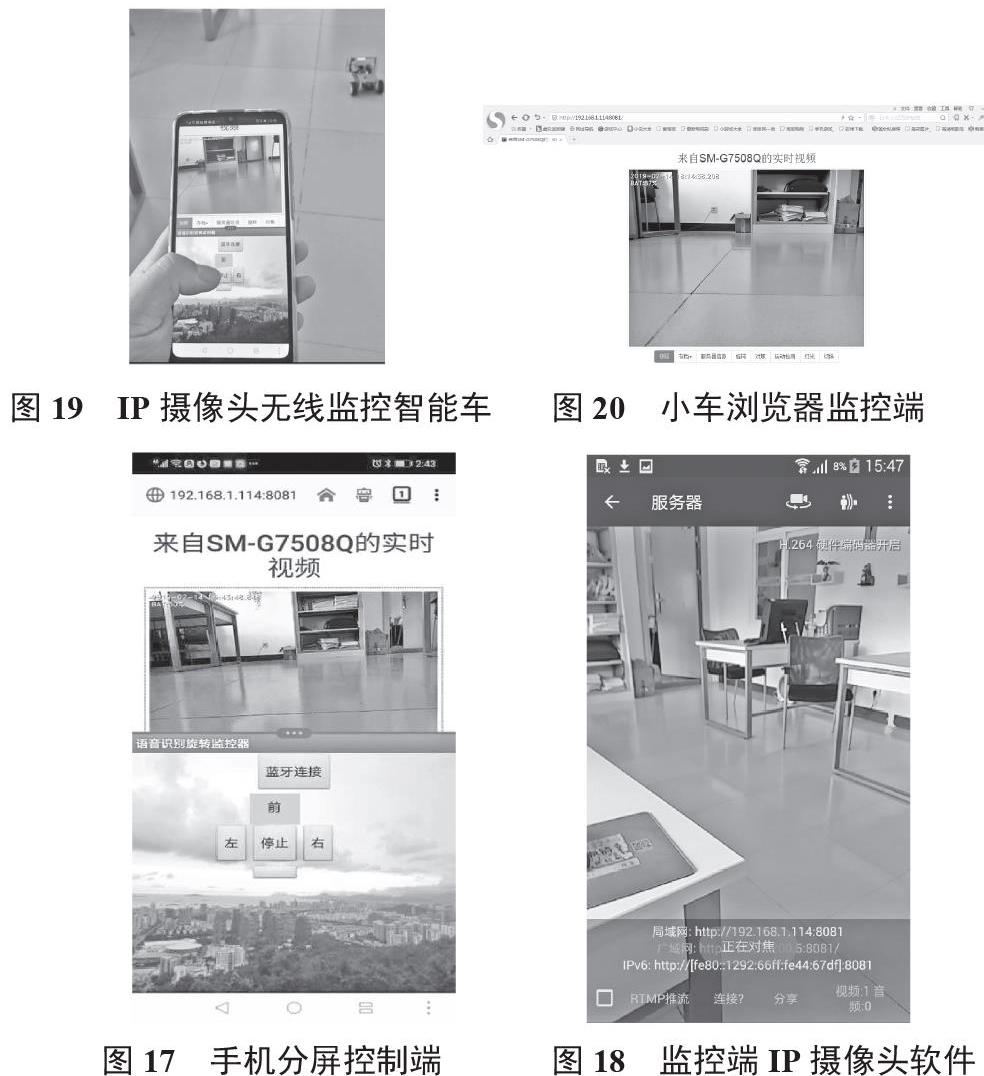
对比上述三种方案,方案1技术繁琐,耗费时间,需要专业技术科研人员才能实现,但优点是可以根据用户需求进行量化定做;方案2需要智能小车监控手机端ROOT解锁,为用户手机安全带来一定的风险;方案3中,华为手机拥有成熟的分屏技术,可以轻松实现手机屏幕分屏,在手机上半部分显示智能车监控窗口,下半部分显示智能小车的控制界面。手机分屏控制端如图17所示,监控端IP摄像头软件如图18所示。
由图17可知,当手机监控端开启视频监控功能后,在智能手机同一局域网环境中的移动设备浏览器地址栏输入监控视频的地址,即可实现在线信息的实时分享。小车监控视频可分享至同一局域网中的多平台设备,突破了传统智能车无线监控视频一对一的用户通信限制[10]。
由图18可知,通过结合华为手机成熟的分屏技术,普通用户都可将智能小车视频监控实时图像反馈端从PC机移植到用户的安卓手机端,使得用户视频控制监控端设备的可移动性更好。IP摄像头无线监控智能车如图19所示,小车浏览器监控端如图20所示。
由图19可知,用户通过华为手机可在操作小车运动的同时观看智能小车采集的实时图像信息,此外采用华为手机分屏技术可将智能小车视频实时监控信息界面窗口与小车控制端界面窗口安放于同一屏幕界面。经测试,本文小车采用的第三种无线监控技术,方案简单,二次开发拓展价值大。由图20可知,与小车车身前端充当摄像头的安卓机处于同一局域网环境中的设备可实时分享小车监控端采集的图像信息。
2.5 智能小车设计创新
本文设计的智能车创新点:具有语音动态无线控制功能,智能小车能解析出用户发出的正确与错误的语音控制指令并产生相应的反馈和语音提示。本文设计的语音识别智能车针对以往智能车领域按键控制的智能车而言,具有一定的突破,在一些生活领域及场合使用智能车技术安全性更佳;其次本文设计的智能车视频监控模块采用华为手机的分屏技术,使得智能小车监控视频信息反馈端从用户的PC机移植到手机端,小车监控界面窗口与控制界面窗口处于同一屏幕界面,提高了小车操作的实时性;采用IP摄像头改造的安卓智能机作为小车的摄像头,实现了小车视频监控端与局域网内多平台设备的实时共享,突破了传统智能小车视频监控端与用户端通信之间的一对一限制,此外控制小车运动状态的APP基于图形化界面MIT APP Inventor第三方在线开发,用户开发智能小车上位机难度降低。
2.5.1 智能小车核心技术
