
四轴飞行器的欧拉动力学方程
2019-07-18 09:36:36刘彦超
中阿科技论坛(中英文) 2019年2期
刘彦超
(包头轻工职业技术学院,包头 014030)
随着小型无人机在航拍、测绘勘查、电力巡线、灾难救援以及突发事件应急处理等领域的应用越来越广泛,小型无人机的研究已逐渐成为一个热点领域。

图1 四轴飞行器结构简图
四轴飞行器有十字型和X型两种,其中十字形结构如图1所示,四个电机和螺旋桨分别对称分布在机体的前、后、左、右支架末端,且处于同一高度,电机型号和螺旋桨的尺寸均相同,其中1号和3号电机逆时针旋转,2号和4号电机顺时针旋转(规定1#电机所指方向为x轴正方向,2#电机所指方向为y轴正方向)。当四个旋翼的角速度ω1、ω2、ω3、ω4相等时,(理想状态下)其对应的升力F1、F2、F3、F4也相等,进而在升力与重力的共同作用下,机体可悬停或起降;当ω1≠ω3时,F1和F3的差分变化产生俯仰力矩Ty,使得αy角变化;当ω2≠ω4时,F2和F4的差分变化产生滚转力矩Tx,使得αx角变化;当 ω1+ω3≠ω2+ω4时,四个旋翼的反扭合力矩Tz使得机体发生偏航,αz角变化。注意这里的αx、αy及αz不是欧拉角,而是机体适时偏转角度。
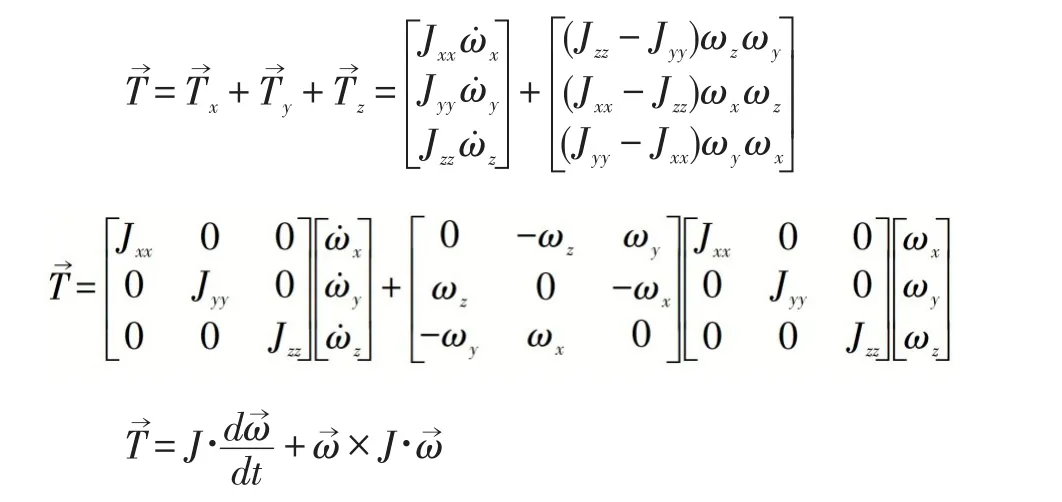
显然,机体姿态角的变化不仅仅与力矩Tx、Ty及Tz有关,还和机体的转动惯量有关,所以可用欧拉动力学方程来描述机体所受合力矩:

欧拉动力学方程用于描述刚体绕定点运动,是研究多旋翼无人机的有利工具,但多数力学教材及惯性导航文章对其物理意义的讨论都比较少,只是由哥氏定理(向量绝对导数与相对导数的关系式)直接得出结论,所以多数人对其物理意义并不是很清楚。本文利用陀螺力矩概念对欧拉动力学方程进行了推导和论证,可供同行参考。[1]
一、陀螺力矩

图2 陀螺力矩
如图2所示,质量为m的刚体绕z轴以角速度ω→高速旋转,形成动量矩G→。平行于x轴的力F→作用于刚体的质心位置r→,将产生一个指向y轴正方向的力矩:

显然力矩T→作用Δt时间后,将产生一个指向y轴方向的动量矩增量:

这时刚体的总动量矩为:
综上所述,陀螺力矩可定义为是陀螺力图保持自身转轴方向不变,所产生的用于抵抗外力矩T→的力矩。[2]
二、刚体动力学方程
如图3所示,这里的ω→可看成是以坐标轴为转轴的三个角速度向量及的合成,显然刚体在 x、y及 z方向上的动量矩分别为:当转距 T→作用于刚体时,刚体将加速旋转。同样转矩也可沿坐标轴分解为三个向量,即及


图3 z轴方向的动量矩增量
显然刚体以角速度ω→y绕y轴旋转Δt时间后,x方向的转轴会上翘个弧度,从而动量矩会向上偏转变为。所以存在动量矩增量,其方向为z轴的正向。当 Δt足够小时,可以将由及组成的三角形看作是一个扇形,显然有:

综上所述,显然有


同理可得:

显然:
三、结论与效果
通过本文对欧拉动力学方程的推导来看,合外力矩 T→ 可分为两部分,一部分是 J(dω→ dt),它用于产生机体角加速度,另一部分是 ω→×J∙ω→,它用于抵抗陀螺力矩。
本文利用陀螺力矩概念对欧拉动力学方程进行了推证,其物理意义更加明确,这将会增进无人机爱好者对四轴飞行器动力学机理的理解,推进无人机事业的发展。[4]
猜你喜欢
汽车观察(2022年12期)2023-01-17 02:20:42
哈哈画报(2022年1期)2022-04-19 11:27:20
车迷(2022年1期)2022-03-29 00:50:26
高师理科学刊(2020年2期)2020-11-26 06:01:32
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
北京航空航天大学学报(2017年1期)2017-11-24 05:22:11
数学小灵通·3-4年级(2017年9期)2017-10-13 08:11:04
