C-V2X测试标准分析及测试方案设计综述
2019-07-16 01:08:52汤利顺赵萌边泽宇李长龙张东波
汽车文摘 2019年7期
汤利顺 赵萌 边泽宇 李长龙 张东波
(中国第一汽车集团有限公司 智能网联开发院,长春 130013)
主题词:C-V2X 无线性能 协议一致性 测试场景 评价准则
缩略语
V2X Vehicle to Everything(车联网)
IoT Internet of Things(物联网)
V2V Vehicle to Vehicle(车与车)
V2I Vehicle to Infrastructure(车与基础设施)
V2R Vehicle to roadside unit(车与路侧单元)
V2P Vehicle to pedestrian(车与行人)
V2N Vehicle to Network(车与互联网)
DSRC Dedicated Short Range Communications(专用短程通信技术)
C-V2X Cellular-V2X(蜂窝通讯)
3GPP The 3rd Generation Partnership Project(第三代合作伙伴项目)
CSAE China Society of Automotive Engineers(中国汽车工程学会)
LTE Long Term Evolution(长期演进)
CCSA China Communications Standards Association(中国通信标准化协会)
OBU On-Board Unit(车载单元)
RSU Road Side Unit(路侧单元)
SDU Service Data Unit(服务数据单元)
RLC Radio Link Control(无线链路层控制协议)
RRC Radio Resource Control(无线资源控制)
PDCP Packet Data Convergence Protocol(分组数据汇聚协议)
MCS Modulation and Coding Scheme(调制与编码策略)
HARQ Hybrid Automatic Repeat request(混合自动重传请求)
DSM DSRC Short Message(DSRC短信息)
DSA DSRC Service Advertisement(DSRC服务信息)
BSM Basic Safety Message(车辆基本安全消息)
RSI Road Side Information(路侧信息)
SPAT Signal Phase and Timing Message(信号灯信息)
GNSS Global Navigation Satellite System(全球导航卫星系统)
HMI Human Machine Interface(人机交互)
ICW Intersection Collision Warning(交叉路口碰撞预警)
LOS Line Of Sight(视距范围内)
NLOS Non Line Of Sight(非视距范围内)
TTC Time To Collision(碰撞时间)
1 前言
随着汽车网联化技术研究的不断深入,V2X作为一种新兴的网联通信技术早已得到业界的广泛认可。这种基于万物互联(IoT)的概念,主要是指车和外界的信息交换,是一系列车载无线通信技术的总称。
