NURBS曲线在罗茨泵转子型线设计中的应用
2019-07-26 02:03刘振超何雪明黄海楠
食品与机械 2019年7期
刘振超 何雪明 黄海楠
(1.江南大学江苏省食品先进制造装备技术重点实验室,江苏 无锡 214122;2.三一重机有限公司,江苏 苏州 215300)
罗茨泵是一种无内压缩的旋转变容积式泵,在食品、化工、医药等行业中的真空蒸馏、浓缩、干燥等工艺过程中得到广泛应用[1]。其核心零部件为内部一对沿相反方向同步旋转的转子。罗茨泵在工作过程中借助于转子转动过程中与转子腔形成的多个基元容积实现抽气功能。转子截面形状即转子型线,其优劣直接决定了整个罗茨泵设备的工作性能。
Tsay等[2]提出了叶峰曲线为单圆弧、叶谷曲线为圆弧共轭曲线的罗茨风机转子型线,并建立了转子型线的方程。Hsieh等[3]尝试用渐开线设计罗茨风机的转子,并通过试验证明了使用渐开线转子型线的罗茨风机拥有更高的容积利用效率。Tong等[4]根据偏差函数推导了罗茨泵的一般流量公式,并提出了一种根据给定流量方程设计罗茨泵转子型线的方式。Hsieh等[5]提出了用可变摆线比的摆线设计罗茨泵转子型线的设计方法,并以基于三次、五次、七次的多项式和正弦函数的摆线比的摆线设计转子型线。Cai等[6]提出了一种从叶峰曲线到叶谷曲线分别为圆弧、偏心圆弧、摆线、圆弧组成的罗茨泵转子型线。
目前罗茨泵转子型线上应用比较广泛的是圆弧、摆线、渐开线。用此类曲线设计转子型线时,当叶峰曲线为由多段曲线构成时,设计效率低下;转子型线的线型一旦选定,在有限空间内修改较繁琐。而NURBS曲线(Non-Uniform Rational B-Splines)具有能够表达常规二次曲线的特性,且NURBS曲线具有二次曲线不具备的局部修改性。本研究拟将NURBS曲线运用到罗茨泵转子型线的设计中,旨在实现罗茨泵转子型线表达方式的统一,并利用其局部修改性设计出性能更加优异的转子型线。
1 罗茨泵转子型线设计原理

通过确定转子齿数Z、中心距H和齿顶高Ra可以确定叶峰曲线和叶谷曲线的设计范围。在设计型线时为了保证转子与转子之间每一个啮合点的间隙均匀且保持恒定,叶峰曲线A1C1和叶谷曲线C1E1都是共轭的,所以叶谷曲线C1E1通过包络条件可计算求得,故只设计叶峰曲线A1C1。

图1 罗茨泵转子型线设计图Figure 1 Rotor profile design of roots pump
1.1 转子型线设计的坐标系及坐标转换
在叶峰曲线设计完后,通过包络条件式求叶谷曲线,必须建立如图2所示的坐标系。其中包含了两对坐标系,分别为:① 固结在罗茨泵泵体上的左侧转子的静坐标系O1X1Y1和右侧转子的静坐标系O2X2Y2;② 固结在转子上的左侧转子的动坐标系O1x1y1和右侧转子的动坐标系O2x2y2。左侧转子的动、静坐标系和右侧转子的动、静坐标系分别拥有共同的原点O1、O2,O1、O2分别处于两个转子的旋转中心上,区别在于静坐标系O1X1Y1和O2X2Y2是固结在泵体上,不随着转子的转动而发生任何位置变化,而动坐标系O1x1y1和O2x2y2是固结在转子上,随着转子的转动发生相应角度的转动。左侧转子逆时针转动,右侧转子顺时针转动。需进一步说明的是转子型线的设计为二维问题,故本设计方法中未涉及到Z轴。
根据转子的啮合原理可以得到以下不同坐标系之间的表达关系[7]:
(1)在左侧转子静坐标系O1X1Y1中表达左侧转子动坐标系O1x1y1中的元素:
(1)
(2)在右侧转子静坐标系O2X2Y2中表达右侧转子动坐标系O2x2y2中的元素:

