
基于电力巡检的四旋翼无人机控制系统研究
2019-07-18 03:08刘佳鑫贾云飞冯恺鹏
测试技术学报 2019年4期
刘 豫,刘佳鑫,贾云飞,冯恺鹏
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.国网辽宁省电力有限公司电力科学研究院,辽宁 沈阳 110006)
近年来,随着国内经济的不断发展,人们对于电量的需求不断增加,大量特高压输电线路不断地建造并投入运营,这些电线一般都位于山区荒漠等人迹罕至的区域[1-3].传统的电线检测效率低,且需要大量劳动力,不能适用于如今日益复杂的电网结构,因此,为了使输电线路检测向智能化自动化方向发展,通过无人机搭载航空巡视装置,对电力系统进行检测,这种方法相较于传统的巡检模式具有效率高、不需要大量劳动力、安全系数极高、适合野外作业、使用和维护费用低等优点[4-5].为了实现对无人机的控制,让其实现电力巡检作业,设计了合理的巡检系统以及四旋翼无人机的控制系统就显得尤为重要.本文对无人机电力巡检系统进行研究分析,就其中四旋翼无人机电力巡检系统设计了相应的控制模块.
1 基于无人机的电力巡检系统组成
无人机的巡检系统由两部分组成:① 机载巡检系统;② 地面工作站.其中机载巡检系统主要由4个分系统组成,包括:无人机、无线通讯装置、检测装置、数据管理[6].无人机巡检系统总体结构如图1 所示.
地面站系统是整个系统的指挥中心,其主要任务就是对无人机进行操控,同时还需要接收由机载巡检装置拍摄的图像信息,并将其实时显示出来,由地面人员进行监控,实时发现电力系统中可能存在的问题,并进行维护.
一般情况下,用于电力巡检系统中的无人机大致可分为两种:① 固定翼式无人机;② 旋翼式无人机.旋翼式无人机以其体积小,结构简单,成本低,机动性高,具有垂直起降和悬停能力等众多优点,常被用于电力巡检系统.而旋翼式无人机中又以四旋翼无人机应用最为广泛.
机载无线通信系统接收地面站发送的控制指令,同时,又将无人机采集到的各种电力线状态信息以及无人机自身的位置与姿态信息发送给地面站,对于电力巡检系统,无线通信系统传输的状态信息主要是电线的图像信息,一般情况下,无线图像传输与位置及姿态信息传输分为两部分,即图像传输系统与数据传输系统,以确保检测设备拍到的图像实时传输到地面站.
