
低成本刚柔结合三指机械手设计
2019-07-29 00:41刘粤
无线互联科技 2019年9期
刘粤

摘 要:文章设计了一种可用于实际生产和生活的三指机械手设计,并描述了其发明目的、具体结构和工作原理。文章对于以往的机械手进行了改进,使用了利用尼龙绳牵引的欠驱动设计,达到了较小驱动元件驱动较多自由度的目的,并采用了3D打印技术硅胶材料,使得整个设备更为轻便,降低了设备的成本。以STM32F103ZET6单片机为处理核心,利用PWM输出改变占空比实现对舵机的控制。在满足机械手抓取和释放物体的前提下,突出了欠驱动、轻便、成本较低、适用范围广的特点。
关键词:三指机械手;欠驱动;3D打印;PWM输出;占空比
1 机械手发展简介
早在20世纪70年代,世界上各个国家就开始了对机械手的研究,有不少的优秀成果,例如日本的Okada多指智能手、美国斯坦福大学的Stanford/JPL多指智能手、美国麻省理工学院和犹他大学联合研制的Utah/MIT手,这类早期机械手的研发已经比较成熟。拥有多自由度的智能手已越来越接近人类的双手,也具备了操作的灵活性以及运转的稳定性。然而,使机械手具有足够的灵巧程度的代价是需要使用大量大传感器,导致了操作具有较高的复杂性,并随之带来成本高、周期长的问题。
相比国外领先的机械手研究,我国在20世纪80年代之前对于机械手领域的研究几乎为0,20世纪80年代以后,许多研究机构开始着手研究,取得了一定的成绩。具有代表性的研究机构包括中国科学院合肥智能机械研究所、清华大学、东北大学、哈尔滨工业大学等。为了解决“如何利用最少的驱动原件来驱动更多的自由度”的问题,不同的科研机构采用了许多独到的方法,东北大学利用多自由度差动的驱动原理,哈尔滨工业大学则采用动滑轮机构、滑轮机构设计了一种电驱动的三指机械手。但是产品仍旧存在关节数目多、结构复杂、体积大、成本高的缺点,因此,在国内智能手的应用并不够广泛,大多在大型的工业生产之中使用,难以贴近日常生活。
随着经济的发展与社会的进步,“科技贴近生活”的趋势越来越强烈,如何将机械手的使用更好地推广延伸到生活中的方方面面已经成为大家思考的关键,只有解决了机械手结构复杂、体积大、成本高的问题,机械手才有可能得到更加广泛的应用,更加贴近人们的日常,帮助人类提高工作效率,造福于人类的生活。针对这些问题,本项目设计了一种低成本刚柔结合的三指机械手。
2 机构的运动分析与结构设计
通过对人手的分析发现,人手使用最频繁的3根手指为食指、拇指和中指,人手大部分的抓取等动作都是由这3根手指完成的,无名指和小指主要起辅助作用。要使该智能手能像人手一样完成多种多样的抓取任务,就要求智能手和手指能够像人手一样灵活,能够最大程度接近人手。但是考虑到设计和制造的复杂程度和成本问题,本设计在满足以上要求的条件下,要求智能手结构尽可能简单,因此设定手指数目为3个。
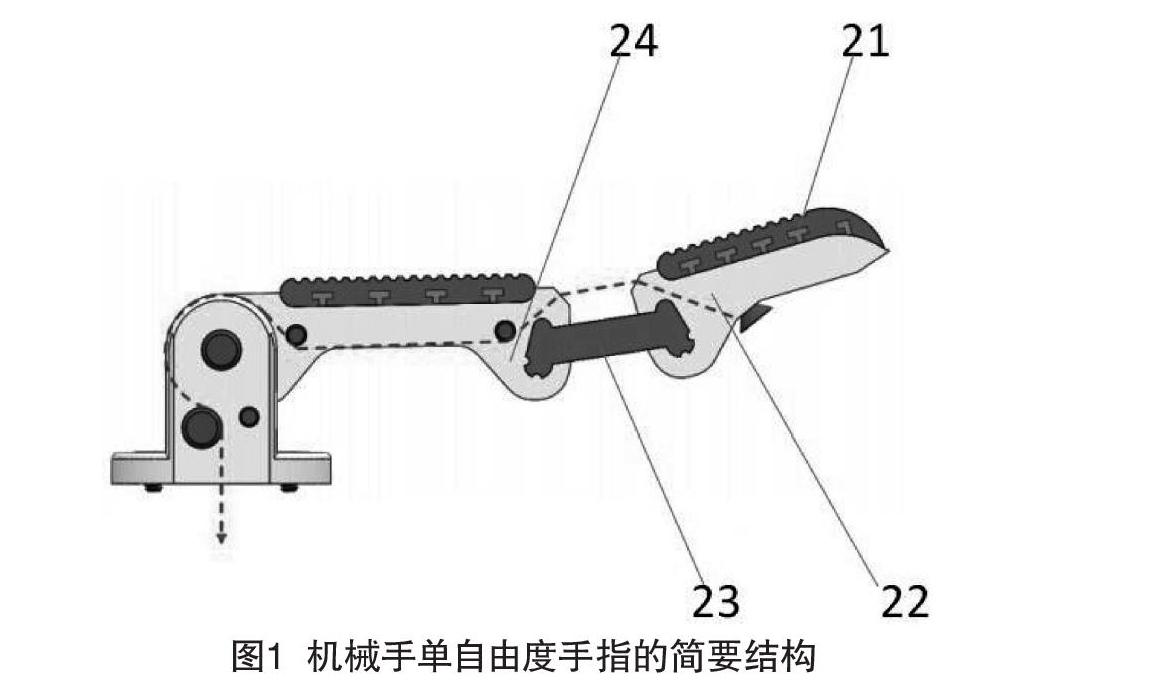
本机械手所要实现的基本动作为手指弯曲和伸展。因此,确定设计出单自由度手指的简要结构(见图1)。
所述手指部分包含近指节24、弹簧片23、远指节22、硅胶指垫21。手指部分通过销轴固定在手指底座3上,手指和手指底座间在销轴上安装扭簧,用于固定手指和手掌间角度和实现手指的回弹作用,利用尼龙绳穿于手掌与手指之间,实现驱动。
整体上,本文所设计的刚柔结合三指机械手,包括3根手指、3个手指底座、手掌、机架部分(见图2)。
所述手掌4用于安装3个手指底座,如图2位置3所示,其中,一个手指底座固定在手掌上,另外两个手指底座与底部转动机构固定,可在手掌上转动60°。
