铁路地形图建筑物的自动化提取方法研究
2019-07-18 02:11汤建凤
铁道建筑技术 2019年3期
汤建凤
(中铁第四勘察设计集团有限公司 湖北武汉 430063)
1 概述
铁路工程设计时需要铁路设计方案走廊带的地形图作为设计基础资料,地形图的生产是铁路设计中的重要一环。目前地形图生产方式主要为航空摄影测量。随着测绘科技的进步,基于机载激光雷达的地形图的制作方法应用越来越广泛。相比基于影像的立体测图,基于机载激光雷达技术可以在少量人工干预下高精度、高效地完成等高线和高程点的采集工作。然而,目前基于机载激光雷达的地形图测绘中地物要素测绘仍需人工绘制,大幅制约制图的自动化程度。本文正是针对这一问题,研究基于机载激光雷达点云数据自动提取建筑物,以期提高地形图测绘的生产效率、降低劳动强度,对于加快整个铁路设计进程具有重要的现实意义[1-3]。
2 基于点云数据的建筑物自动提取方法研究
机载LiDAR技术能够快速直接、连续自动获取地面三维数据。与传统航空摄影测量技术相比,具有对控制测量依赖少、受天气影响小、自动化处理程度高、成图周期短、产品种类丰富等特点。机载LiDAR技术生产大比例尺地形图总体可以分为数据采集、数据预处理、点云制图三个大块。数据采集包括航线设计、地面参考站布设、航空摄影和摄影数据质量检查工作;数据预处理包含航迹数据解算、激光点云处理及检校、坐标转换、点云滤波等步骤;点云制图包括高程点生成、等高线生成、地形要素采集等内容。
基于点云数据地形图中的等高线和高程点已经能够自动生成,而其他地形要素还需要人工采集,特别是城区、乡镇等建筑密集区域,内业作业量非常大,使得整体生产效率低下,研究基于LiDAR生产地形图过程中的建筑边线自动提取前,需要将建筑点云提取出来。建筑物点云提取主要包括地面点滤除、点云分割和点云分类三个步骤。通过点云分类提取出建筑物点云后即可进行建筑边界线的自动提取[4]。
2.1 地面点滤除
机载激光雷达成像过程是对地面全要素进行的非选择性扫描,数据中包含地面、植被、人工构造物等对象的三维点集。为了提取建筑物,应首先滤除地面点,从而降低提取的运算量和难度,提高提取的正确率。目前地面点自动提取已比较成熟,可实现80%以上的正确率。滤除地面点后,点云数据中将只包含非地面数据,基于非地面数据可进行进一步的分割和分类处理。
2.2 点云分割
随着机载扫描系统的不断发展,应用领域越来越广泛,获取到的点云数据量也越来越大,从海量的点云数据中提取特征并进行分类和目标识别难度较大。对点云数据进行分割的目的即化繁为简,将复杂的扫描场景点云根据其几何或纹理特征分割成独立地物点云集合。在对点云进一步处理时,可直接对每个集合进行操作,从而提高点云数据处理的效率和复杂度。
点云分割就是将点云数据分割成若干个互不相交的子集。学术界对点云分割方法进行了多年研究,相继提出了区域增长法、特征图像法和空间特征聚类法等有效方法。
2.3 点云分类
在完成地物特征的表达和选择后,需要选择合适的机器学习模型进行训练,以达到最终的分类目的。支持向量机具有很高的分类正确率,对于拟合也有很好的理论保证。同时如果选取合适的核函数,对特征线性不可分的问题也可以表现得很好。而随机森林具有学习过程快、能够高效处理大数据等优点,并且它对离群值不敏感,在随机干扰较多的情况下依然表现稳健。
(1)支持向量机
支持向量机SVM是Vapnik于1995年基于SLT理论首先提出的一种新的学习方法。通过SRM原则在有限的样本中找到学习能力和学习模型的复杂度的最佳平衡点,并最终转化为求解凸二次规划的问题。同时引入核函数思想,在很大程度上解决了模型选择与过学习问题、非线性与维数灾难问题以及局部极小值问题等。SVM在数据挖掘、模式识别、数据分析、遥感图像分类等领域取得了成功而广泛的应用,是SLT中最有效的方法之一。
