
高速动车组牵引制动仿真系统的自动控制状态转换图
2019-07-29 06:01王皓,陆阳,高翔
铁路计算机应用 2019年7期
王 皓,陆 阳,高 翔
(中国铁道科学研究院集团有限公司 机车车辆研究所,北京 100081)
高速动车组与传统铁路运输不同,其动力分散,且整列车辆在运营过程中不可拆散重组的运营特性,不同于传统的铁路机车车辆。借助动车组仿真平台,可以进一步研究相关的运营特性,为不断提高动车组运营效率提供重要参考。铁路机车车辆及动车组的仿真平台研究在国外已经展开。比较成熟的仿真平台有北美的RAILSIM、欧洲的Trainstar、日本的UTRAS[1]、俄罗斯的EMUTTCS[2]。它们各有特色,结合我国的高速铁路建设特点,以及运营经验,需要开发符合国情需求的高速动车组仿真平台[3]。
《列车牵引计算规程》[4](简称:《规程》)是针对中国铁路运输实际情况制定的计算标准。基于该《规程》,开发了专门针对高速动车组的牵引制动仿真系统(简称:动车组仿真系统),以便充分利用先进的计算机技术为我国高速动车组的运用和研究提供重要参考数据。
铁路线路的设计和建设都有规定的限速,因此仿真系统中必须有防止动车组超过轨道限速的功能[5]。基本的仿真系统功能只要能使固定的加减速控制动车组达到区间限速并稳定运行即可[6],复杂的仿真系统,需要进一步提供方便直观的调整控制动车组运行过程的细节[7-8],例如:加速、制动手柄的位置,定速和紧急制动(EB、UB)的控制,以及运行状态的详细记录等。
简单的自动控制可以根据动车组追踪间隔,采用提前制动的方式进行控制[9],或者基于ATP系统的减速曲线来反算减速控制操作[10]。对于仿真的中间过程,可以将其设计为启动牵引、惰行-牵引、惰行-制动3个情况[11]。但是,仿真过程中,存在着起车、限速、过分相、不同坡度下实现定速或加减速操作等情况,还可能需要从不同公里标启动并运行到指定位置,来模拟应急情况、区段分析等复杂情况。这并不是一个简单的、线性的控制状态转换过程。所以,我们的仿真系统中,需要一个在各种情况下,都能自动控制动车组沿着整条线路或局部线路高效运行的方法。
本文聚焦于仿真系统结构中的自动驾驶系统,提出其核心算法—控制状态转换图,即通过定义动车组的若干个控制状态,以及在这些状态之间的转换条件,来自动生成当前控制状态下动车组模拟司机应该采用的动车组控制手柄的级位。而仿真系统通过读取手柄级位(实际系统在这里不区分是真人设置的,还是自动驾驶系统设置的手柄级位),换算成牵引制动系统产生的牵引力或制动力,就可以模拟动车组在轨道上的运行状态,完成仿真过程。
1 高速动车组仿真系统状态转换图设计
1.1 状态转换图设计
动车组控制手柄的级位,既可以由仿真软件的用户来直接指定,也可以使用自动驾驶系统来模拟司机的操作来指定。当使用自动驾驶的时候,自动驾驶系统需要知道动车组的运行状态和控制目标,并结合模拟司机的操作特性才能决定当前的控车手柄的最佳级位。因此,根据动车组的运行情况定义了动车组的控制状态,以及这些状态之间的转换条件,如图 1所示。
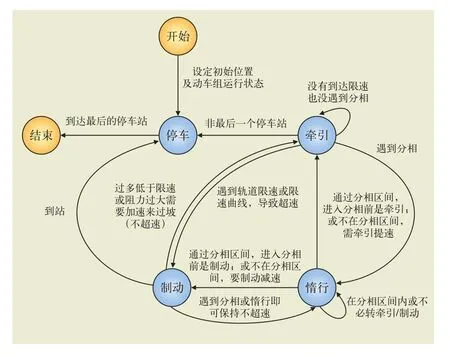
