
基于Markov的轨道车辆运输联锁系统RAMS分析
2019-07-17 02:18吴丹
价值工程 2019年15期
吴丹
摘要:可靠性(Relability)、可用性(Availiability)、可维护性(Maintiainability)、安全性(Safety),即RAMS,它是轨道车辆运输交通信号系统的关键评估指标,通过对RAMS的评判能够分析轨道车辆运输是否满足需求,本文以RAMS作为重要评估手段,分析了模块故障率和故障覆盖率对系统可靠性和安全性的影响。
Abstract: Reliability, Availiability, Maintiainability, Safety, or RAMS, is a key evaluation indicator for rail vehicle transportation traffic signal systems. Through the evaluation of RAMS, it can be analyzed whether the rail vehicle transportation meets the demand. This paper uses RAMS as an important evaluation method to analyze the impact of module failure rate and fault coverage rate on system reliability and safety.
关键词:Markov;轨道车辆;联锁系统;可靠性
Key words: Markov;rail vehicle;interlocking system;reliability
中图分类号:[U273.1] 文献标识码:A 文章编号:1006-4311(2019)15-0163-03
0 引言
随着我国城市化进程的加速和经济水平的提升,城市轨道车辆运输系统逐步发展进步,其快捷便利的优点能够很好调解城市交通问题。因此,很多城市在交通建设规划中将轨道车辆运输系统作为重要战略目标,同时也是城市交通的主要发展趋势[1]。
