
铀矿岩心β-γ自动编录系统设计与研制
2019-07-24 01:09:28段金松李婷王玮麻金龙武旭东张兆山
铀矿地质 2019年4期
段金松,李婷,王玮,麻金龙,武旭东,张兆山
(核工业北京地质研究院,仪器开发研究所 北京 100029)
铀矿岩心作为铀矿床深部地质研究的直接对象,记录着地质体的垂向变化信息,对评价钻探成果具有重要指导作用。在铀镭平衡偏铀地区,仅测量岩心γ放射性活度,可能导致漏矿。为反映矿区含铀的真实情况,有必要进行β、γ测量[1-3]。岩心编录过程大致分为前期准备、现场编录和检查、后期整理3个阶段[4],传统的现场编录方式为采用便携式编录仪进行手动 “插屏”式的二次测量模式,该方法由人工值守操作,数据采集过程易引入人为不可控因素,且工作效率低。为弥补传统编录方式的不足,设计团队结合当前电气自动化控制技术及探测器信号处理能力设计了一款应用于勘探现场的铀矿岩心β-γ自动编录系统,可实现岩心的快速、准确扫描测量,有助于提高编录效率和精确度,并逐步替代人工编录工作。
1 系统设计
1.1 系统整体设计
铀矿岩心β-γ自动编录系统整体设计结构 (图1),主要包括机械传动系统 (图右侧虚框内)、数字化探测器及计算机端系统管理软件3部分。其中,机械传动系统由主控制器、伺服电机驱动器、伺服电机、三轴直线滑台、电源系统等组成,主控制器通过发送脉冲信号调整伺服电机三相励磁绕阻通过电流大小,进而改变转子转动角度,带动滑轨并实现对目标单元的运动控制;数字化探测器采用大面积闪烁体及高精度信号甄别技术研制,双探测器通过搭载到机械传动系统实现完整岩心β和γ信号的分别测量,其与主控制器之间采用CAN总线通讯技术完成数据交互;系统管理软件采用模块化理念设计,实现整机参数设置,运动平台精确位移控制,测量数据采集存储等功能。系统采用48V16Ah的锂离子电池为整个系统提供安全稳定的供电电源。

图1 铀矿岩心β-γ自动编录系统整体设计图Fig.1 Integrated design of uranium core β-γ automatic scan and record system
1.2 机械传动系统设计
为保证岩心β、γ放射性强度测量精度和准确性,机械传动系统作为整个系统平台的基础,必须具备运动精度控制准确,启停迅速平稳,自适应速度调节的能力,同时具有灵活性好,响应速度快、运动精度高的优点[5]。