图 1 动车组控制状态转换图
1.1.1 开始、停车和结束
开始、停车和结束3个状态,对应仿真过程的入口、重要节点和出口。
开始状态。仿真系统需要根据仿真项目的配置初始化自动驾驶的参数,例如:根据项目配置参数,确定动车组在轨道线路上初始位置、停车站位置,线路上哪些分相区间是有效的,还要确定仿真最终结束的位置。
停车状态。一般是动车组在仿真开始的起点、轨道上的停车车站,或者是区间仿真时对应的轨道上的起点和终点的状态。在这个状态下,虽然车速为0,但是仿真过程并没有结束。
结束状态。意味着一次仿真过程结束,所有动车组运行的状态数据记录完毕,准备进入下一次仿真或进行数据处理。自动驾驶时,在这个状态下,车速为0,仿真过程结束。手动驾驶的时候,结束状态的车速可以不为0。
1.1.2 牵引和制动
牵引和制动,是动车组驾驶过程中最常见的两种状态。
在牵引状态下,动车组的当前速度远小于轨道限速和“公里标-限速”曲线规定的限速,可以按照司机牵引特性参数放心的牵引加速。当动车组当前速度很接近限速(且没有超过限速)的时候,牵引手柄就不能全力加速,而要根据速度差,进行微调。既要实现加速到目标速度,又要防止超速。
在制动状态下,动车组要采用一定的制动策略,来防止超速,或制止已经出现的超速情况。一般要把车速降低到对应的轨道限速以下,或按照司机驾驶的减速特性进行减速来保证精准到站停车。如果出现下坡段过分相存在因为惰行而超速的情况,则必须模拟司机的操作来提前减速,以防超速。通常,车速非常接近“公里标-限速”曲线的时候,可以放心地按照司机制动特性参数进行制动。当车速超过限速比较多的时候,制动就需要考虑全力常规制动、EB或UB了。
总体来说,牵引和制动这两个状态之间的转移,主要取决于当前车速与目标限速之间的差距。模拟司机的操作特性控车,主要是在这两个状态下。当然,还要给目标速度增加一个调节的范围,防止过于频繁地在制动和牵引状态之间进行切换。
1.2 惰行状态
有了前面的几个状态之后,还根据动车组实际情况,添加了特殊的惰行状态。有2种情况动车组会进入惰行状态,因此要分别记录与其相关的参数。
1.2.1 被迫惰行
当动车组经过分相区间的时候(实际上从分相的预告位置开始,到分相结束的标记位置之后动车组重新从弓网获取电能的位置),动车组无法从受电弓获取电能,被迫处于惰行状态。因此,进入分相区间之前,要记录牵引/制动的状态,在离开分相区间的时候要恢复相应的状态(进入前是牵引,离开时恢复牵引;进入前是制动,离开时恢复制动)。
1.2.2 主动惰行
主动产生的惰行,是自动控制系统判断动车组的速度非常接近轨道限速或“公里标-限速”曲线定义的限速时,为了防止频繁加减速而使用的策略。车速非常接近限速的时候,牵引容易导致超速,而制动则浪费动能。如果惰行可以维持车速在合理范围内,且不超过限速,那么,自动控制系统可以选择主动进入惰行状态,防止频繁地加减速切换。
2 在仿真中应用的效果
2.1 基本仿真过程
该高速动车组仿真系统中,动车组的运行状态采用等时间间隔的递推过程(从第i个状态递推到第i+1个状态)来计算,其具体运算可以用如下公式组进行:
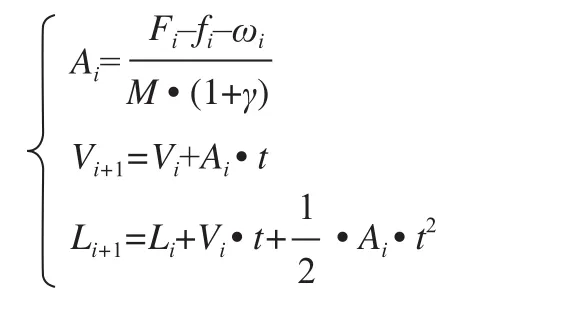