计算机联锁系统是城市轨道车辆运输系统的重要组成部分和核心基础。为保障车辆安全,须完全按照设定的联锁机制对各级道路信号进行控制。当前,针对该系统稳定性和容错性的研究已取得较多成果,也得到了深入广泛的应用,为车辆自动控制的自动化水平迈向新台阶奠定了基础。然而计算机联锁系统中采用的人机交互功能较为简易,未配置专用设备,安全性能欠佳,因此,计算机联锁上位机仍需进一步研究和改进[2-3]。
1 计算机联锁系统
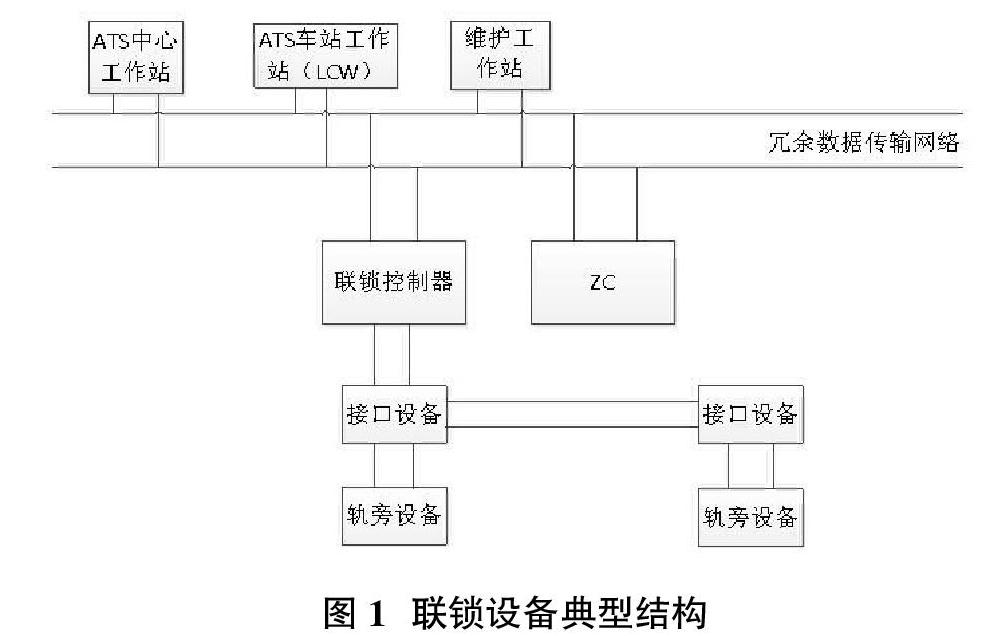
城市轨道交通控制信号是一系列综合系统的统一构成,计算机联锁系统是重要的功能组成[4-6]。其中,联锁控制器的作用是保证联锁功能执行的安全性。结合其他主要设备,包括轨旁转辙机、信号机等,能够有效获取列出实施位置[7-8]。另一方面,为确保计算机车辆控制系统的正确运行,该控制器提供外部接口功能,若数据传输系统、车载控制系统中装置发生故障,则车辆行驶以地面信号为主要控制方式。
在控制中心站中配置联锁系统,图1给出了城市轨道车辆运输中联锁设备配置的典型方案。
针对城市轨道车辆运输的功能要求,联锁系统具备的功能如下:①车辆进入控制方式,包含了通入、保持以及通过解锁。②基础标识装置测控,包含了信号装置和道口控制、轨道区间测试、紧急停靠装置测试、站台自动门禁状态测试、站台车辆停靠装置测试、站台屏蔽层控制等。③其它控制功能,包含了紧急停靠、锁车、自动反措、站台密封及区间密封等。④故障识别预判。
由于内外部因素制约,在实验室条件中,无法构建符合实际情况的信号系统,因此,必须对道口、信号机等各种装置和列出开展仿真研究。搭建的信号装置包括了中央自动车辆运行系统、轨道仿真系统、区间控制装置、若干联锁系统、相应的车载控制系统以及列出本体的仿真环境。
2 RAMS评估指标
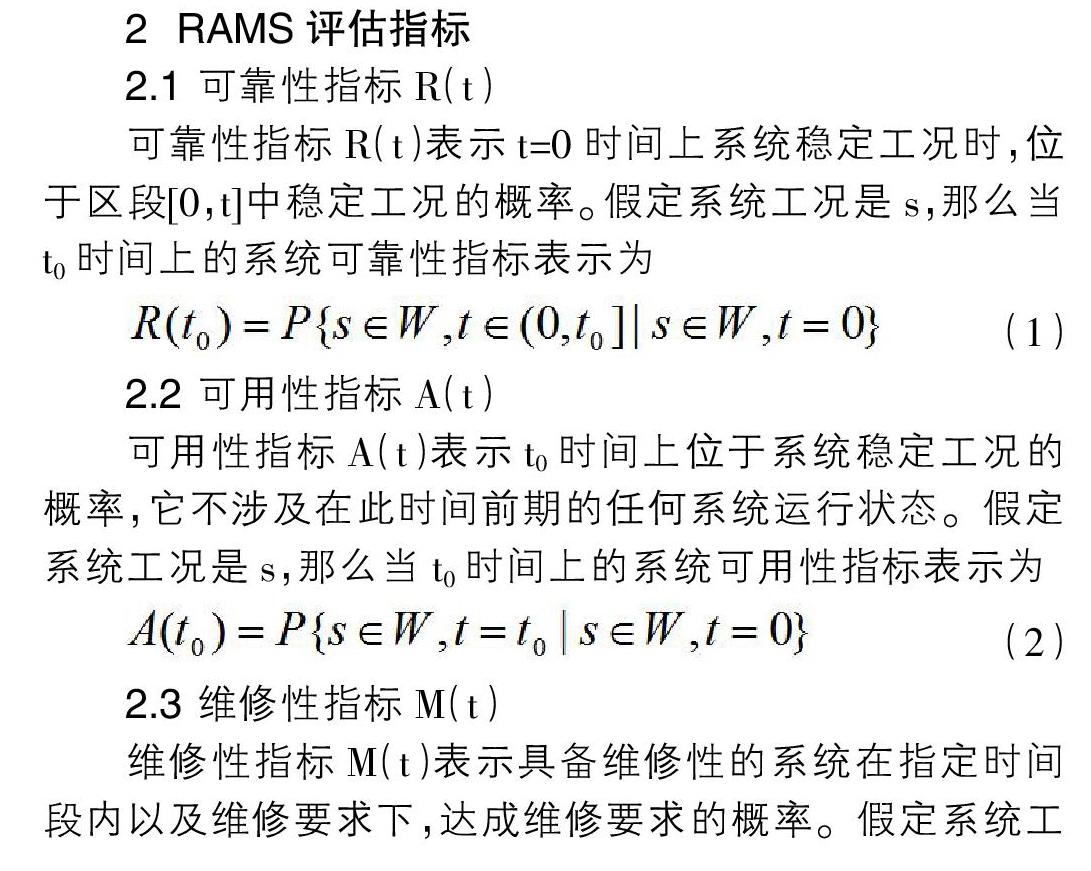
2.1 可靠性指标R(t)
可靠性指标R(t)表示t=0时间上系统稳定工况时,位于区段[0,t]中稳定工况的概率。假定系统工况是s,那么当t0时间上的系统可靠性指标表示为
2.2 可用性指标A(t)
可用性指标A(t)表示t0时间上位于系统稳定工况的概率,它不涉及在此时间前期的任何系统运行状态。假定系统工况是s,那么当t0时间上的系统可用性指标表示为
2.3 维修性指标M(t)
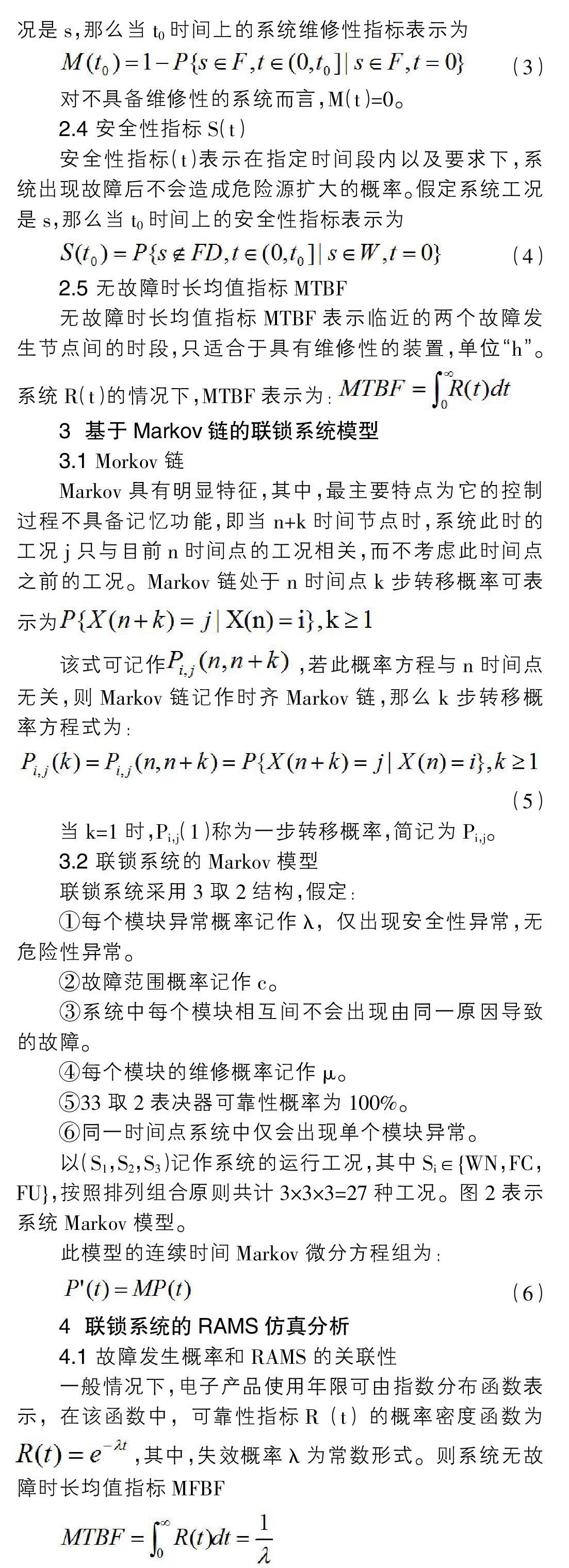
维修性指标M(t)表示具备维修性的系统在指定时间段内以及维修要求下,达成维修要求的概率。假定系统工况是s,那么当t0时间上的系统维修性指标表示为