V2X一般包括5大类:车与车互联(V2X)、车对路侧设备(V2R)、车对基础设施(V2I)、车对行人(V2P)以及车对网络(V2N)。
在V2X的通信技术手段上,目前主要有两大阵营:其一是美国和高通芯片商支持的DSRC(Dedicated Short Range Communication)专业短程无线通信技术,该技术主要标准由IEEE和SAE两大标准组织制定;另一项是由中国和大唐华为芯片商支持的CV2X(Cellular-V2X)基于蜂窝通信的无线通信技术。DSRC技术可以实现几十米区域范围内移动目标识别及双向通信,可以实现车与车、车与路之间的对话,目前这种技术比较成熟,已达到了商用化阶段。而相对于DSRC,C-V2X在通信容量、覆盖度、高速移动场景、网络可靠性、频率资源利用率和基础设施支持程度上都具有更高的优势,且它具备长期演进的特点[1]。
2018年1月,国家发改委发布的《智能汽车创新发展战略》(征求意见稿)[2]文中提到,2020年C-V2X覆盖率将达到90%。而作为技术成熟和具备商业化应用的前提,C-V2X的评价标准及测试验证手段也是非常关键的。本文主要对C-V2X的测试标准进行了分析以及对测试方法进行了描述。
2C-V2X标准分析
2.1 开发标准
C-V2X标准主要可以分为两部分:3GPP定义的底层通信协议以及上层基于应用及通信场景定义的通信标准,协议架构详见图1。

图1C-V2X标准架构示意图
3GPP定义的标准覆盖物理层及数据链路层通信协议,其中TS 36.211和36.212分别定义了空中接口的无线物理通道和无线接入控制协议[3-4]。RLC,PDCP:分组数据汇聚协议属于无线接口协议栈的第二层,处理控制平面上无线资源管理消息以及用户平面上的协议数据包,同时还向上层提供按序提交和重复分组检测功能,为用户提供一个无损的无线环境。
网络层:GB/T 31024.3—2019[5]定义了可适配不同物理层的技术要求,以适应各种不同的网络资源来满足复杂交通场景下的通信需求。包括终端最大运动速度不小于120 km/h的强移动性支持,可以支持多种无线接入层,安全相关业务端到端传输延迟小于50 ms的时延要求,基于业务优先级的服务质量保证的技术要求。
应用层:CSAE通过团标T/CSAE 53-2017[6]定义了应用层技术规范化和应用层数据交互接口,使车车互联有了统一的交互语言和文字,标准中提出了一个“应用数据交互层(Application Data Switch)”的概念,它构建了一个基础平台,负责应用数据编解码和交互控制,最终实现具体应用场景和底层交互技术之间的隔离。
以SAE J2735[7]作为参考,中国汽车工程学会组织20家企业在40个V2X场景中选取了17个作为1期示范应用,其中包括12个安全类应用,4个效率类,1个信息服务类。同时车企也可以制定自己的应用场景。
2.2 测试标准
3GPP产业联盟规定了底层通信性能测试规范,除此之外,国内多个组织、标准协议和研究中心根据自身的特点及定位也编制了相应测试规范,详见表1的标准划分。

表1 测试标准架构解析
3GPP在TS 36.521系列规范中定义了底层无线通信性能测试、无线资源管理一致性测试以及协议一致性测试的流程及技术要求[8]。
中国IMT-2020(5G)推进组针对CSAE颁布的网络层及应用层技术要求开发了相应的试验室环境下的测试规范,涵盖了数据格式、数据内容、时延性能及定时参数等要求。