数据管理分系统主要是将图像与电力线预存的图像进行对比,保证在地面站无人的情况下,仍能通过图像数据与数据库中已存在的数据进行对比,生成报告,检测电力线中是否存在缺陷,可以提高系统的检测精度,对故障的查询以及管理更有益处[7].
2 四旋翼无人机控制系统研究
2.1 控制器设计
为了研究方便提出以下几点假设:① 四旋翼无人机是结构完全对称的刚体,运动过程中不会发生弹性形变;② 四旋翼无人机的机翼正交安装,且几何中心、重心以及机体坐标系的原点重合;③ 四旋翼无人机的4个螺旋桨产生的升力与反扭矩仅与旋翼的转速有关.
基于以上假设,四旋翼无人机的动力学模型就成了一个结构对称且质量均匀的6自由度刚体模型,其运动可以分为系统质心的平动以及系统绕质心的转动.
建立四旋翼动力学模型:
式中:U1,U2,U3,U4为4旋翼无人机控制系统的4个控制量;l为四旋翼无人机电机转轴距机体中心的距离;K1,K2,K3,K4,K5,K6分别为四旋翼无人机飞行过程中平动与转动时受到的阻尼系数;d1,d2,d3,d4,d5,d6为系统控制过程中受到的随机扰动,该扰动有上界,即d<|D|,D为常量.由于四旋翼无人机系统是个典型的欠驱动非线性系统,因此采用滑模变结构控制器,可以有效地对其进行控制.因此,系统整体控制器如图2 所示.
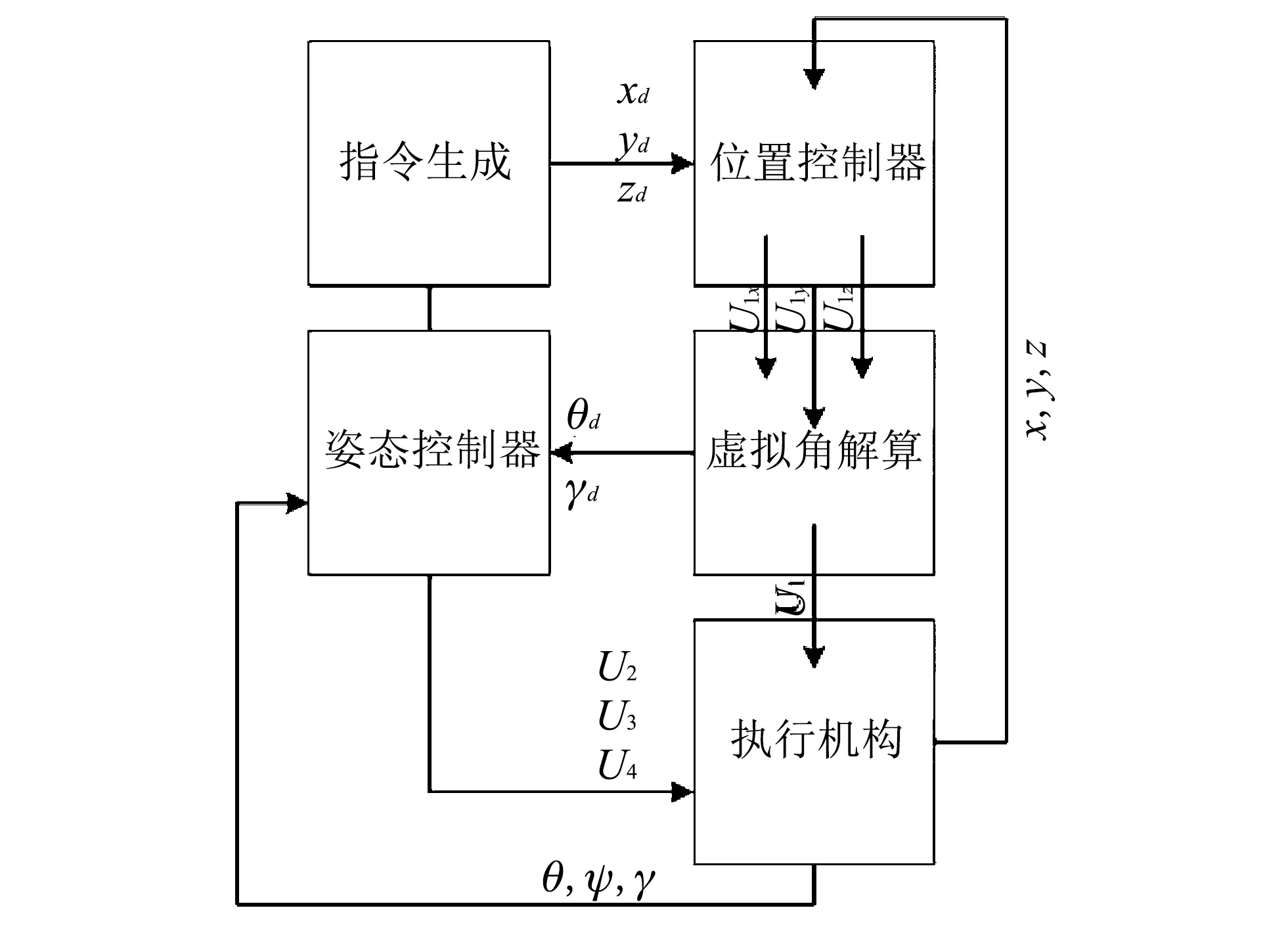
图2 系统整体控制器Fig.2 System integral controller
整个控制系统分为内外两环进行控制,外环为位置控制器,内环为姿态控制器.根据系统状态方程可以得到四旋翼无人机系统各子系统基于滑模变结构控制器的控制律,四旋翼无人机位置控制器控制律为
姿态控制器控制律为
由于通过姿态控制系统中ψ子系统单独的控制律设计可以实现对ψd的快速跟踪,因此假设满足位置控制律所需的姿态角为γd,θd,通过式(4)进行求解,得到外环产生的中间指令信号θd,γd和位置控制系统的控制律U1.