(2)随机森林
随机森林是一种采用决策树作为基预测器的集成学习方法,由Breiman在2001年提出。结合了Bagging和随机子空间理论,集成众多决策树进行预测,最后将各个决策树的预测结果进行平均或者投票,从而得到最终的预测结果。大量的理论和实验研究都证明了随机森林算法具有较高的预测准确率,对异常值和噪声具有很好的容忍度,且不容易出现过拟合现象。
2.4 建筑提取实验
本研究对建筑物点云边界的自动提取算法进行了实验验证,采用的是黄冈黄梅高铁LiDAR航飞的数据。设备是集团公司现有的Leica ALS60机载激光雷达测量系统,影像传感器为RCD30中画幅数码相机。选取了整个测段中浠水段的点云数据作为实验数据。原始点云数据如图1所示。
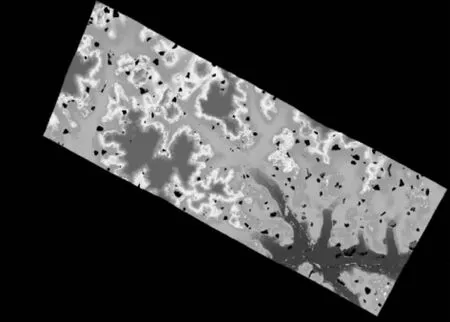
图1 原始实验点云数据
(1)地面点滤除
首先采用terrasolid软件对点云数据进行滤波后,采用本课题提出的算法进行了地面点的滤除工作。
(2)点云分割
原始点云数据经过地面点滤除处理后,即可对非地面点云进行空间聚类分割处理,将离散点分割为独立的地物点集合,不同的颜色代表不同的地物点集合(见图2)。
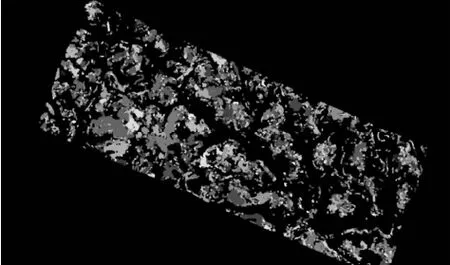
图2 非地面点云分割结果
(3)点云分类
点云数据经过分割后,可以进一步进行点云的分类,将独立的地物集合赋予类别属性。本文地物提取主要针对建筑、植被和桥梁三类对象。首先,采集这三类的样本进行训练,采用随机森林模型进行点云分类,绿色点云为植被,红色点云为建筑。
自动提取出的建筑点云如图3所示,不同的颜色代表着独立的建筑点云集合。利用提取出的经过单体化后的建筑点云数据可进一步进行建筑的边界线提取,以满足基于LiDAR点云数据的自动化生成地形图需求。

图3 点云单体化结果
3 数字线划图中建筑物边界线的自动提取方法研究
在完成建筑点云的提取并单体化后,即可对每块建筑点云自动提取出边界线,用于地形图的自动生成。建筑物轮廓线提取根据应用的不同又分为二维轮廓线提取和三维轮廓线提取[5-7]。
3.1 边界点云提取
建筑边界点云提取一般情况下只需要生成凸包即可,点云的凸包可使用先构造不规则三角网再去三角网边界的方法获取。
采用凸包算法能够提取大部分规则建筑点云的边界,但是对于异形结构的建筑点云数据提取效果不佳。
对于不规则建筑的边界提取还需要采用凹包算法,常用的从点云数据中提取凹包边界的算法有Alphashape算法。
3.2 边界点云简化
提取出建筑物的边界点云后,需要对边界点云进行规则化,进而生成建筑物边界角点,形成建筑物边界矢量图形,从而生产地形图中的建筑物要素。
在单一建筑物内,针对上述步骤获取的建筑物轮廓点,提出了迭代的方法对其进行规则化处理。规则化分为两个步骤,第一步为提取建筑角点;第二步为角点直角化。
建筑物角点提取的基本原理是依据角点的夹角一般为90度。基于这一原理,对建筑物边界点云进行筛选[8]。
3.3 边界点精化
经过边界点云的提取和简化后,已可较为真实地表现建筑物的形状。然而,现实情况中,往往由于激光点云的不完整等原因,导致提取的建筑物边界失真。因此,还需要对提取出的边界点进行精化处理,以提高建筑物边界提取的精度。边界线的精化包含两个步骤,第一步是直线拟合;第二步是边界外延。