所述机架部分包含机架外壳1,机架上板5,机架下板7,一个转动舵机6,3个抓取舵机9。所述手掌4,机架上板5,机架下板7,底板8通过双通铜柱11和螺钉12固定,中间使用双通铜柱11支撑。
3根手指均可绕销轴旋转,通过设计使用扭簧定位和保证回弹,并且手指底座设计成一根固定,两根可以转动的结构,这样的设计可以方便实现机械手在面对不同物体时变换不同的抓取姿势,使机械手具有更好的形状自适应性和抓取效果,增大抓取范围。
手指转动通过尼龙绳驱动,驱动系统包括舵机9,滑轮10,尼龙绳。尼龙绳固定在滑轮上,向上穿过手掌和底座,按照一定的方式绕过手指,固定在手指远指节22上。通过舵机转动,带动固定在舵机上的滑轮转动,尼龙绳收缩使手指弯曲。采用尼龙绳驱动使用了欠驱动的驱动方式,减少了驱动器的数量,使机械手结构简单。
手指底座3转动由转动舵机6驱动,所述转动舵机固定在机架板上,舵机输出轴接齿轮,通过一个传动齿轮和一个转向齿轮最终和两个手指底座底部的转动机构相连,舵机转动可以驱动手指底座带动手指一起旋转,旋转角度为0°~60°,可以针对不同形状的物体,改变手指的排列方式,对物体有更好的抓取效果。
材料上,手指近指节和远指节指面上为硅胶指垫,采用硅胶灌注成型,表面为锯齿型结构,可以增大摩擦力。使用柔性硅胶指垫,使手指具有柔性,抓取较软或过硬物体时不易损伤物体和自身。手指模型通过3D打印形成,在硅胶指垫处预先留好指垫腔25,并且表面采用T型结构26固定指垫。将液体硅胶灌注到指垫腔,成型后去除外壳,形成硅胶指垫。
近指节和远指节采用弹簧片固定连接,采用弹簧片弹性铰链的优势在于,比传统铰链连接结构简单,易于实现,并且具有较好的回弹效果。
底板下方设计有燕尾槽,用于安装3指机械手,槽上有销轴孔,用于固定,采用这种方式设计,方便3指机械手的拆装,比螺纹连接更加方便,同时具有较好的稳定性。
3 控制系统设计
3.1 硬件电路设计
控制部分的整体结构由机械手动作控制旋钮、STM32單片机、驱动舵机运转的高压电源、舵机电路模块组成。控制按钮是进行调节的控制始端,通过外部中断触发中断服务程序,开始计算占空比并进行脉冲宽度调制(Pulse Width Modulation,PWM)输出,舵机接收到PWM波并且旋转到相应角度。硬件电路的作用在于接收来自外界的控制信号并驱动机电结构中的舵机。
主芯片采用STM32系列微處理器中的STM32F 103ZET6,STM32F103ZET6是STM32系列单片机的一种,芯片本身集成了模数转换与PWM输出等功能,可以直接进行数据的采集和一定占空比PWM的输出。
3.2 控制原理
STM32F103ZET6芯片集成了模数转换与PWM输出等功能,可以直接进行数据的采集和一定占空比PWM的输出。PWM是对脉冲宽度的控制,是一种周期一定而高低电平的占空比可以调制的方波信号[1]。不同的占空比产生的不同PWM波信号输出到舵机,使舵机转动到对应的角度。
STM32F103ZET6中,内置了多达4个可同步运行的标准定时器,分别为TIM2,TIM3,TIM4和TIM5。每个定时器都有一个16位的自动加载递加/递减计数器、一个16位的预分频器和4个独立的通道,每个通道都可用于输入捕获、输出比较、PWM和单脉冲模式输出,在大的封装配置中可多提供16个输入捕获、输出比较或PWM通道。
在本设备中,利用定时器3产生一路PWM波控制手指1和手指2的弯曲,由定时器2来产生另一路PWM波控制手指3的弯曲,再由定时器4输出一段PWM波控制手指2和手指3的相对角度。
4 结语
4.1 现有技术的缺点