φ表示左侧转子和右侧转子的转角;ω表示转子旋转的角速度图2 罗茨泵转子坐标关系Figure 2 Rotor coordinates of roots pump
(2)
(3)在左侧转子静坐标系O1X1Y1中表达右侧转子静坐标系O2X2Y2中的元素:
(3)
(4)在左侧转子动坐标系O1x1y1中表达右侧转子动坐标系O2x2y2中的元素:
(4)
(5)在右侧转子动坐标系O2x2y2中表达左侧转子动坐标系O1x1y1中的元素:
(5)
左侧转子的叶峰曲线的参数方程为:
(6)
式中:
ts≤t≤te(ts,te分别为叶峰曲线段系数t的起始值和终止值)。
将式(6)代入式(4)中,可以得到叶峰曲线段在对应的右侧转子上的叶谷曲线段的方程为:
(7)
根据包络条件可以求得φ关于曲线参数t的表达式:
(8)
式(8)称为包络条件式。通过包络条件式得到φ后,再代入式(5)中即可得到右侧转子的叶谷曲线方程。
此时求得的叶谷曲线为右侧转子的叶谷曲线,而最终需要得到的是左侧转子的叶谷曲线,故还需将右侧转子的叶谷曲线进一步换算成左侧转子的叶谷曲线。若将动坐标系O1x1y1,O2x2y2重叠,将左侧转子的叶峰曲线和右侧转子的叶谷曲线统一到同一个坐标系中表达可得如图3所示的图形,此时右侧转子的叶谷曲线和左侧转子的叶谷曲线为关于直线y=x×tanγ对称的曲线,故可以通过镜像矩阵M1得到左侧转子的叶谷方程:
(9)
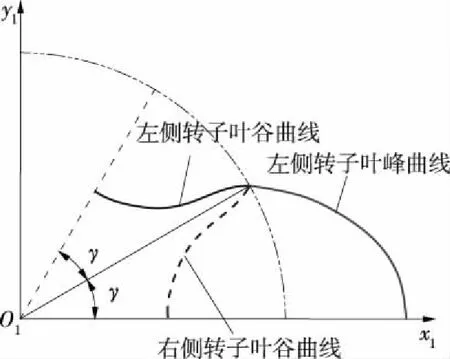
图3 左侧转子和右侧转子的叶谷曲线关系图Figure 3 Valley curves of left and right rotors
故可以在设计完转子的叶峰曲线方程的情况下,通过计算得到转子叶谷曲线的方程。
1.2 叶峰曲线合理设计区域的推导
在设计罗茨泵转子型线时,第一步为确定叶峰曲线,为了避免叶峰曲线数据一开始就设计不合理,直到该段曲线设计完才发现转子型线的错误,导致转子型线的设计效率降低。故本研究针对转子的叶峰曲线的设计区域进行框定,以指导转子型线的设计参数选取,提高设计效率。为了设计方便,将转子叶峰曲线都设计在第一象限和坐标轴上,转子的叶峰曲线的起点都设计在O1x1轴上。
如图4所示,由于转子叶峰曲线自身位置的布局特点,叶峰曲线必须处于节圆弧O1A′C右侧、齿顶圆弧O1AF左侧、线段A′A上方、线段CF下方。得出叶峰曲线的基本设计区域:
(1)叶峰曲线处于O1A′C右侧:
(10)
(2)叶峰曲线处于O1AF左侧:
(11)
(3)叶峰曲线处于线段A′A上方:
y1≥0。
(12)
(4)叶峰曲线处于线段CF下方:
(13)
转子叶峰曲线和对应的节圆段存在一种映射关系,理论上叶峰曲线映射到节圆弧段O1A′C上,恰好得到完整的节圆弧段,若映射得到的曲线出现重叠,则会产生封闭容积,为了避免此类情况,并将情况推至极限,则叶峰曲线映射得到的曲线只为一点,而考虑叶峰曲线在A点的连续性要求,故映射得到的点只能是A′点,满足情况的叶峰曲线如图4中的销齿圆弧A′AG,即叶峰曲线设计的下边界。

