浅谈中职学校工业机器人课程混合式教学实践①
2019-07-19 08:18王鹏
现代职业教育·职业培训 2019年5期
王鹏


[摘 要] “工业4.0时代”来临,工业机器人在智能制造中扮演着重要的角色。“如何提高工业机器人课程教学质量,以培养中职院校学生有效掌握工业机器人技术”已成为不少学校面对的问题。以“工业机器人工程应用虚拟仿真”课程中“工业机器人简单搬运”课题为例,对中职学校该课程“线上线下”混合式教学模式进行初步实践。
[关 键 词] 中职学校;工业机器人;混合式教学
[中图分类号] G712 [文献标志码] A [文章编号] 2096-0603(2019)15-0016-02
隨着“工业4.0”智能制造的到来,工业制造领域对智能化生产模式的需要日益增长。工业机器人在提升生产效率和降低生产成本方面扮演着重要的角色,工业机器人行业迎来黄金发展期。面对新形势与新变革,在传统教学方式上建立一种新型教学模式,以更好地提高课堂教学质量。
一、混合式教学概述
通过将传统学习的优势与数字化或网络化学习的优势结合为基本学习形式,有机地整合不同的学习资源、学习活动和学习策略,以期达到最优化教学效益的一种教学模式。混合式教学模式更加强调“以学生为主体,教师为主导”,充分发挥学生学习的积极性、创造力和主动性。因此对教师的教学提出了更高要求,使教师更好地教,学生有效地学。
二、工业机器人教学现状
目前,中职学校工业机器人教育仍处于起步阶段,专业培养方案还不完善,加上学生的专业基础相对于高职学生较为薄弱。受学校的条件限制,学生很少有机会能接触到工业机器人的实物,不能全面和真实地了解工业机器人技术。不同学校的工业机器人教学所使用的教材也不尽相同。通过教学实践发现,在开设“工业机器人实操与应用”课程之前,可先行开设“工业机器人工程应用虚拟仿真”课程。这样,一方面降低了教学成本;另一方面学生通过模拟真实的场景,可以了解实际岗位上操控机器人需要的真实技能。通过运用“工业机器人工程应用虚拟仿真”教程,主要培养学生通过仿真软件对工业机器人进行基本操作、功能设置和示教编程等,为后续专业课程学习打下必要的基础。
工业机器人课程的教学模式多以课堂教学为主。受硬件条件的限制,有些学校基本上以课堂教学为主。课堂上,教师主要依靠纸质教材和课件进行知识点的讲解。显然,理论知识讲授占很大的比重,很难激发学生的学习热情和兴趣,对培养学生的自主学习能力、团队协作能力、创新等能力的作用显得微乎其微。
三、混合式教学在工业机器人课程中的实践
为提高“工业4.0时代”背景下中职学校工业机器人课程的教学质量和效率,充分借助信息化技术手段,采用“线上线下”混合教学模式,有效地将知识点传授给学生,提高学生的实践能力与自主学习能力。
如以“工业机器人简单搬运”课题为例,按照“线上线下”混合教学模式,把教学过程分为课前、课中和课后三个阶段。
课前:教师将课前学习资源上传到课程教学平台,并且通过手机邮箱、QQ、微信等发布课前预习通知。学生接到预习通知后,登录课程教学平台,通过在线学习区的电子课件、微视频、虚拟仿真等信息化教学资源进行自主学习并且检验自学效果,拓展了学习的时间与空间。此外,还设置教师答疑区和综合讨论区,以便及时为学生答疑解惑,学生之间可以互相讨论交流,满足学生多样化的学习需求。
课中:课堂教学活动主要通过创设情境任务引入、任务分解、任务实施和任务总结等环节完成教学任务。
(一)创设情境任务引入
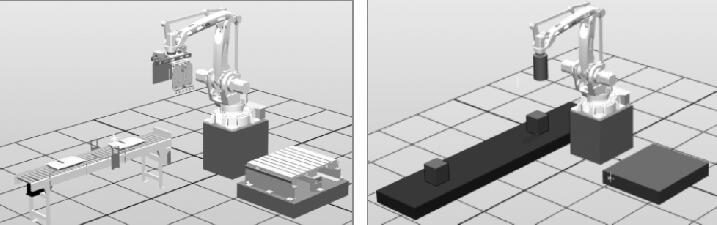
首先,通过观看一段“企业生产线搬运机器人”视频,让学生对机器人搬运有直观的认识。接着,设疑启发:让学生观察两幅图片有哪些不同。当使用RobotStudio进行机器人的仿真验证时,如果对周边模型要求不是非常细致的表述时,可以用简单的等同实际大小的基本模型进行代替,从而节约仿真验证的时间,激发学生自己尝试制作机器人简单搬运的兴趣,调动学习的积极性。
(二)任务分解
根据制作简单搬运工作站的一般流程,通过自主学习、小组协作学习、模拟实训和教师引导,将教学任务分解为三个小任务来实施,分别由三名学生完成。任务一:简单搬运工作站模型创建;任务二:机器人搬运轨迹示教编程;任务三:机器人仿真及调试。通过任务分解,引导学生在各阶段扮演不同角色。