1.2.1 硬件结构
机械传动系统以三轴滑台作为支撑,分别通过x、y及z轴直线滑台配合伺服电机进行探测器的单方向位移控制或三维空间内的联动调控 (图2)。主控制器通过驱动器实现三轴电机运动管理,伺服电机通过编码器将实时位置信息反馈给驱动器,完成位置、速度和力矩的闭环控制[6]。在满足负载、转矩、转动惯量等情况下,选用大功率直流伺服电机驱动同步带主动轮转动 (x、y轴),或通过联轴器驱动滚珠丝杠转动(z轴),进而推动直线导轨上滑块前后运动。导轨两端装有行程限位开关,当滑块运动到导轨两端边缘触发行程限位开关时,驱动电路断开,机械传动系统停止运行。
本系统选用伺服电机驱动器的额定转速为3 000 RPM,其速度控制精度为±1 RPM。该驱动器提供位置、速度、扭矩3种基本控制模式,信号来源可以是外部脉冲输入、模拟量输入或RS232通讯。本系统采用位置控制模式,信号来源选择外部脉冲输入,即驱动器接收来自主控制器的位置指令,驱使电机至目标位置。
1.2.2 软件设计
主控制器采用ARM Cortex-M3内核的STM32F103芯片,通过移植嵌入式实时操作系统FreeRTOS实现机械平台控制。主控制器通电后首先进行系统初始化,完成各功能接口设置,并创建数据收发任务、命令解析任务以及电机运动控制任务等。运行过程中,主控制器通过标准USB接口与系统管理软件实时通信,响应并解析控制指令,主要包括电机位置设置命令、查询指令及停止运动指令。系统按照命令执行相应操作后将执行结果实时反馈到管理软件 (图3)。
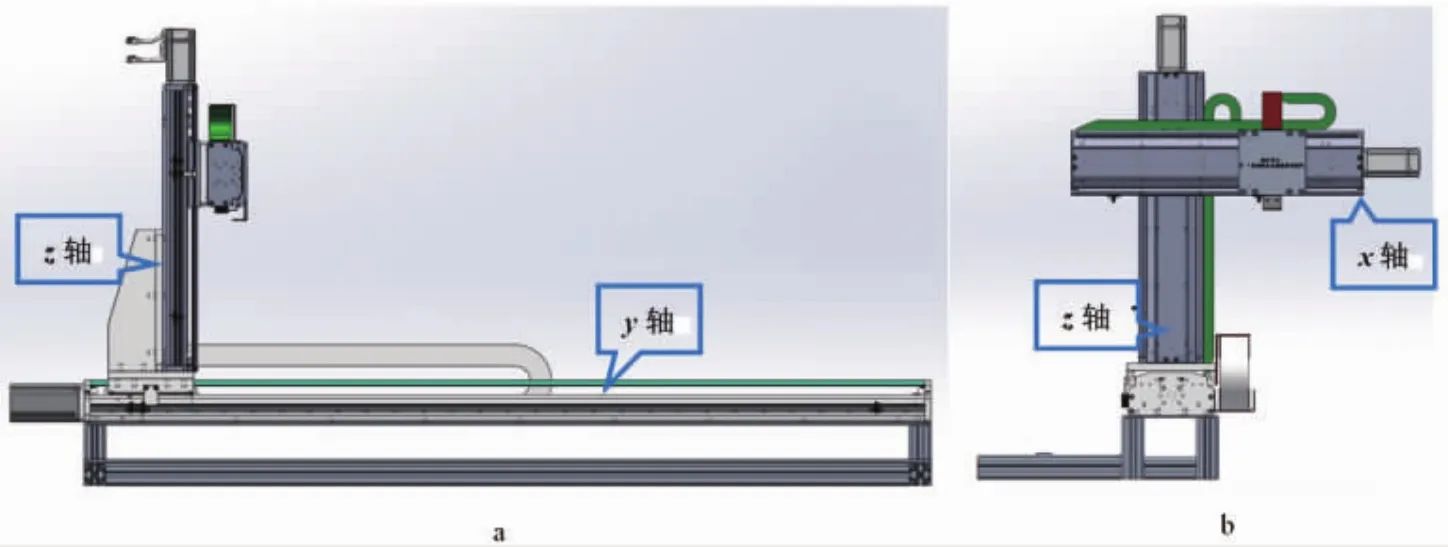
图2 三轴直线滑台结构图Fig.2 The structure diagram of three-axis linear slides
1.2.3 机械运动加减速实现
为提高运动系统控制精度,电机运行速度需要一个升速→恒速→降速→停止的过程,且升降速过程时间尽量地缩短,以提高响应速度。本设计采用S型曲线模型实现电机加减速控制,即通过改变控制器发送脉冲信号频率的方式改变电机运行速度。完整的S型曲线加减速过程的特点是存在加加速度,故加速度没有突变,避免了柔性冲击,速度的平滑性很好[7](图 4a)。
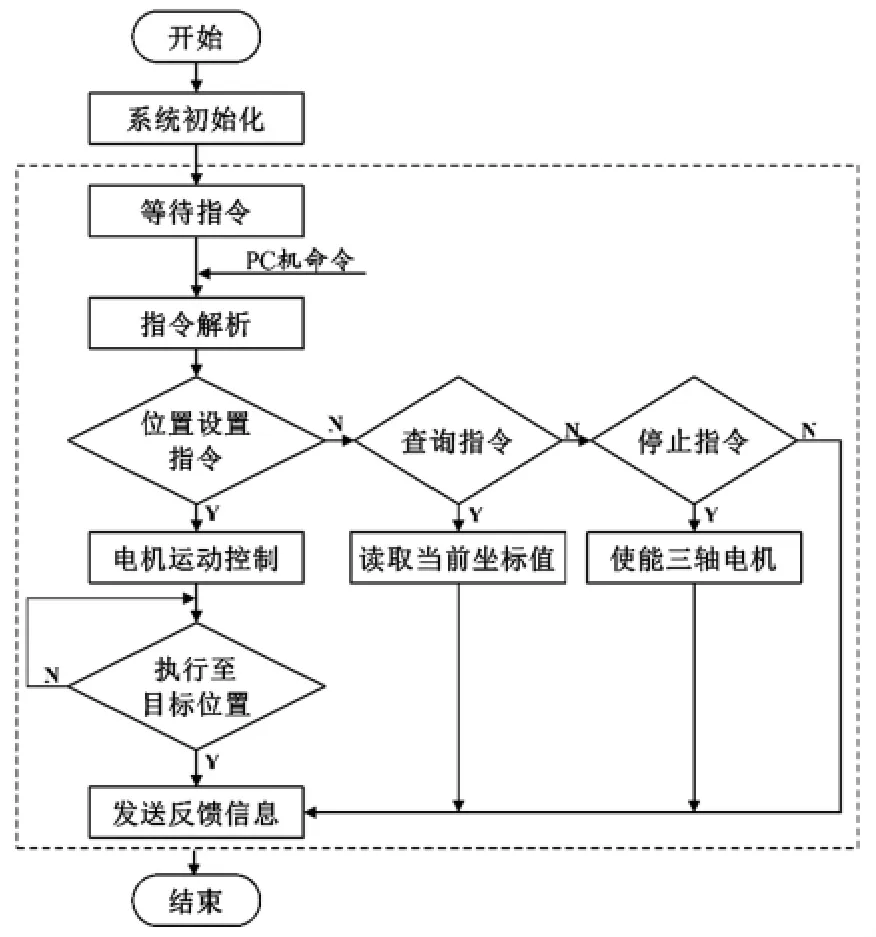
图3 系统运动控制执行流程图Fig.3 Flow chart of motion control system