图4 转子型线设计的基本区域的确定Figure 4 Determination of basic area for rotor profile design
下边界销齿圆弧A′AG的数学表达式如下:
(x-R)2+y2≥(Ra-R)2,x∈[R,Ra]。
(14)
同时转子的封闭性限定了转子的叶峰曲线和叶谷曲线必然是首尾相接,故叶峰曲线必然过C点;转子的连续性限定叶峰曲线为多段时,各曲线之间必须至少保证相切连续。叶峰曲线若完全采用销齿圆弧,叶峰曲线的终点不能到达设计终点C点,故在式(12)限定的叶峰曲线合理设计区域的下边界的基础上可以进一步缩小设计区域的左边界,叶峰曲线至少由两段曲线组成,如图4所示,保证第一段曲线为销齿圆弧最长为A′AB,第一段曲线外的曲线为直线段BC。
转子型线的合理设计区域的左边界ABC,数学表达式为:
(15)
式中:
通过以上的约束条件便得到叶峰曲线的合理设计范围,如图5中粗虚线标出的区域所示,图5中同时标出了圆弧型转子型线、摆线型转子型线、渐开线型转子型线的叶峰曲线和该合理设计范围的关系。从图5可知,几种典型的转子型线的叶峰曲线均设计在合理设计区域内。本研究提出的叶峰曲线的合理设计区域虽不能保证设计在其内部的齿廓都是合格的,但能保证未设计在合理设计范围区域内的转子型线一定为不合格的。

图5 典型转子型线与合理设计区域的关系Figure 5 The relationship between typical rotor profile and reasonable design area
2 NURBS曲线设计转子型线的方法
2.1 包络条件求解
一段k次NURBS曲线的函数定义为[8]:
(16)
式中:
u——NURBS曲线中的参数;
k——曲线次数;
Pi——控制点,控制点的个数为n+1;
wi——控制点的权因子,决定了控制点偏离曲线的程度,控制点的个数为n+1,所以wi>0;
Ni,k(u)——定义在非周期且非均匀节点矢量U={a,…,a,uk+1,…,um-p-1,b,…,b}上的k次B样条基函数,节点矢量U中的元素称为节点,节点矢量中节点的个数为m+1,而参数m满足m=n+k+1。
NURBS曲线在进行罗茨泵转子型线设计中使用相对容易,给定了NURBS曲线的次数k、控制点Pi、控制点对应的权因子wi后,左侧转子的叶峰曲线方程可表达为:
(17)
式中:
0≤u≤1。
将式(15)代入式(6)中可以得到NURBS曲线的包络条件式:
φ=
(18)
式中:
将式(17)设计的NURBS曲线的叶峰转子型线方程和NURBS曲线设计转子型线时的包络条件式(18)代入式(4)可以得到右侧转子上的叶谷曲线方程。式(18)中涉及到NURBS曲线的求导,与传统圆锥曲线的求导是有区别的。
2.2 NURBS导数的推导
(19)
故NURBS曲线的一阶导数可以表达为:
(20)
式(20)中在求解A(u)和K(u)的一阶导数时,实质上只需对其公式内部的基函数求解:
(21)
基函数的求导类似于基函数的求解,为一个递推公式,需要从低阶到高阶逐层计算:
(22)
由此便可计算出NURBS曲线的一阶导数的求导。
3 基于NURBS曲线的转子型线设计
在常用的罗茨泵转子型线中,渐开线型转子型线的罗茨泵在面积利用系数上要高于单圆弧型转子型线,故理论抽气速率也是渐开线型的要高。本研究基于NURBS曲线的局部修改性和前文提出的叶峰曲线合理设计区域,在渐开线型转子型线的基础上,对转子型线进行改进设计,以期获得面积利用系数更高的罗茨泵转子型线。面积利用系数能直接反映罗茨泵的抽气速率。根据罗茨泵转子的面积利用系数λ的定义,得到面积利用系数的公式:
(23)
式中:

