
地面三维激光扫描工程应用综述
2019-07-20 09:39慈伟主王路明刘艳辉
四川建筑 2019年6期
慈伟主, 王 喆, 王路明, 张 亮, 曾 月, 刘艳辉
(西南交通大学土木工程学院, 四川成都 610031)
无论是在工程的初期建设阶段,还是后期运营维护阶段,测量都是极为重要的环节。在建设阶段,测量是施工开展的第一步,测量的精度极大程度上决定了工程的质量。而在运营维护阶段,例如桥梁和隧道的变形监测,对铁路运输尤其是高速铁路运输的安全性和舒适性是非常重要的。
高精度的全站仪出现以后,测量仪器精度达到了前所未有的高度。但全站仪仍然是离散点测量模式,其有效数据量已经越来越不能满足现代土木工程的要求。在实际工程对海量测量数据需求的推动下,依托现代科技的发展,出现了集成多种高新技术的新型测绘仪器——三维激光扫描仪。
其中的地面三维激光扫描仪,可以实现在复杂的空间和地形中对目标物体进行快速连续扫描,获得激光点所扫描的物体表面的三维坐标、色彩信息和反射强度——点云数据。点云数据经过专业的后处理软件处理,可快速重构出被测物体的三维模型及线、面、体、空间等各种制图数据[1-2]。
地面三维激光扫描在诸多方面的应用研究已广泛地展开,并取得一系列成果。文章旨在对地面三维激光扫描在工程方面的应用现状做全面的梳理,分别阐述其在铁路勘察设计、隧道变形监测和桥梁变形监测当前的工程应用现状,最后提出了地面三维激光扫描在工程中的发展前景。
1 地面三维激光扫描仪原理
1.1 测量原理
地面三维激光扫描的核心原理是激光测距。它的工作过程,就是不断重复的大量的数据采集和快速的数据后处理的过程。
该类仪器主要由激光扫描系统、激光测距系统、数字摄影系统、操作控制与仪器内部校正系统等组成。扫描目标点坐标的原理如图1所示。其主要参数为距离S,水平角α和竖直角θ。
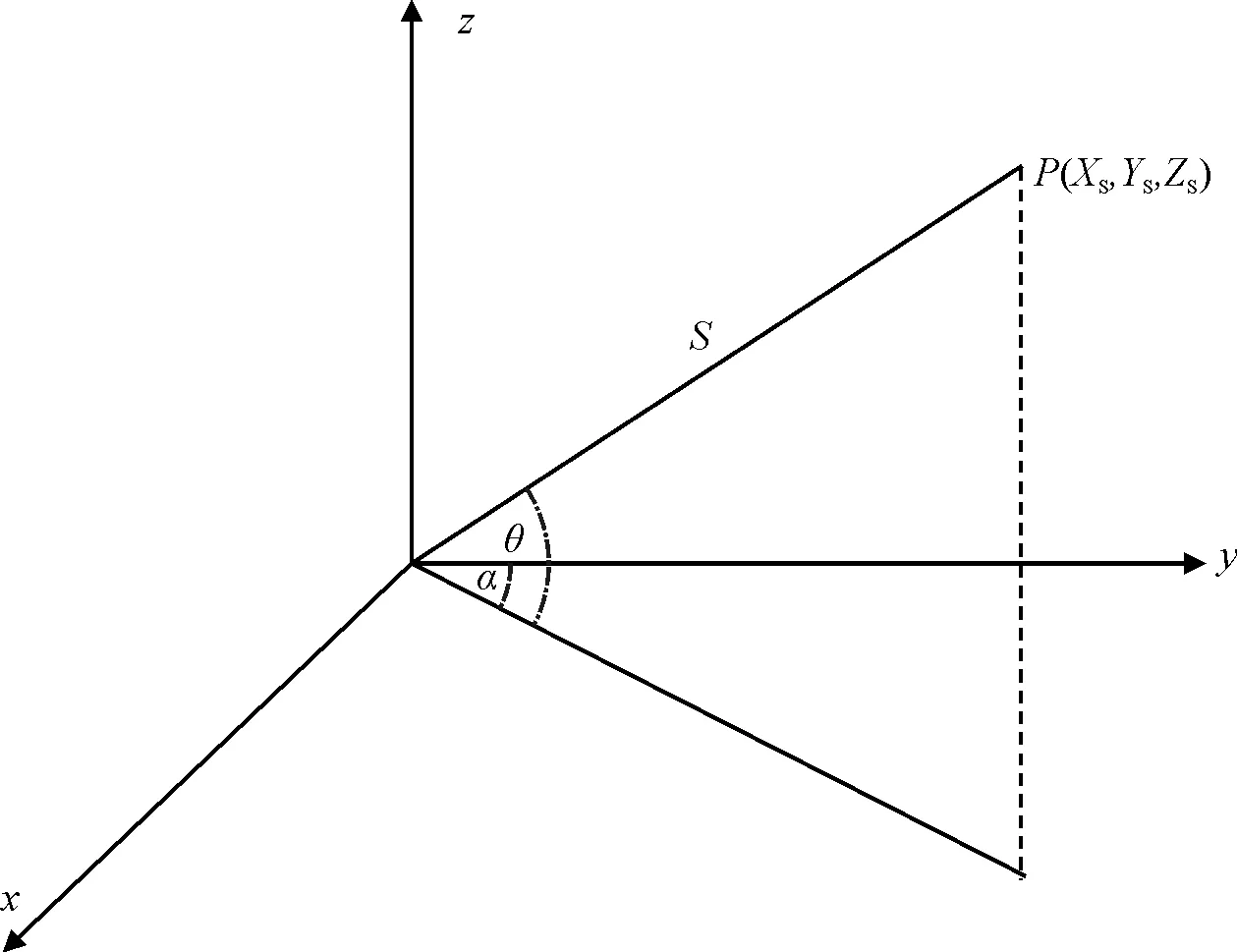
图1 三维激光扫描原理
目标点P的坐标(XS,YS,ZS)的计算公式:
XS=Scosθsinα
YS=Scosθcosα
ZS=Ssinθ
(1)
1.2 点云数据的后期处理