(4)


(5)
式中:v(t)是待微分量;x1是对信号进行跟踪;x2是信号的一阶导数;x3是信号二阶导数的估计量.
由文献[9,10]可知,在内环控制中,内环系统的跟踪误差会对整个闭环控制系统有较大的影响,因此,为了保证整个闭环系统的稳定性,一般通过使内环收敛速度大于外环收敛速度的方法.本算法中通过调整内环控制系统的增益系数,保证内环收敛速度大于外环收敛速度.
对于该四旋翼无人机控制系统,定义Lyapunov函数

(6)

通过Matlab对该控制器进行仿真,Matlab的Simlink仿真图如图3 所示.
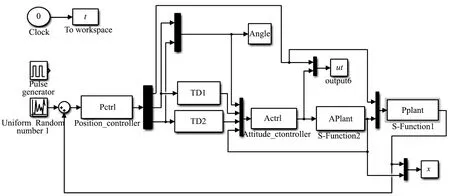
图3 Simlink仿真图Fig.3 Simulation diagram of simlink

图4 跟踪性能仿真图Fig.4 Tracking performance simulation diagram
从图4 中可以看出,该算法对于正弦余弦信号以及阶跃信号的跟踪相应时间较快,且超调量较小.
由于在无人机电力检测过程中,四旋翼无人机很容易受到外界干扰,因此对系统抗干扰能力进行在线仿真,在8 s时给系统未知信号引入一个幅度为2的干扰信号,则系统抗干扰性能如图5 所示.

图5 抗干扰性能仿真图Fig.5 Anti-jamming performance simulation chart
图5 中可以看出,在系统受到干扰后,四旋翼无人机可以自主地回到目标轨迹,因此在电力检测过程中,四旋翼无人机在地面无人操控的情况下,受到外界干扰,仍然能够按照预期轨迹进行飞行,完成对电力设施检测的任务.
综上,通过对四旋翼无人机设计滑模变结构控制器,并用Matlab进行在线仿真,结果表明该控制器拥有较好的轨迹跟踪性能,在无外界控制信号输入时,受到外界干扰后,仍然能够继续跟踪目标轨迹,完成预期任务,因此运用滑模控制器的四旋翼无人机可以很好地完成按照规定轨迹的电力巡检任务.
2.2 四旋翼无人机控制系统设计
四旋翼无人机控制系统采用ARM处理器,ARM处理器是一种低功耗的RISC微处理器,其大量使用寄存器,指令执行速度快,执行效率高.本系统中ARM芯片选择的是STM32F103ZET6,其内核是ARM32位的Cortex-M3,最高可达72 MHz 的工作频率,芯片集成了定时器、ADC,UART,SPI,I2C,CAN等外设.姿态测量传感器选用MPU6050,其是一款整合性6轴运动处理组件,相较于其他组件方案,它能免除组合陀螺仪与加速度计时间轴之差的问题,同时也大大减少了封装空间,它能通过I2C或者SPI端口提供完整的九轴运动融合数据输出.STM32最小系统如图6 所示.

图6 STM32最小系统电路图Fig.6 STM32 minimum system circuit diagram
控制系统接收MPU6050整合的姿态信息,通过STM32进行控制算法运算,产生电机所用PWM信号,根据PWM的占空比调节电机转速,从而调节四旋翼无人机的姿态,让无人机按照地面站指令轨迹进行飞行.
由于四旋翼无人机巡检系统往往需要进行长时间的探查,为了让无人机在电量耗尽时提前返航,本系统加入了对四旋翼无人机电量检测功能,对于一般锂电池,其电压会随着其电量的减小而变低,因此可以通过STM32的ADC外设对电池电压进行监测,以保证让四旋翼无人机有充足的电量进行返航.STM32控制系统程序流程图如图7 所示.

图7 STM32程序流程图Fig.7 STM32 program flow chart
3 结束语
本文为用于电力巡检的四旋翼无人机设计控制算法,通过构造Lyapunov函数,证明系统的稳定性,并通过Matlab的Simlink仿真功能,验证了该算法拥有较优异的轨迹跟踪性能,以及受到干扰后快速恢复原轨迹功能.通过使用STM32与MPU6050设计了相应的硬件系统,通过PWM波控制电机转速,从而达到让四旋翼无人机按照目标轨迹飞行的目的,从而完成电力巡检的任务.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
广东医科大学学报(2020年6期)2020-02-06
电子制作(2019年9期)2019-05-30
中国微创外科杂志(2018年9期)2018-10-09
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
北京航空航天大学学报(2016年8期)2016-11-16