图4 电机加减速控制过程Fig.4 The control process of motor acceleration and deceleration
图4a中0-t1、t1-t2时间段的曲线方程分别为公式(1)、 (2), 决定加减速过程的快慢[8]。S型速度时间曲线(图4a上图)右半边减速段可看作是左半边加速段的逆过程。将连续的加减速曲线转化为电脉冲信号控制电机的基本方法是将曲线离散化为各个频段[9](图4b),并将频段表预先固化在ROM芯片当中,系统运行时直接通过查表法加载各个频段。曲线加速阶段离散化如图4b所示。
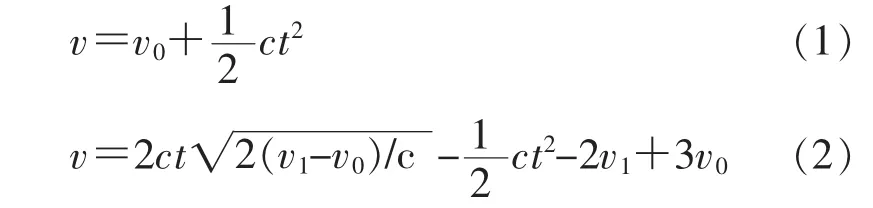
式中:c—可知参数且大于0;v0—起始速度;vt—恒定运行速度;v1—中间速度,一般取值为v0和vt的中间值即
1.3 数字化探测器设计
相比于便携式岩心β-γ编录仪的单探测器测量模式,本系统采用双探头模式分别对β、γ射线进行测量,依赖于伺服电机精确定位功能,实现两探测器位置的精确覆盖,从而准确获得岩心被测点β、γ信息。β、γ探测器主要由低压电源、高压电源、探头、跟随器、放大器、甄别器、微控制器等组成(图5)。当β或 γ射线进入闪烁体产生光子,后被光电倍增管收集,并完成光电转换,形成电脉冲后送到放大器电路,经放大、甄别后输出规则脉冲,此脉冲输入到计数电路进行计数。该数字化探测器的设计集信号采集、处理、转化、通信等多功能于一体,能够独立完成由光信号到模拟信号再到数字量的转换,最终将测量结果由主控制器传送至管理软件。
1.3.1 β探测器的信号处理

图5 β、γ探测器设计原理图Fig.5 Design principle of β and γ detector
探测器采用薄片塑料闪烁体进行β信号采集,经整形放大后以脉冲幅度甄别方式进行脉冲计数。本文利用电压比较器LM293、双D型触发器CD4013、单稳态多谐振荡器CD74HC4538M及逻辑门电路构建了单道脉冲幅度甄别电路。当信号幅值小于识别下阈时,该信号被当作探测器电路干扰而直接丢弃;信号幅值大于识别上阈时,则判断为宇宙射线被忽略;当输入信号脉冲幅度介于给定的识别阈之间时,则被认定为β粒子产生的真实脉冲信号,甄别器才输出一个幅度和脉冲宽度固定的矩形波用于计数[10]。
1.3.2 γ探测器的信号处理