三维激光扫描仪获取的原始数据,必须要经过后期处理后才能使用[3],[5]。原始点云数据处理过程如图2。
现阶段已经有很多比较成熟的商业后处理软件,使用者可根据需要选取现成的商业软件,也可自己编程进行点云数据的后处理。
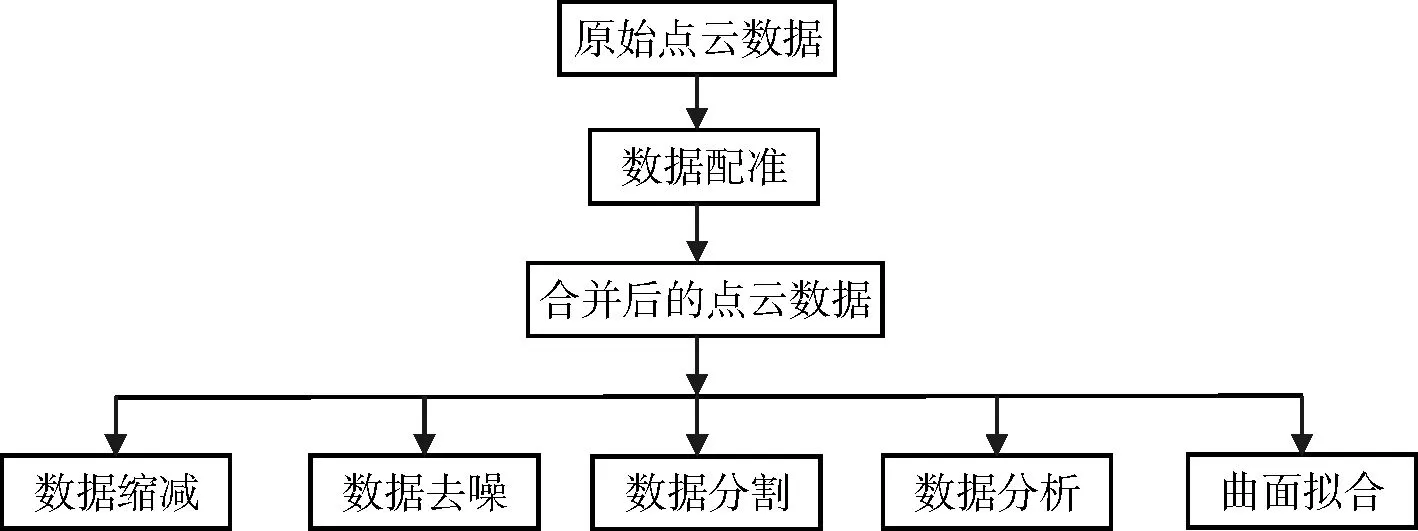
图2 点云数据处理过程
2 三维激光扫描仪的优点
(1)数据处理量大:三维激光扫描数据采集是连续的、密集的、海量的、自动的。适合大型及复杂的工程体测量及细致物体局部细节测量。
(2)非接触性:无需接触物体,且光线明暗都不影响外业测量。极大减小了外部环境对测量的约束。
(3)交互性强:得到的是数字化信息,可以方便地将3D模型转换到CAD等工程设计软件中,直接供工程使用。
(4)高精度:目前三维激光扫描仪的测量精度可以达到毫米级,点云数据后处理得当,可以进一步提高测量结果的精确度。
正是因为这些优点,地面三维激光扫描契合了我国工程发展的需求,与铁路工程勘察设计、桥梁工程变形监测、隧道工程变形监测等相结合,产生了大量的应用成果,极大地推动了工程建设和运营的发展。
3 三维激光扫描在工程上的应用
3.1 在地形图测绘中的应用
在铁路工程勘察设计初期,地形图测绘和断面测绘是其一项重要的组成部分。由于技术限制,目前,在铁路工程设计勘察中,对于1∶2 000的大范围地形图测绘,一般采用航空摄影测量和机载激光雷达测量等技术来进行测绘。而对于桥梁工程、隧道工程等局部重要工点,通常还需要额外单独测量数据;对于1∶500的更精细的地形图测绘,一般采用全站仪和GPS-RTK等单点测量技术。
正线全长246.6 km的张吉怀铁路,其线路所经的地形较为复杂、地势险峻。如果采用传统的全站仪实地逐一单点测量,不仅测量效率极低,耗时巨大,而且测量人员的安全也无法得到保障。为避免传统测量方法的缺陷,文献[11]通过采取地面三维激光扫描技术,针对地形复杂、地势险峻的隧道工程进行测量,并绘制1∶500地形图和断面图。在每个隧道口测量过程中,在保证地面三维激光扫描仪测距要求的同时,选择地势相对平坦的位置架设仪器,进行远距离无接触一站式测量。