(三)任务具体实施
任务1:简单搬运工作站模型创建
首先要求学生登录课程教学平台,观看机器人简单搬运工作站模型创建的微视频,结合教师下发的图纸,在RobotStudio仿真软件“ABB模型库”中导入合适的机器人本体;接下来,通过“建模”功能,创建所需模型。学生在制作过程中发现问题,及时向教师提出,教师根据学生提出的问题加以引导。之后,教师通过仿真软件进行演示,解决学生制作过程中存在的问题。在整个过程中,教师起到的是引导与辅助作用,体现了“做学教合一”的课堂教学模式。
任务2:机器人搬运轨迹示教编程
本环节中,利用事件管理器添加机器人提取、释放物品动作,机器人搬运轨迹是本次课的教学重点,也是教学难点。为了激发学生学习的积极性,通过设疑启发:机器人末端执行器的吸盘夹具到达物体上方,物体如何被附加到吸盘夹具上?机器人到达指定位置后,物体如何从吸盘夹具上提取下来?学生带着问题先通过课程平台上的视频和课件进行自主学习再模仿操作。首先,学生创建一个用于提取、释放物品的虚拟信号并利用事件管理器添加提取、释放物品动作。接下来,根据小组讨论规划的机器人搬运路径,运用机器人运动指令moveJ和moveL进行搬运轨迹的示教编程。教师巡回指导,及时解决学生示教编程中存在的问题。之后,教师再通过仿真软件进行演示,解决教学中的重点与难点。学生根据教师的示范演示后,进一步修正、完善搬运轨迹的示教编程。为了检测学生的学习情况,教师可以通过极域电子教室软件让学生将自己的操作方法展示给所有学生看,实现良好的互动和交流;同时检验各组内部由合作学习递进到自主学习的成效。
任务3:机器人仿真及调试
在前面两个任务完成的基础上,学生对整个机器人搬运工作进行仿真验证。学生在仿真、调试过程中,将发现的问题记录下来,如果与其他组相同,可以一起探讨解决。教师巡回指导,引导学生分析、解决问题。
(四)任务总结
任务完成后,学生可以利用RobotStudio仿真软件中的录屏功能将所制作的作品上传至课程教学平台中。通过自我评价、组内互评、组间互评和教师评价四维评价方式,评选出优秀小组和个人。总结评价的同时要求各组学生将整个制作过程中的经验和不足进行小结,不断优化所学知识点,以便在今后的学习过程中加以改进。
课后:为了巩固和提升所学知识点,进一步强化学生的工程应用能力和创新能力,设立了课后拓展任务:制作一个带导轨的机器人搬运工作站。学生登录课程教学平台,观看、学习并完成拓展任务。教师对作业中的问题进行点评并及时反馈给学生。
四、结语
工业机器人是一门理论性和实践性都很强的课程。通过“线上线下”混合式模式在“工业机器人工程应用虚拟仿真”课程中的应用,解决了“重理论,轻实践”“受硬件条件限制”等问题。这种教学模式既调动了学生的学习积极性和主动性,又培养了学生的自主学习能力和创新能力,使学生能够相对容易地理解和掌握工业机器人的知识。
参考文献:
[1]王海琴,赵水.基于“互联网+课程”背景下的教学模式探讨[J].新课程研究,2017(9):73-75.
[2]袁永伟,李珊珊,孔德刚,等.虚拟仿真在“工业机器人”实践教学中的应用研究[J].教育现代化,2017(34):190-191.
[3]吴华娟.基于“任务驱动、理实一体”教学模式的《电子技术基础与技能》课程教学设计[J].江苏教育研究,2016(30):35-38.
[4]赵达.基于混合学习的工业机器人技术专业教学设计与开发[D].天津:天津大学,2017.
编辑 冯永霞
猜你喜欢
理财·市场版(2022年5期)2022-05-30
伙伴(2020年3期)2020-04-14
知识窗·教师版(2017年3期)2017-06-20
福建中学数学(2016年4期)2016-10-19
Coco薇(2015年10期)2015-10-19
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
全国新书目(2009年24期)2009-07-17
中国经济信息(2004年15期)2004-08-10