
尾流模拟火箭弹空中弹道对模拟尾流生成区域的影响*
2019-07-29 01:52袁志勇刘忠乐
国防科技大学学报 2019年4期
张 锐,袁志勇,刘忠乐,张 冲
(1. 海军工程大学 兵器工程学院, 湖北 武汉 430033; 2. 中国人民解放军92095部队, 浙江 台州 318000)
舰船在航行过程中由于螺旋桨空化效应以及吃水线渗入的大量气泡不断扩散,尾部会形成一条包含大量直径在50~1500 μm气泡的气幕带,即尾流[1]。从文献[2-3]可以得到目前在役舰船尾流的长度一般为1350~4000 m,宽度为30~42 m,厚度为10 m左右。尾流自导鱼雷应用尾流区域不同于非尾流区域的声、热、电、磁等物理特性进行跟踪制导,对行进中的舰船和潜艇构成很大威胁,现役尾流自导鱼雷采用的主要是基于舰船尾流气泡场声特性的主动声尾流自导系统[4],因此模拟与舰艇尾流几何尺度、气泡尺寸和气泡密度大致接近的气泡带对声尾流自导鱼雷进行诱骗毁伤具有迫切的军事需求。
尾流模拟火箭弹[5]在现役反鱼雷拦截弹的基础上进行改进设计,功能是在平行于舰艇航行方向距离舰艇2000~2500 m的距离生成长约2000 m、宽约20 m、厚约20 m的气泡带模拟舰艇尾流,以诱杀尾流自导鱼雷[6]。弹体由发动机、分离机构、前置脉冲发动机[7-8]、阻力板以及入水产生气泡带的爆索组成。脉冲发动机在火箭弹空中分离之前释放点火脉冲以进行弹道修正[9-10],从而使火箭弹在脉冲发动机推偏作用下完成空中转向,使其飞行方向近似与舰船航行方向平行,从而保证串列爆索入水发泡形成的模拟尾流大致平行于舰船真实尾流;分离机构在脉冲发动机进行弹体推偏修正方向后选取适当时机,将发动机和弹体分离[11-12];分离同时,阻力板打开增大阻力[13]并拉出弹仓中串列爆索,尾流模拟火箭弹成功诱骗的关键是保证弹仓中的爆索以“一”字形入水。
传统的弹道模型[14-15]已经很成熟,而空中爆索的应用较少,本文在传统的外弹道的基础上通过建立绳索模型将子弹串联起来[16-18],利用MATLAB对火箭弹以及爆索的空中弹道进行数值求解[19],着重分析分离时刻[20-21]、初始俯仰角、前置脉冲发动机以及风速对空中弹道以及模拟尾流生成区域的影响,得到火箭弹以及空中爆索空中弹道的一般规律,优选相关控制参数。
1 空中分离前火箭弹弹道模型的建立
尾流模拟火箭弹由脉冲发动机、弹仓(弹仓内部为串列爆索)、分离机构、发动机、稳定尾翼和阻力板组成,如图1所示。