S——罗茨泵转子的横截面面积。
NURBS曲线设计转子型线流程,首先确定了转子的齿顶高、中心距、转子齿数。再利用NURBS曲线设计叶峰曲线A1C1,根据叶峰曲线A1C1的数据计算叶谷曲线C1E1,获得整条转子型线数据,若满足要求,则输出型线数据,若不符合设计要求,则需要修改设计参数,重新计算。
3.1 渐开线型转子型线的复现
由于NURBS曲线对渐开线无法完美表达,故只能通过调整次数与控制点数对NURBS曲线进行拟合,使其与渐开线的误差保证在允许误差之内。因此NURBS曲线设计的渐开线转子型线在叶峰曲线上存在一定的误差,使得通过计算得到的叶谷曲线也存在误差,既而在用NURBS曲线复现渐开线型转子型线后,有必要对叶峰曲线和叶谷曲线进行误差分析。
对限定区域下渐开线转子型线的叶峰曲线用NURBS曲线进行拟合,采用四次NURBS曲线,并通过5个控制点对曲线进行控制,如图6所示,数据见表1。渐开线转子型线中销齿圆弧部分可以使用NURBS曲线表达[9],误差如表2所示,复现销齿圆弧部分可以做到无误差;拟合的渐开线转子型线渐开线部分的平均误差为8.332×10-2μm,最大误差为1.773×10-1μm;通过拟合的NURBS曲线计算得到的叶谷曲线的数据和原曲线的数据经过比对,平均误差为1.041×10-1μm,最大误差为3.509×10-1μm。可以看出,通过NURBS曲线设计的渐开线型转子型线的叶峰曲线和叶谷曲线的误差均低于抛光的加工精度,该误差在合理误差范围内,实现了用NURBS曲线对渐开线型转子型线的复现。

图6 叶峰曲线控制点图Figure 6 Control point chart of leaf peak curve

表1 渐开线型转子型线叶峰曲线的设计参数对比Table 1 Comparison ofdesign parameters of involute rotor profile blade peak curve mm

表2 曲线设计的误差分析Table 2 Erroranalysis of curve design μm
3.2 基于NURBS曲线的转子型线改进设计


对第2段叶峰曲线段采用NURBS曲线的设计策略为:NURBS曲线次数采用了三次,并由4控制点进行控制,针对第1段销齿圆弧的使用长度,第2段曲线通过一维搜索的方法对第2段NURBS曲线的中间两个控制点对应的权因子进行调控,从而获得每组中面积利用系数最高的权因子组合。
实际设计发现第3组试验之后的组别无论如何调整第2段的NURBS曲线,都会出现根切的现象,如图8所示。故只对前3组试验的结果进行了总结,得到表3的试验结果。通过对表中的数据可以看出,改进的NURBS曲线型转子型线中面积利用系数最高的为第2组,高出渐开线转子型线0.53%,高出单圆弧型转子型线1.45%。其转子型线叶峰曲线数据如表4所示,转子型线如图9所示。