智能小车用户将安卓手机作为智能车语音控制端,借用安卓手机具备的蓝牙发射模块发送语音控制指令;之后智能车手机端APP采用MIT APP Inventor在线编程开发平台进行设计,大大提高了开发者的效率,智能车语音识别模块的设计结合了MIT APP Inventor在线编程开发平台中的语音识别传感器及文本语音转换传感器,智能车语音分析模块则结合了MIT APP Inventor在线编程开发平台逻辑开发中的“或”语句,判断用户的语音指令是否属于智能车的语音控制指令组;最后小车监控部分结合华为手机分频技术,使得IP摄像头改造的无线监控模块轻易实现了智能小车监控端与控制端处于同一屏幕的目标。
2.5.2 智能小车未来拟研究点
文中设计的智能小车可以由智能安卓手机通过蓝牙对小车进行实时动态控制,智能车识别、分析并响应用户的语音控制指令,合法的语音指令能够驱动智能车运动,不符合规定的语音指令无法驱动智能车运动。未来拟结合嵌入式系统进行智能小车研究,一方面尝试如何实现智能车摄像头图像的高清采集及传输;另一方面尝试如何实现智能车更加复杂的语音识别算法的控制。此外,还会结合当下智能小车前沿技术探索具有更复杂功能的小车勘探测试新功能。
3 结 语
本文设计的智能车安卓手机客户端可以对用户的语音指令进行简单的分析、判断及响应,此外智能车上搭载的安卓智能机改造的摄像头可实时将采集的图像信息通过WiFi方式传送给与小车处于同一局域网中的多平台视频监控端。本文设计的语音识别可控远程视频监控智能车具备一定的科研及二次开发价值。
参 考 文 献
[1]王诗元,吕子豪,田洪亮.摄像头组智能车图像预处理算法研究[J].无线互联科技,2014(11):136.
[2]王玲玲,梁勇.基于摄像头的自主循迹智能车设计[J].计算机与数字工程,2017,45(11):2314-2316.
[3]程志江,李剑波.基于遗传算法的智能小车模糊控制系统的研发[J].自动化仪表,2009,30(8):4-7.
[4]張云洲,师恩义,吴成东,等.基于CCD的智能车导航系统研究[J].东北大学学报(自然科学版),2009,30(2):162-165.
[5]邱铁,徐子川,江贺.基于模糊控制的智能车路况识别[J].计算机工程与应用,2009,45(14):213-216.
[6]郑建立,黄丽佳,葛鹏飞,等.基于CCD的智能车寻迹方法[J].东华大学学报(自然科学版),2008,34(6):728-731.
[7]许欢,唐竞新.调制光寻线系统及其在自动行走机器人中的应用[J].清华大学学报(自然科学版),2002(1):115-117.
[8]程鸿芳,钱峰,李敏.基于摄像头的智能车黑色虚线识别算法研究[J].重庆科技学院学报(自然科学版), 2014,16(1):147-149.
[9]李少伟,程辉,王胜正.智能车运动仿真平台设计[J].计算机系统应用,2018(3):51-56.
[10]张德干,张婷,高瑾馨.一种面向智能车联网的缺失数据估计新方法[J].计算机应用研究,2019(11):12-13.