平均每个隧道口的测量外业数据采集仅耗时2 h,远小于同类工程类似地形采用传统测量方法的外业作业消耗时间。内业数据处理平均约耗时4 h,即得到了所需的地形图及横、纵断面图。因此, 采用地面三维激光扫描技术,在复杂地形下测量作业效率可得到极大提高,且测量人员的安全风险也得到了有效控制。同时,文献[11]还对其测量的25个离散检查点进行复测,复测表明,激光点云的最大高程误差仅为0.307 m,最小高程误差0.004 m,高程中误差为0.119 m,可以满足工程精度要求。同时,还发现三维激光扫描技术在树林等植被茂密区域或高遮挡物区域的高程精度要降低,也低于旱地、岩石等裸露地表。说明在当前的技术条件下,应用三维激光扫描测量时,应尽量避免障碍物对被测物的遮挡,以保证测量的精度。
文献[11]此次进行的工程实践验证了地面三维激光扫描测绘地形图的可靠性,并充分展示了三维激光扫描在铁路工程勘察设计中的广阔前景,尤其是山岭铁路、复杂地形的勘察设计。三维激光扫描可以帮助铁路工程师们在险峻、复杂地形中有效安全的得到各项测量数据,显著降低外业工作的危险性和工作强度。
采用地面三维激光扫描技术测绘铁路工程设计的地形图和断面图,能够有效的减小外业数据采集的工作强度并提高工作效率,而获取细致的地貌特征。但是,目前尚无同时实现采集、编辑、成图的一体化平台,使其内业点云数据处理的工作量较大。数据处理的相关理论及后处理软件的编制优化是该领域目前研究的重点。
3.2 隧道变形监测
我国幅员广阔,地形复杂,城市人口密集,交通工程中不可避免会涉及到大量的隧道工程。无论是山岭隧道、水下隧道还是城市隧道,其变形监测都是不可缺少的。变形量是评价隧道结构安全状态的重要指标。而传统的测量技术虽然有较高的单点测量精度,但是测量速度偏低,测点数量也相对偏少,因此无法全面的反映隧道结构的整体变形信息。而地面三维激光扫描技术则自动、高速、海量、高精度的获取目标物体的三维坐标,从而全面的反映隧道结构的整体变形,克服传统测量技术在速度、整体上的局限性[4],[7],[10]。
顶管法施工的上海市西藏路电力隧道就采用了地面三维激光扫描技术来测量其变形量。隧道图片及通过Leica C10激光扫描仪得到的点云图像见图3。