图7 渐开线转子叶峰曲线图Figure 7 Peak curve of involute rotor blade
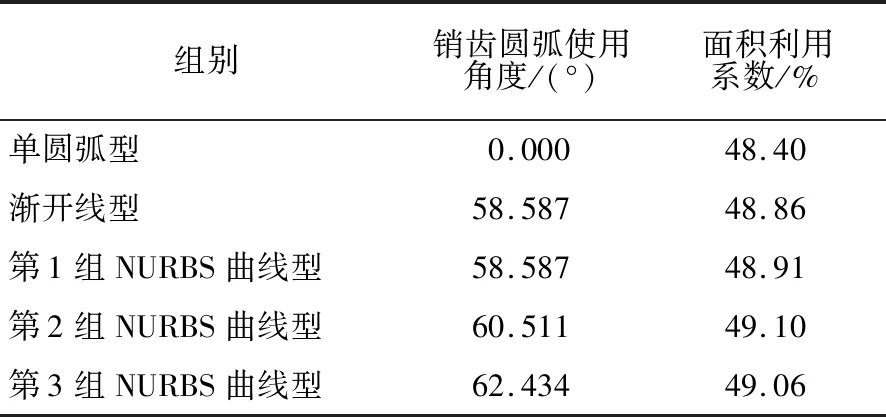
表3 改进的转子型线性能参数对比Table 3 Comparisons of linear performance parameters of improving rotor shapes
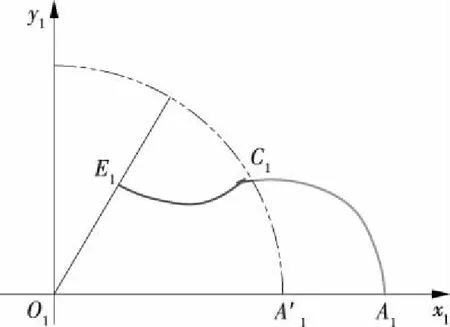
图8 转子型线的根切图Figure 8 Undercut of rotor profile
4 结论
(1)设计罗茨泵转子型线叶峰曲线合理区域,便于指导转子型线参数选取,对转子型线的改进设计开发具备一定的指导作用,提高设计效率。
(2)针对渐开线型转子型线,用一整段NURBS曲线表达叶峰曲线,由控制点和权因子决定,得到了误差最大为1.041×10-1μm的型线,验证了用NURBS进行型线设计的可行性。增加了罗茨泵转子型线设计的曲线类型。结合叶峰曲线合理设计区域,利用NURBS曲线局部调整性对型线进行优化,最终得到了优化后的型线,型线的面积利用系数得到了提高,提高了罗茨泵性能。
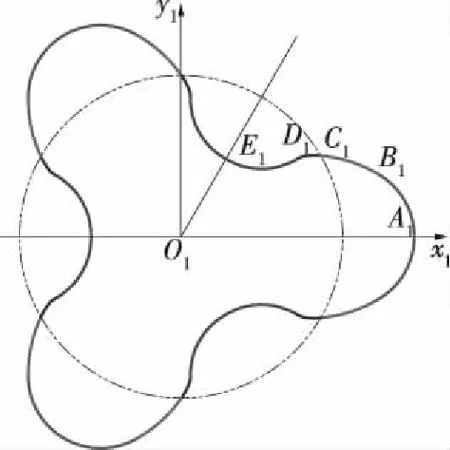
图9 改进的NURBS型转子型线Figure 9 Improved NURBS rotor profile
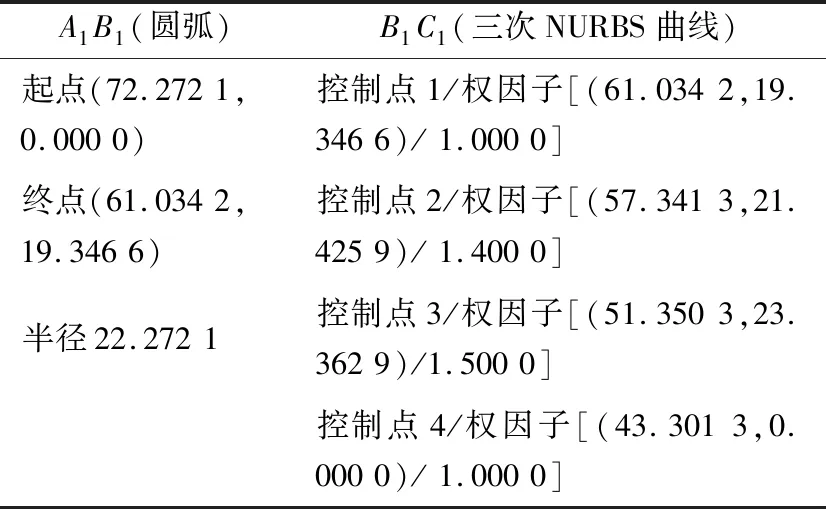
表4 改进的NURBS型转子型线叶峰曲线数据Table 4 Improved NURBS rotor profile peak curve data mm
(3)结合NURBS曲线设计转子型线,优势在于NURBS曲线的便捷的局部调整性,研究中只通过修改权因子的方式调控曲线,为了最大化利用NURBS曲线的形状调整工具,今后应同时结合调整控制点的方法设计转子型线。
猜你喜欢
机械研究与应用(2022年2期)2022-05-20
化工设计通讯(2021年10期)2021-01-07
重型机械(2020年3期)2020-08-24
装备制造技术(2020年12期)2020-05-22
制造技术与机床(2019年10期)2019-10-26
看世界(2019年17期)2019-08-26
船海工程(2018年5期)2018-11-01
制造技术与机床(2017年11期)2017-12-18
制造技术与机床(2015年10期)2015-04-09
汽车与新动力(2014年3期)2014-02-27