针对功能场景,组织开发了基于场景的测试规范,分为安全应用类场景测试、交通效率提升类应用场景以及信息娱乐服务场景类应用。同时主机厂根据自身的要求及特定场景也会制定相应的测试规范。
3 试验室内测试方案设计
3.1 射频及无线通信性能验证
由于汽车运动性以及行驶地域不受限,导致汽车周围无线电磁环境相较于传统手机等消费电子更加复杂,所以对V2X终端的射频性能进行验证是非常关键的;同时V2X涉及到的互联车辆不分品牌,所以在路上行驶的车辆都可以互联互通,传递位置速度的状态信息,因此协议一致性的验证也是很重要的。以上测试内容一般都在试验室环境下进行,保证底层协议的正确性和稳定性后,才会执行后续的外场功能验证[9]。
3.1.1 射频指标测试
射频性能测试不仅考察终端射频芯片指标,更能对终端进行整机测试,考察整机的性能。对性能测试的总体目标是无论对于车载单元OBU(On-Board Unit)还是路侧单元RSU(Road Side Unit)都能够产生符合标准要求的有用信号,同时把无用发射控制在一定水平之内。
C-V2X射频指标测试主要关注5个技术参数,测试技术指标参考3GPP TS 36.101[10],主要包括:
最大发射功率:考察终端的发射功率是否符合标准,如果过大会影响同频段的其他设备,如果过小又达不到规定的覆盖范围;
频率范围:是指设备工作时的频率范围,它是由功率包络下的最高频率fH和最低频率fL决定的,根据《车联网(智能网联汽车)直连通信使用5 905~5 925 MHz频段的管理规定》定义,频率使用范围限值为 fH≤5 925 MHz,fL≥5 905 MHz[11];
占用带宽:主要用于检验发射机的发射带宽是否超出其正常工作的频谱范围,以避免对其他通信系统造成干扰。这项测试与最大发射功率类似,一个在幅值上,一个在频谱上,OBU和RSU终端占用带宽应小于等于10 MHz。
频谱发射模板:频谱发射模板测量偏移载波中心频率在2.5~12.75 MHz范围内的频谱杂散能量[12];
杂散发射:杂散发射是指除带外杂散以外由谐波发射、寄生发射、互调产物及频率转移产物等产生的非期望发射,这项指标更需要进行严格的限制,否则会对其他用户系统造成严重的干扰。
对以上射频指标需要使用特定的综测仪、频谱分析仪、屏蔽箱进行专门的测试,测试系统的原理框图如图2所示。
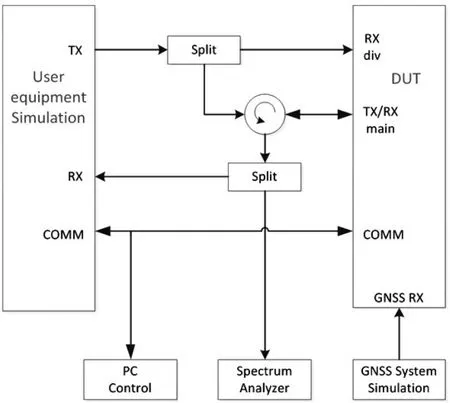
图2 射频指标测试系统
目前主流的车载天线模块都是2×1 MIMO的收发模式,图2中User Equipment Simulation仿真设备发射信号需要通过复制分发到被测单元的两个输入端。同时频谱仪实时收集无线信号并进行分析。以上为了排除外界电磁干扰,将DUT和附属连接线放置在屏蔽箱内。具体的各个项目的评价指标见表2,其中频谱发射模板及终端设备杂散发射指标参见标准3GPP TS 36.521中定义。
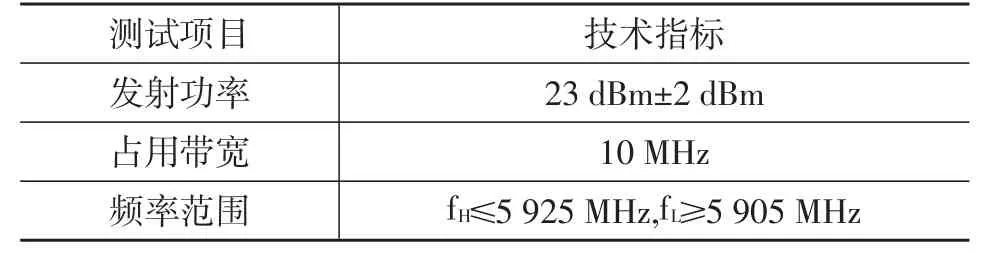
表2 无线射频评价指标
3.1.2 通信性能测试
通信性能测试主要考虑将车辆真实的无线信道环境引入到测试系统中,验证系统在多种信道场景下仍然能够进行正常通信。这一项目主要是对终端设备进行整机测试,考察整机的系统级性能。信道模型既可以包括3GPP标准定义的模型,也可以自定义更加复杂苛刻的信道模型,同时在实车实验之前或者暂不具备整车试验的条件下,无线性能测试能够更好的反应系统对无线电磁环境的适应能力。测试系统的原理如图3所示。
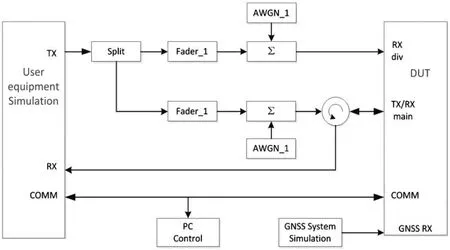