由于机载激光扫描获取的点云数据比较稀疏,扫描获取的建筑角点可能距离其真实角点有一定的差距,因此,通过边界拟合直线并通过边界直线相交的方式来获取精确的建筑物角点。算法的具体步骤是分配边界点、边界点直线拟合、寻找最远边界点、直线相交求建筑角点、角点直角化(在实际建筑物的角点并不一定是直角,而在地形图上为了图幅美观,可尽量将建筑物的角点强制转化为直角。这一步骤不是必须的,可根据实际情况来选择)。
3.4 建筑边界提取实验
本研究对建筑物点云边界的自动提取算法进行了实验验证,采用的是整个实验区域测段中溪水段的点云数据作为实验数据。提取的建筑物点云如图4所示,提取的建筑边界如图5所示[9]。

图4 提取的建筑点云数据

图5 提取的建筑边界
3.5 高架路桥边线提取的应用研究
在基于机载LiDAR点云数据制作大比例尺地形图的过程中,除了建筑物需要人工绘制外,高架路桥边线的提取也需要大量的人工干预。因此,在研究了建筑物边界线提取的基础上,对高架路桥边线的自动提取技术也展开了深入研究[10-11]。
(1)高架桥点云提取
高架桥点云的提取步骤和建筑物提取的步骤基本相同,主要包括地面点滤除、点云分割和点云分类三个步骤。唯一的区别是在点云分类的过程中使用的阈值参数不同,一般情况下,高架桥的聚类点云集合长宽比、面积都比较大。
(2)高架桥边线提取
高架桥的边界点提取同样可以采用Alphashape的凹包提取算法,提取步骤和建筑物边界提取相同。
(3)高架桥边线简化
高架桥的边界简化和建筑物的边界简化略有不同,高架桥边界线不存在明显角点,但又不需要过于密集的边界点。因此需要对边界进行简化,简化方法采用道格拉斯-普克简化方法进行高架桥边线简化。该方法可最大限度保持线形的真实度。
3.6 基于点云数据的建筑特征提取精度评价
在完成了基于点云数据的建筑物边界提取后,需要设计相应的应用接口,将提取结果转换为CAD格式对象,使其能够兼容到标准地形图中,并根据相应比例尺的地形图相关规范进行精度评定。从两个方面来验证整个提取精度,一是建筑物的有效提取率;二是提取出边界的绝对精度。有效提取率是将所有正确提取的建筑物除以整个实验范围内的建筑计算所得,本实验区提取率达到91%。通过外业采集房角的方式对建筑物边界提取的绝对精度进行了检查,平面中误差为1.15 m,满足铁路1∶2 000地形图制图要求[12]。
4 结论
本研究基于点云数据在铁路工程大比例尺制图过程中,实现了建筑物边界线自动提取,相比传统作业模式具有以下几个方面的优势:
(1)人工干预少、自动化程度高
将点云数据进行滤波处理后可直接自动生成等高线和高程点。实现建筑物的自动提取后,作业员只需补充采集水系、电力线等少量地物,比之传统作业方法效率大大提高。这样的优势在随着近几年高铁工程建设越来越多、工期越来越紧的背景下显得更加重要。
(2)点云数据高程精度更高
相比于航空数码影像成图,基于点云数据制作的地形图具备更高的高程精度,且高层建筑不存在投影差,测量成果更加可靠。
(3)内业工作量大大减少,整体作业效率高
机载激光雷达系统的内、外业处理工序相比于传统航空影像更少,这将使内业制图的工作量大大减少,整体作业效率大大提高。
猜你喜欢
计算机仿真(2021年8期)2021-11-17
建材发展导向(2021年15期)2021-11-05
计算机系统应用(2020年1期)2020-01-15
电子技术与软件工程(2019年9期)2019-07-12
海峡姐妹(2019年5期)2019-06-18
考试周刊(2018年74期)2018-08-20
电子技术与软件工程(2018年10期)2018-07-16
特别健康·上半月(2017年10期)2017-09-22
郑州大学学报(工学版)(2017年2期)2017-05-18
计算机应用(2016年7期)2016-07-19