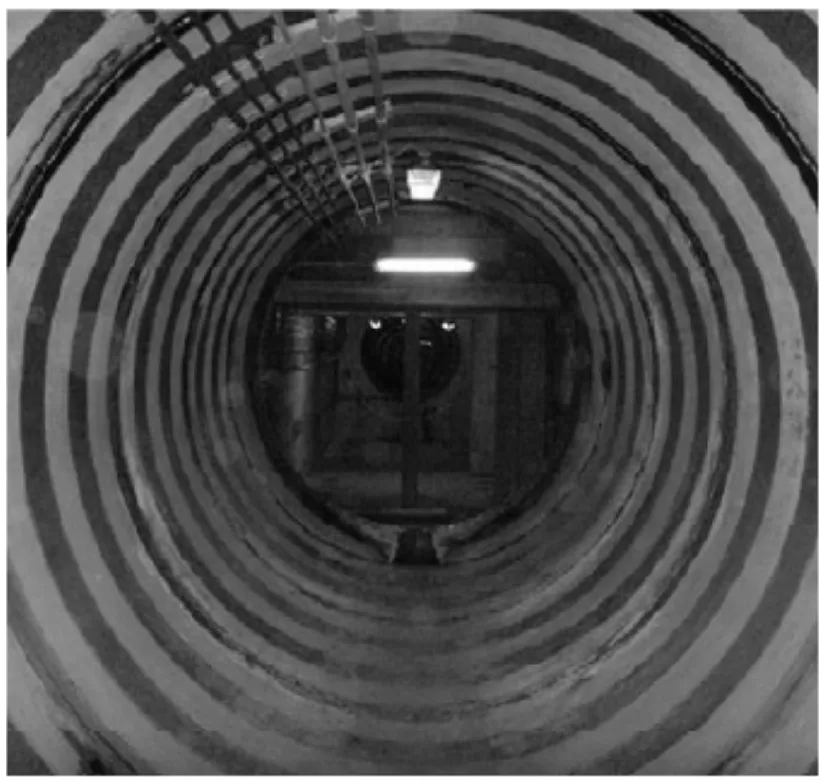
(a) 隧道图片
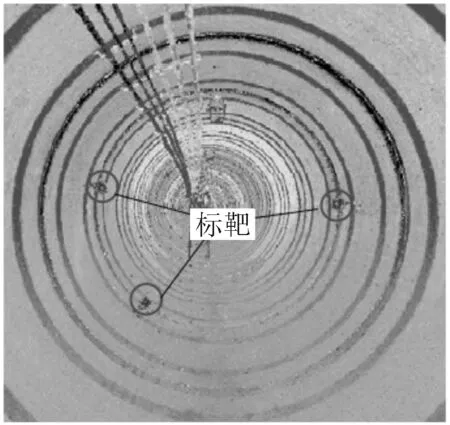
(b) Leica C10激光扫描仪 得到的点云数据
在数据处理方面,由于地面三维激光扫描获取的原始点云数据不能直观地表示隧道的变形,因此对点云数据进行了曲线拟合,使隧道变形可视化。鉴于顶管法施工的隧道大都是圆截面隧道,故采用平均变形椭圆来描述隧道结构横断面的相对变形。具体的数据处理过程中,首先运用误差分布统计规律将获取的点云数据进行去噪、平滑处理,然后对每个区段的点云数据提取关键点,进行椭圆曲线拟合,即得到隧道变形后的形态(图4)。将得到的隧道变形后的形态与设计图对比,就得到了隧道变形情况。通过对比不同时间段的三维激光扫描拟合数据,排除了施工时产生的误差[7]。隧道变形监测中应用三维激光扫描,与传统测量方法相比,突出展现了三维激光扫描在获取数据的数量和效率上的优势。三维激光扫描突破了传统测量方法中以离散点的方式获取数据的局限,以连续曲面的形式获取并处理数据。从而能全面反映隧道的整体变形。另外,文献[4]通过与全站仪的精度比较试验,如图5,发现利用上述的隧道三维建模算法得到的变形量与全站仪的测量结果相差在2 mm以内。充分验证了三维激光扫描在隧道变形监控领域的可靠性。
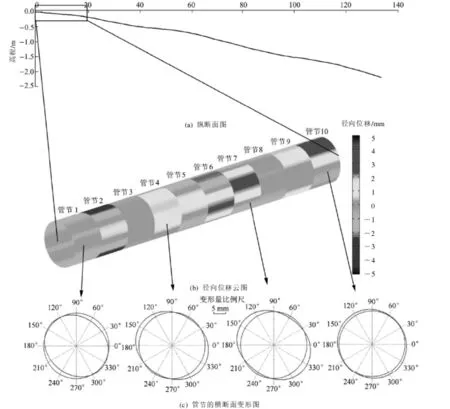
图4 隧道相对变形分析结果

图5 TS30全站仪和C10激光扫描仪的测点数据比较
3.3 桥梁的变形监测
我国现阶段建设的高速铁路的轨道多铺设在连续高架桥上。桥梁的整体变形就极大的影响了列车运行的安全性及舒适性。故桥梁的变形监测是铁路安全管理中极为重要的部分。变形监测时,与基于全站仪或GPS的传统变形监测相比,三维激光扫描采样点数发生质变,形成了一个三维模型数据场。这能有效避免以往变形监测方法所造成的局部性和片面性,能快速精确地反映出桥梁总体的变形趋势和局部的变形量;且能直接生成数字化信息,为之后的数据处理和存储提供了极大的便利。