在γ探测器的外形结构设计过程中,于闪烁体前增加一块厚度约为1 mm的铝屏,以消除β粒子对γ计数的影响。与β探测器类似,它也采用幅度甄别方法进行信号识别与脉冲计数,通过调节信号幅值下甄别阈,有效去掉电路干扰信号,提升真实γ信号探测效率。

图6 系统管理软件界面图Fig.6 Software interface of system management
1.4 系统管理软件设计
系统管理软件采用Qt语言编写,使用QML进行界面优化 (图6)。该软件以友好的人机交互界面,通过机械传动系统实现探测器的精确定位与测量。软件功能模块主要包括三轴电机运动控制模块、探测器参数设置模块、测量模块、数据接收模块、存储模块以及查询显示模块。其中,三轴电机运动控制模块可进行伺服电机速度、位移的精确控制,实现三维空间内点到点的定位,并实时反馈电机当前工作状态;探测器参数设置模块实现探测器的数控高压和信号识别下阈的调节。此外,该软件具有日志输出与打印功能,系统运行期间可详细记录运行数据和操作结果,便于设备调试或故障分析。
2 试验与结果分析
为了测试系统功能,验证铀矿岩心β-γ自动编录系统的可行性。本文将从机械传动系统的运行状态,探测器指标及整机的测量性能方面对本系统进行分析和评价。
2.1 机械传动系统运行误差分析
对机械传动系统搭载探测器的机械运动过程进行试验。探测器复位后,将长度为1 070 mm的岩心箱放入系统待测区,将探测器沿y轴方向从左到右逐次移动一个探头直径距离(75 mm)进行单根岩心的放射性测量,控制器输出到伺服电机的脉冲量为6 000时,获得其伺服反馈计数为5 974,系统平均运行误差为0.33 mm;在y轴有效行程内执行多次往复运动,当行程为1 315 mm时,控制器输出脉冲量为105 200,获得反馈计数为105 084,系统平均往复运行误差为1.45 mm。因此,该机械传动系统可以满足岩心自动测量时的运动要求。
2.2 探测器性能指标
将设计的β、γ探测器在国防科技工业1313二级计量站进行校准测量。采用γ测井系列模型标准装置在温度为21℃、相对湿度为45%左右的环境条件下进行探测器校准,获得其重复性、非线性、铀转换系数结果(表1、2)。由表1、2可知,探测器性能满足JJG(军工)41-2014辐射编录仪检定规程的要求。
2.3 系统性能测试