对不具备维修性的系统而言,M(t)=0。
2.4 安全性指标S(t)
安全性指標(t)表示在指定时间段内以及要求下,系统出现故障后不会造成危险源扩大的概率。假定系统工况是s,那么当t0时间上的安全性指标表示为
2.5 无故障时长均值指标MTBF
无故障时长均值指标MTBF表示临近的两个故障发生节点间的时段,只适合于具有维修性的装置,单位“h”。系统R(t)的情况下,MTBF表示为:
3 基于Markov链的联锁系统模型
3.1 Morkov链
Markov具有明显特征,其中,最主要特点为它的控制过程不具备记忆功能,即当n+k时间节点时,系统此时的工况j只与目前n时间点的工况相关,而不考虑此时间点之前的工况。Markov链处于n时间点k步转移概率可表示为
该式可记作,若此概率方程与n时间点无关,则Markov链记作时齐Markov链,那么k步转移概率方程式为:
3.2 联锁系统的Markov模型
联锁系统采用3取2结构,假定:
①每个模块异常概率记作?姿,仅出现安全性异常,无危险性异常。
②故障范围概率记作c。
③系统中每个模块相互间不会出现由同一原因导致的故障。
④每个模块的维修概率记作?滋。
⑤33取2表决器可靠性概率为100%。
⑥同一时间点系统中仅会出现单个模块异常。
以(S1,S2,S3)记作系统的运行工况,其中Si∈{WN,FC,FU},按照排列组合原则共计3×3×3=27种工况。图2表示系统Markov模型。
此模型的連续时间Markov微分方程组为:
4 联锁系统的RAMS仿真分析
4.1 故障发生概率和RAMS的关联性
一般情况下,电子产品使用年限可由指数分布函数表示,在该函数中,可靠性指标R(t)的概率密度函数为,其中,失效概率?姿为常数形式。则系统无故障时长均值指标MFBF
利用MTBF评估系统失效概率常数值?姿。
假定故障范围概率c=0.95,维修性概率?滋=0.99。
以每个模块的MFBF取4个时段,分别是1年、5年、10年、20年,则故障失效概率?姿分别是1.1×10-4、2.28×10-5、1.14×10-5、5.7×10-6
当时间t=[0,9×104]小时区间中,设定步长t=104,利用MATLAB计算获得可靠性指标和安全性指标。
图3和图4分别给出了可靠性指标、安全性指标改变的大致情况。