文献[8]对赵家坝立交某段进行了三维激光扫描测量试验研究。为能够精确获取测量数据,在立交四周布设了4个控制点(图6)。扫描仪设置在ZPJ3和ZPJ4上,标靶设置在ZPJ1和ZPJ2上,其中ZPJ1作为后视定向点,ZPJ2作为检校点。试验中采用了Riegl VZ1000扫描仪进行扫描。共对赵家坝立交试验段进行了两期扫描。

图6 控制点位置示意
该试验重点探讨了测量桥身整体变形时点云的后处理方法,点云的后处理通过 RISCAN PRO 软件实现。主要过程是先坐标转化,后进行拼接。具体过程为首先导入点云数据,然后通过软件的 Backsighting Orientation 功能对点云数据进行坐标转换;最后运用软件的 Multi Station Adjustment 功能对点云数据进行精细拼接。拼接后得到试验段的整体点云数据,其拼接精度为2 mm。
通过人机交互方式剔除多余无效的点云数据之后,可以得到试验段的点云数据(图7)。为使建立的模型外形平顺符合实际,使用软件的“减少噪音”功能对点云进行去噪处理。虽然数据更多意味着更精细,但对于建立桥身变形后的模型而言,过多的数据不仅会消耗更多资源降低建模效率,还会因模型表面过于细碎而降低模型的可用性。所以需要对点云数据进行合理地抽稀。利用“统一采样”功能对点云数据进行抽稀处理,得到抽稀后的点云数据(图8)。可看出,点云数据抽稀处理后物体的轮廓特征并没有太大的变化,得到了很好的保留。再运用“封装”功能,得到桥梁结构的三角网模型(图9)。最后将试验段桥面两期模型数据导入Geomagic Qualify软件中,对每期数据之间的变化进行提取分析(表2)。
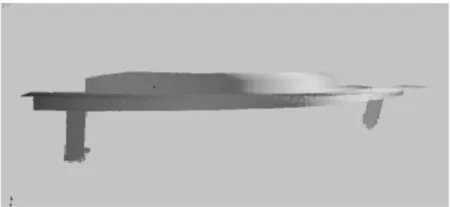
图7 试验段点云数据

图8 点云抽稀处理结果

图9 试验段三角网模型
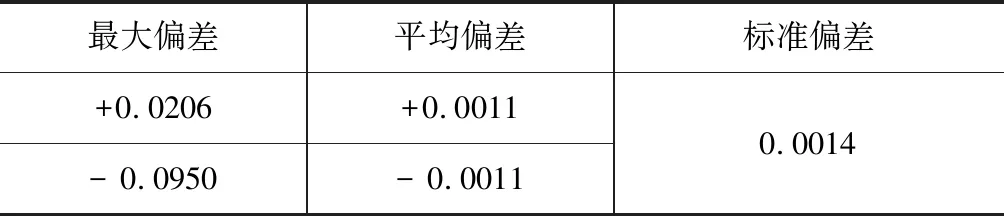
表2 3D分析结果 mm
通过对比试验段不同时期的模型数据,可发现最大偏差出现在模型的边缘,同时两期模型并没有发生很大的变化,相互印证了模型数据的可靠性。