图1 尾流模拟火箭弹结构示意图Fig.1 Schematic diagram of wake simulation rocket shell structure
尾流模拟火箭弹空中弹道涉及分离前弹道和分离后弹道,分离前弹道与初始射击诸元以及弹体的自身结构有关,分离后弹道与阻力板的阻力特性、连接绳的刚度、分离点以及其他外部环境有很大关系。因而在火箭弹弹道仿真模拟时,在六自由度弹道仿真的基础上应用控制变量法分析不同参数对弹道的影响[22]。
建模过程使用到的坐标系[23]有:地面坐标系o0-x0y0z0,弹道坐标系o-x′y′z′,弹体坐标系o-xyz,阻力板体坐标系od-xdydzd,阻力板弹道坐标系od-xdtydtzdt。
假设火箭弹在小攻角条件下飞行,发动机推力曲线已知,忽略非定常运动附加质量和质量惯性矩的影响,质心运动方程在o0-x0y0z0坐标系中建立,发射点为坐标原点;初始射击平面与x0o0y0平面重合。火箭弹空间受力及运动情况如图2所示,其中Fp为发动机推力,Ftp为脉冲发动机作用在火箭弹上的合外力,与弹体坐标系oz轴平行。α为攻角,β为侧滑角,Θ为弹道倾角,Ψ为弹道偏角,ωz、ωy为弹体绕oz、oy轴的转动角速度,参考文献[21],建立火箭弹六自由度运动微分方程。
各角度正方向确定:在空间弹道模型建立的时候用正负号表示方向,定义火箭弹速度矢量在纵平面上投影与在o0x0以下时α为正;定义导弹质心速度矢量在导弹纵平面右侧(从弹尾观测)时β为正;定义火箭弹速度矢量的指向在x0o0z0上方时Θ为正;沿o0y0俯视,火箭弹速度矢量水平面投影在o0x0左边时Ψ为正。
图2 火箭弹受力及运动平面图Fig.2 Plane figure of motion and forces of rocket shell
图2中,Mft、Mz为攻角α引起的位置阻尼力矩,位置俯仰力矩,v为火箭弹速度,Rx为弹体阻力沿ox方向分量,Ry为弹体阻力沿oy方向分量,G为火箭弹所受重力。
火箭弹所受空气动力和力矩为:
(1)
(2)
(3)
(4)
(5)
式(1)~(3)分别为火箭弹所受的阻力、升力和侧向力,式(4)、式(5)分别表示火箭弹所受的稳定力矩,定义α为正时俯仰力矩为正,β为正时偏航力矩为正。其中,Cx0为攻角α=0°时的阻力系数,K为与弹形相关的无量纲系数,C′y为升力系数对攻角α的导数,C′z为侧向力系数对侧滑角β的导数,m′z、m′y为稳定力矩系数对攻角α、侧滑角β的导数,ρ为空气密度,s为特征面积,l为全弹长度。
弹体空间运动方程为:
(6)
弹体绕轴转动方程为:
(7)
弹体质心运动方程为:
(8)
式(6)~(8)为弹体平面运动微分方程组。其中,m0为分离前火箭弹总质量,m为火箭弹总质量,ωx、ωy、ωz为火箭弹绕弹体坐标系ox、oy、oz轴的旋转角速度,ltp为脉冲发动机合外力作用于火箭弹质心时的力臂。
2 空中分离后发动机及阻力板弹道建模
2.1 阻力板及发动机受力分析
火箭弹空中分离后,阻力板和发动机侧向受力很小,可以忽略。分离后发动机尾端、阻力板与弹仓部分主要受气动阻力、升力、稳定力矩、重力以及连接绳拉力、拉力矩的作用[24-25],如图3所示。

图3 发动机尾端与阻力板受力图Fig.3 Force diagram of engine rear end and resistance plate
阻力板和发动机所受的气动力和力矩为:
(9)
(10)
(11)
其中:Sp为阻力板阻力特征面积,Cxp为阻力板的阻力系数,vp为阻力板质心速度大小,ez1为阻力板速度坐标系oz1轴的基矢量,升力垂直于基矢量ez1和速度矢量vp所确定的阻力平面,C′yp为阻力板升力系数导数,αp为阻力板的攻角,m′zp为阻力板稳定力矩系数导数,Lp为阻力板特征长度,稳定力矩方向由vp×ez1确定。
重力为:
G=-m1g
(12)
重力作用于质心处,不产生力矩,视为常量,m1为阻力板和发动机质量。
爆索出仓后,每个子弹由绳子连接两端,共10颗子弹,每一段绳子受力可以表示为:
(13)

2.2 发动机与阻力板运动微分方程组的建立
2.2.1 阻力板质心动力学方程
应用动量定理,阻力板质心动力学方程矢量形式为:
(14)
式中,Fp为合外力。
Fp=Rxp+Ryp+Gp+Tfi
(15)
阻力板和弹仓质心动力学方程标量形式为:
(16)
其中:Fpx1为切向力,与速度方向相反;Fpy1和Fpz1作为法向力和侧向力,改变阻力板质心运动方向。
2.2.2 阻力板绕轴转动动力学方程
将阻力板和弹仓转动惯量Mp在阻力板体坐标系od-xdydzd中分解,可得阻力板在体坐标系中绕轴转动动力学方程的标量形式:
(17)
其中:Jxp,Jyp,Jzp为阻力板绕体坐标系三个坐标轴的转动惯量;ωxp,ωyp,ωzp为阻力板和弹仓在体坐标系的转动角速度。
2.2.3 阻力板运动学方程
阻力板的质心运动学方程在地面坐标系中建立,绕心转动方程在体坐标系中建立,具体表达式如下。
绕心转动方程:
(18)
其中,θp,ψp,γp为阻力板在空中的俯仰角、偏航角和横滚角。
质心运动学方程:
(19)
其中,Θp、Ψp为阻力板弹道倾角和弹道偏角。
上述方程组中,阻力板攻角αp、侧滑角βp、弹道倾角Θp、弹道偏角Ψp、高低俯仰角θp以及偏航角ψp之间的联系方程可以根据坐标变换理论得到。
sinβp=sinΨpcosΨp-sinΨpcosψpcos(θp-Θp)
(20)
sinαp=sin(θp-Θp)cosψp/cosβp
(21)
综合方程(14)~(21),即为发动机和阻力板运动微分方程组。
3 空中分离后弹仓运动微分方程组的建立
作用在弹仓上的力和力矩计算公式以及运动微分方程的建立过程如图4所示。
图4 弹仓受力示意图Fig.4 Forces sketch map of magazine
作用在弹仓上的外力矩中需要添加赤道阻尼力矩Mzdd,该力矩阻碍弹仓的摆动。具体表达式为:
(22)
式中:Sd为弹仓阻力特征面积;Ld为弹仓特征长度;m′zd为赤道阻尼力矩系数导数;ωzd为弹仓摆动角速度矢量,其求解过程与阻力板求解过程类似,在此不再列出。
4 火箭弹外弹道仿真分析
4.1 质点弹道轨迹仿真分析
在前面火箭弹空中弹道模型建立的基础上进行仿真分析,火箭弹气动力参数通过fluent计算得到。选择火箭弹发射时的初始仰角θ0分别为15°、30°和45°,对火箭弹全程弹道进行仿真计算,空中运动轨迹如图5所示。