其中data1、data2、data3、data4分别表示MTBF为1年、5年、10年、20年时的曲线。
由上述图可知:
①当系统运行在同一时间点时,故障发生概率愈高、则安全性指标和可靠性指标愈小。
②当系统运行在同一时间点时,则安全性指标和可靠性指标的差异数值愈大。
4.2 覆盖率对RAMS的影响
设模块的MTBF=10年,即故障率为?姿=1.14*10-5,维修率?滋=0.99。分别取覆盖率c为0.8、0.9、0.95、0.99,得到系统的可靠度和安全度分别如图5、图6所示。
5 结语
本文介绍了城市轨道交通计算机联锁系统RAMS和Markov链的基本原理,将联锁系统运行工况按照正常运行、故障-安全运行和危险性运行进行区分。以RAMS的评判角度为依据,对轨道车辆运输交通信号系统的关键评估指标进行评估,分析是否满足系统运行需求,同时分析了模块故障率和故障覆盖率对系统可靠性和安全性的影响。
参考文献:
[1]谢宝峰.车站计算机联锁系统的现状与发展[J].交通运输系统工程与信息,2004,4(4):86-90.
[2]谢文站.国产计算机联锁系统的发展现状[J].铁路通信信号工程技术,2008,5(1):51-53.
[3]卜长堃,赵志熙,高继祥.我国铁路计算机联锁发展的启示与展望[J].中国铁路,2012,3:36-37.
[4]李开成,卜长堃,毛俊杰.国外铁路通信信号新技术纵览[M].中国铁道出版社,2005.
[5]何文卿.6502电气集中电路[M].中国铁道出版社,2006.
[6]赵志熙.微机联锁系统技术[M].中国铁道出版社,1995.
[7]高继祥.铁道信号运营基础[M].中国铁道出版社,1998.
[8]范旋.铁路信号计算机联锁与电气集中联锁的比较[J].信息技术与信息化,2013,2:80-81.
猜你喜欢
装备制造技术(2020年12期)2020-05-22
上海质量(2019年8期)2019-11-16
电子制作(2017年2期)2017-05-17
山东工业技术(2017年7期)2017-04-10
山东工业技术(2017年6期)2017-03-28
科技传播(2016年7期)2016-04-28
电测与仪表(2015年6期)2015-04-09
制造技术与机床(2015年10期)2015-04-09
风能(2015年9期)2015-02-27