虽然三维激光扫描的单点定位精度没有传统测量方法高,但是其点云数据作为一种整体数据,处理数据量大,交互性出色,经过有效的后处理后,建模精度却是很高的。三维激光扫描进行桥梁的变形监测,正是应用了这一优势。此外,由于三维激光扫描测量的高效性,也极大缩短了因测量影响通行的时间。
4 结束语
三维激光扫描凭借其高效率、高精度、非接触性和交互性强等优点在土木工程许多方面得到了应用,并取得了一定的成果。三维激光扫描应用的成功实践证明,三维激光扫描应用可以更好的指导铁路的勘察设计以及桥梁工程、隧道工程的变形监测。但是,当前工程中三维激光应用还处于初级阶段,多数都属于单点应用,不能应用于全局工程,而且三维激光扫描的应用一般局限于新建工程项目,对于旧桥旧隧道工程的应用较少,对于运营方面的应用也较少,三维激光扫描应用之路才刚刚开始。为了更好地促进三维激光扫描技术在工程中的应用,可从以下三个方面来进行进一步的研究:
(1)软件平台问题,目前尚无集采集、编辑、成图一体化的处理平台以更好更快速更高效的处理数据。因此,需要加快软件开发以更快促进其在铁路工程上的全面应用,提高工程效率。
(2)特殊地貌误差源问题,铁路工程一般是长条带状工程,地形起伏大、自然环境复杂。在植被茂盛、遮挡物较多的地貌,如何解决非地貌的点云数据摄入,降低特殊地貌误差来源,避免局部数据与实际情况脱节,提高工程精度。
(3)桥梁、隧道变形监测完善体系问题,无论是三维激光扫描的变形分析理论及方法还是其变形分析结果的评价,都需要一个完善规范的理论和技术体系。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
中国外汇(2019年6期)2019-07-13
模具制造(2019年3期)2019-06-06
小哥白尼(趣味科学)(2019年2期)2019-04-17
小读者(2019年24期)2019-01-10
小天使·四年级语数英综合(2016年11期)2016-11-29
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
中国交通信息化(2015年7期)2015-06-06