图5 不同发射仰角火箭弹外弹道轨迹Fig.5 Ballistic trajectory of rocket shell in different launch elevation
由图5可知,当初始发射仰角θ0=15° 时,火箭弹外弹道曲线平直、低矮,射高低于200 m ,射程则达到2784 m;当初始发射角为30°和45°时,火箭弹射程分别为4100 m和4700 m。为了使模拟尾流与舰船的距离在2000~2500 m,在下文仿真时取初始发射角为15°进行分析。
4.2 火箭弹空中分离弹道特性
爆索拉出展开前发动机和弹仓速度相同,在分离机构动作阶段,发动机与弹仓在短时间分离,空中弹道随之变成两个轨迹,串列爆索在空中拉直的过程中,每个发泡弹丸的轨迹会有所不同。分离时间为5.5 s时,火箭弹完成空中分离后发动机和弹仓空间轨迹如图6~7所示。
图6 火箭弹分离瞬间空中弹道Fig.6 Air trajectory of rocket separation instant

图7 无风、脉冲发动机不工作时火箭弹全程弹道Fig.7 Full range of rocket trajectory while windless and pulsed engine is not working
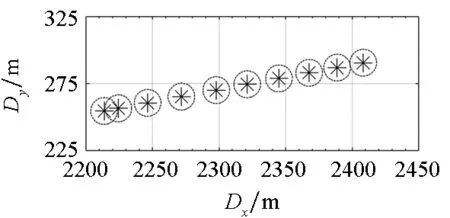
从图7中可以看出,爆索空中展开后由于受到的阻力增大,飞行距离迅速减小,最终10枚子弹基本保持“一”字形入水,如图8所示,Dx、Dy分别表示爆索发泡区域沿地面坐标系o0x0、o0y0方向位置。模拟尾流沿x0轴有效发泡区域大概在2100~2400 m之间,第1枚子弹和第2枚子弹的发泡区域有部分重叠,第7枚子弹到第10枚子弹的发泡区域基本相切,中间的子弹发泡区域稍有间距,但是可以近似认为气泡带满足设计要求。

图8 爆索发泡区域Fig.8 Generated bubble area of bomb cord
4.3 脉冲发动机运行状态对火箭弹弹道的影响
根据战术要求,火箭弹发射出管后要完成大约20°空中转向,对其外弹道进行仿真时主要考虑3个方面:①脉冲发动机喷管数量对火箭弹空中弹道的影响;②同一分离时刻,不同点火时间对空间弹道的影响;③同一点火时间,不同分离时刻对空间弹道的影响。
脉冲发动机的工作时间应该在火箭弹被动飞行阶段且在分离时间点以前,设置脉冲发动机工作时间为发射后第4~5 s,对不同初始发射角度下火箭弹全程弹道进行仿真分析。脉冲发动机推偏时间为1 s,单喷管平均推力为1005 N。图9是始发射角为15°时脉冲发动机不同数量喷管点火推偏情况下火箭弹空中弹道曲线。
从图9可以看出,脉冲发动机的运行状态对火箭弹的空中转向较为明显,单喷管工作时火箭弹空中转向角度大约为3.12°,三喷管同时工作的情况下当火箭弹空中转向角度约为11.676 7°时,脉冲发动机的冲量对火箭弹转向角度有较大影响,基本能满足空中转向要求。