利用本系统对计量部门提供的不同直径(40、60、80 mm) 不同铀品位 (0.01%、0.1%、1%、2%、5%)的岩心模型进行测量。由于计量部门未给出设备测量计数与岩心铀含量的对应计算关系,因此,本文仅对系统测量线性度进行讨论。系统测得的β、γ计数率与岩心模型铀品位的关系如图7所示。

表1 β、γ探测器重复性及非线性指标Table 1 Repeatability and nonlinearity of β and γ detector
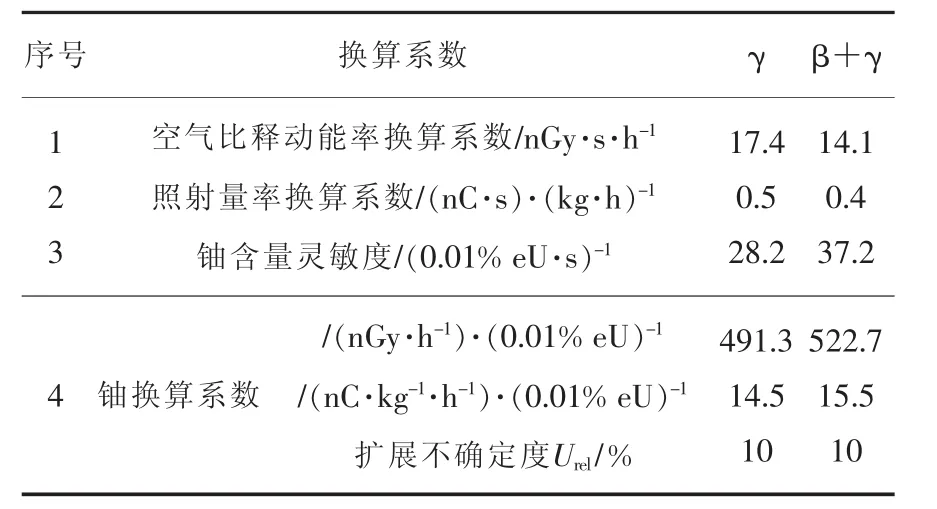
表2 β、γ探测器铀转化系数Table2 Uraniumconversionco efficient of β and γ detector
由图8可知,针对不同直径的岩心模型,随着其内部铀含量的增加,系统测得的β、γ计数率逐渐增大,且表现出良好的线性吻合度,不同关系曲线的决定系数均为0.99以上。

图7 β、γ计数率与岩心模型铀品位的线性关系Fig.7 The relationship between β, γ count rate and different grade uranium core model
3 结论
铀矿岩心β-γ自动编录系统通过伺服电机驱动各工作轴上的直线滑块运动可实现精确定位;双探测器通过搭载在该运动平台上,实现岩心β-γ的自动测量;测量数据通过计算机端管理软件进行实时保存。经试验验证,该系统的机械传动部分运动精度较高,探测器指标满足计量部门要求,整机系统性能稳定可靠。目前,该系统已在野外勘探现场展开岩心自动编录方面的应用试验。
猜你喜欢
世界核地质科学(2023年3期)2023-11-08 04:05:58
微特电机(2020年11期)2020-12-30 19:42:32
湖北农机化(2020年9期)2020-01-08 07:40:51
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
时代农机(2016年3期)2016-09-06 06:28:21
现代工业经济和信息化(2016年7期)2016-05-17 05:36:45
工业设计(2016年6期)2016-04-17 06:42:53
Coco薇(2015年12期)2015-12-10 03:34:48
建筑遗产(2014年7期)2014-10-21 20:03:07