其中, Fi为动车组控制手柄级位换算的牵引/制动力;fi为阻力,来自经验公式fi=a+bVi+CV2i, a、b、c为通过实验获得的经验常数;ωi为轨道阻力,是动车组在公里标Li处的坡道、曲线、桥梁隧道等产生的阻力合力;M为动车组质量;γ为动车组回转质量系数;t为两个运行状态之间的时间间隔。这些参数每个动车组的车型都不完全相同,一般可以从《规程》中获取。
2.2 模拟司机操作特性
在以上状态图中的每个状态(除了开始和结束状态),都有自己的动车组手柄控制策略。模拟司机加减速的策略是在仿真系统的项目配置模块输入的。司机可以在不同的速度下,有不同的加减速控制方案,既可以对应有级位的手柄位置,又可以对应无级变速的手柄位置。当然司机的操作策略既可以是根据不同的速度使用不同的手柄挡位,也可以是简单的使用最高挡位进行加速或减速。
在惰行状态,相当于动车组控制手柄产生的牵引/制动力为0。在停车状态时,仿真系统会加上停车制动,让车速保持为0,来防止动车组因为轨道坡度等产生倒车、溜车的情况。
2.3 仿真结果
利用状态转换图产生的动车组自动控制过程,很好的模拟了动车组驾驶员操控行为,从而能够控制动车组沿着轨道线路,从始发站一直运行到终点站。控制状态切换产生的加减速操作可以在仿真结果中看到,如图 2所示, 上方红色的包络线为轨道限速,两个车站之间的曲线为动车组的车速,横坐标为公里标,纵坐标为车速。动车组加减速状态对应控制手柄的状态,用不同颜色表示,这些颜色反映了各控制状态工作的区间和转换的次序。
3 结束语
本文介绍了模拟驾驶员操作动车组功能的核心模块—控制状态转换图—的设计,该设计方案用于铁科院机辆所开发的高速动车组仿真系统成功模拟了动车组司机的手柄操作行为。根据这个模拟司机的操作,仿真软件能够整条轨道线路上模拟司机驾驶的行为。根据手柄的级位记录数据,仿真软件能够很好的区分牵引、制动、惰行等状态,于是将这几个状态对应到消耗电能状态、电制动发电状态等,我们就可以很方便的统计出区间内的各种能耗数据,如图 3所示。程序还很容易就能统计出牵引时间、制动时间等时间参数,为动车组的实际应用提供重要参考。
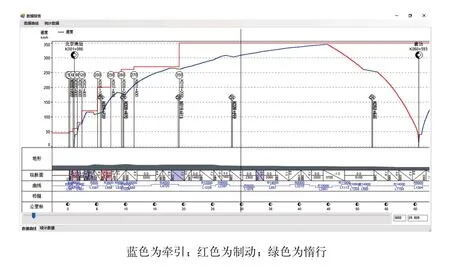
图 2 动车组牵引制动仿真系统运行结果

图 3 仿真软件给出的能耗分析表
仿真测试结果,与实际运行情况非常吻合,证明了基于该状态转换图的自动驾驶功能,能够模拟动车组驾驶员控制手柄的操作,并完成控制动车组沿着轨道线路正常行驶的完整仿真过程。

猜你喜欢
农机质量与监督(2021年5期)2021-07-02
铁道通信信号(2020年4期)2020-09-21
海峡姐妹(2020年2期)2020-03-03
伙伴(2020年1期)2020-02-14
电子制作(2018年11期)2018-08-04
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
山东工业技术(2016年15期)2016-12-01
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