现有技术采用关节数目多,结构复杂,在不便于制造维护的同时,又导致设备体积大、成本高,使产品在应用推广过程中受限。同时,产品控制算法大多较为复杂,须由专人维护使用。
4.2 本发明的特点
该设计在满足实现机械手多状态抓取、释放物体功能的同时,巧妙地采用尼龙绳牵引、舵机驱动的设计方案,具有欠驱动设计的特点,能够实现利用较少的驱动原件,实现较多自由度的控制。采用STM32F103ZET6芯片进行控制,控制方法简单、合理,方便操作。同时,使用3D打印技术和硅胶材料,在一定程度上缩小了成本,使设计产品较为轻便,灵活性高,有助于产品的推广。此外,该设计的适用范围极广,具有较高的市场价值。
[参考文献]
[1]洪俊峰,卜文强,张榕鑫,等.基于STM32 PWM的正弦信号发生器设计[J].合肥工业大学学报(自然科学版),2014(2):188-191,224.
Abstract:This paper designs a kind of three-fingered manipulator which can be used in actual production and life, and describes its inventive purpose, concrete structure and working principle. The paper improves the previous manipulator, uses the underactuated design of nylon rope traction, realizes the purpose of driving smaller driving elements with more degrees of freedom, and uses the silica gel material of 3D printing technology, which makes the whole equipment more portable and reduces the cost of the equipment. With STM32F103ZET6 MCU as the processing core, the servo is controlled by changing duty cycle with PWM output. On the premise of satisfying the requirements of grasping and releasing objects by manipulators, the characteristics of under-actuation, lightweight, low cost and wide application range are highlighted.
Key words:three-fingered manipulator; underdrive; 3D printing; PWM output; duty cycle
猜你喜欢
网络安全技术与应用(2022年5期)2022-07-26
现代消化及介入诊疗(2022年4期)2022-07-12
少年漫画(艺术创想)(2020年5期)2020-09-11
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
中国设备工程(2017年11期)2017-06-29
制造业自动化(2017年2期)2017-03-20
创造(2016年5期)2016-02-01
舰船科学技术(2015年8期)2015-02-27