图9 脉冲发动机喷管数量对弹道的影响Fig.9 Effect of number of pulsed engine nozzles on trajectory
4.4 同一分离时刻,不同推偏时间对模拟尾流生成区域的影响
火箭弹空中分离时刻设置为6.5 s,分析不同推偏时间对模拟尾流生成区域的影响。仿真结果如图10所示,推偏时间分别是2~3 s,3~4 s,4~5 s,5~6 s。

(a) 2~3 s

(b) 3~4 s

(c) 4~5 s

(d) 5~6 s图10 不同推偏时间对模拟尾流生成区域的影响Fig.10 Effect of different thrust time on simulated wake generated area
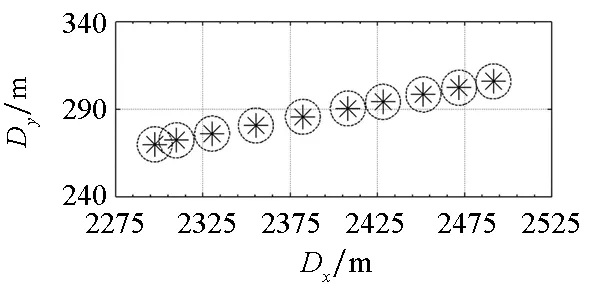
从图10可以得到,同一分离时刻不同推偏时间情况下火箭弹沿x0轴位移基本相同,沿y0轴距离却呈现先增大后减小的趋势。推偏时间为4~5 s时爆索落点沿y0轴展开的距离最大,即推偏的效果最明显,因此推偏时间取4~5 s为宜。火箭弹空中转向角度大致为16.699 2°,和设计指标有一定偏差,可以近似认为空中转向满足设计要求。爆索入水后发泡区域相对比较均匀,除了第1颗弹和第2颗弹发泡半径有所重合外其他弹丸发泡区域分布相对比较均匀,基本满足设计指标。
4.5 同一推偏时间,不同分离时刻对模拟尾流生成区域的影响
在分析分离时刻对模拟尾流生成区域的影响时,选择的推偏时间不宜过早,也不宜过晚。过早推偏,火箭弹还处于高速阶段,所受空气阻力比较大;过晚推偏,很可能会错过火箭弹空中弹道分离的最佳时机,因而在确定火箭弹空中分离时刻时设定推偏时间在3~4 s。仿真结果如图11所示,其分离时间分别是5 s、5.5 s、6 s、6.5 s、7 s、7.5 s。

(a) 5 s
(b) 5.5 s
(c) 6 s
(d) 6.5 s

(e) 7 s

(f) 7.5 s 图11 分离时刻对模拟尾流生成区域的影响Fig.11 Effect of separation time on simulated wake generated Area
由图11可以看出,不同分离时刻火箭弹爆索空中弹道的变化主要体现在沿x0轴位移上,随着分离时刻的推移,爆索落点沿x0轴的位移呈现先增大后减小的趋势,在2500 m左右,但是火箭弹空中转向角度在分离时刻为5.5 s时基本是最大的,大约为16.7°。过晚分离时,火箭弹处于减速下降阶段,推偏角度较小且不利于爆索空中展开;过早分离时,爆索展开后在空中时间较长,爆索空中飞行时间较长,也比较容易受到外部环境的干扰。
因而通过仿真分析优选火箭弹初始发射角度为15°,推偏时间为4~5 s,分离时刻为5.5 s。
5 结论
本文分析了尾流模拟火箭弹射击俯仰角以及空中分离时刻、脉冲发动机的状态对模拟尾流生成区域的影响,得到以下结论:
1)在射击参数确定的情况下,尾流模拟火箭弹能够按照预定的轨迹飞行并完成空中开伞分离,且模拟尾流的生成区域近似能够达到设计要求;
2)火箭弹飞行过程中应该先完成转向,再开伞分离,且转向和分离应该在火箭弹飞行至弹道最高点之前完成,以保证火箭弹在末端无控飞行过程中稳定且爆索能够充分拉直;
3)未考虑外部环境对模拟尾流生成区域的影响,后续可以针对风载荷对模拟尾流生成区域的影响进行探索性研究。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
新技术新工艺(2022年3期)2022-04-02
爆炸与冲击(2022年2期)2022-03-17
舰船电子工程(2021年6期)2021-06-28
雷达学报(2017年6期)2017-03-26
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29
舰船科学技术(2015年8期)2015-02-27
现代防御技术(2014年5期)2014-02-28