图3 无线通信性能测试系统
通信性能评价指标包括系统时延和分组丢失率。其中时延参数是指从数据分组到达应用层服务数据单元SDU入口开始,到数据分组到达接收侧应用层服务数据单元出口所经历的时间差;分组丢失率是指在特定的信道条件下,接收机丢失应收到数据分组的概率。具体参数见表3。

表3 通信性能评价指标
3.2 互联互通测试
互联互通测试是偏向于底层通信协议一致性的测试方向,主要验证RLC无线链路控制协议、PDCP分组数据汇聚协议以及信令层RRC远程资源控制协议的兼容性。由于V2X技术想要达到一定的渗透率,需要所有车厂按照统一的协议规则进行技术开发与实现。所以不同厂家至今的互验证是非常有必要的。
互联互通测试环境可以分为两种,商用网络测试环境和试验室测试环境,测试内容不尽相同。在调试和开发初期,主要在试验室环境下更加高效和及早发现问题。试验室环境下根据测试系统的组成也可以分为两种:测试系统环境和被测件互验证环境。试验室下测试系统详见图4,其中用户设备仿真是基于软件在环模拟下的测试环境。也可以将两个被测单元同时连接,完成一发一收的同步验证。图中的Control Unit用于实现参数配置、数据监控以及分析定位等功能[13]。
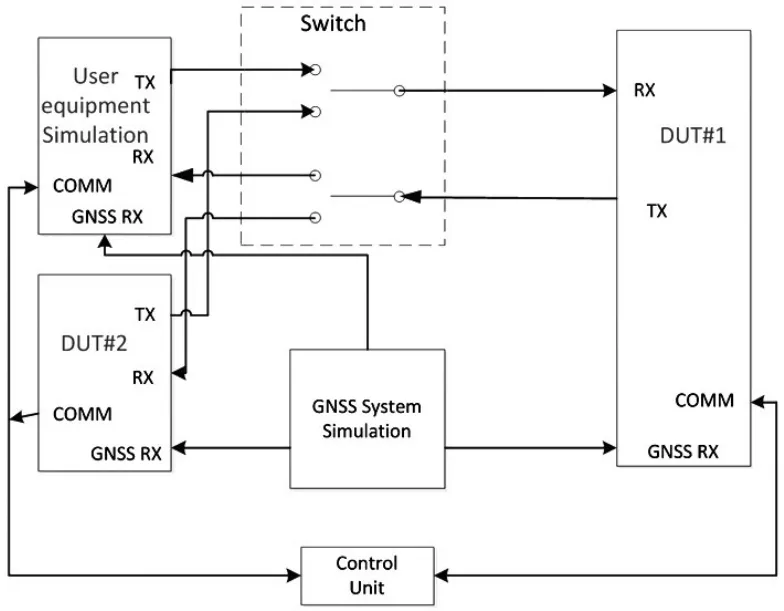
图4 互联互通协议测试系统
测试内容包括子信道数目/MCS/HARQ发送及接收测试、RLC分段重组功能发送和接收测试,以及RRC信令格式及发送机制相关的测试项目。
3.3 网络层及应用层协议一致性测试
网络层定义了两种消息实体:DSM(DSRC Short Message)消息和DSA(DSRC Service Advertisement)消息,测试内容包括被测单元能够正确发送和接收有效的网络层消息,同时能够有效忽略非法消息。
应用层在一个标准数据结构中定义了5种消息实体:BSM(Basic Safety Message)车辆基本安全消息,是使用最广泛的一个应用层消息,用来在车辆之间交换安全状态数据,车辆通过该消息的广播,将自身的实时状态告知周围车辆,以此支持一系列协同安全等应用;MAP地图消息,由RSU广播,向车辆传递局部区域的地图消息;RSI(Road Side Information)由RSU向周围车载单元发布的交通事件消息以及交通标志标牌消息,此消息中既包含标志标牌内容,也可以包含一些临时的紧急道路状态信息;RSM(Roadside Safety Message)路侧安全消息,RSU通过本身拥有的传感及监测手段,得到周边的交通状态信息,并将信息整理成RSM定义的数据结构;SPAT(Signal Phase and Timing Message)信号灯消息,包含一个或者多个路口信号灯当前的状态信息。同时结合MAP消息,为车辆提供实时的前方信号灯状态信息。
测试系统框图参考互联互通测试示意(图4),但是需要注意测试前需要满足如下技术条件:测试环境周围没有其他类测试广播设备;测试前无线通信接口已初始化完成,同时必须在上位机控制端控制下才能发送消息;GNSS设备能够动态仿真被测单元的位置信息,动态范围满足测试要求;测试系统和被测件之间安全链接需提前完成,且互相之间不设置任何防火墙。
测试的具体内容及要求可参见相应的测试规范,同时主机厂也可以在标准基础上开发定制的测试用例,用以完成更高覆盖度的测试。
4 外场功能测试
V2X车载终端包括无线通信模块,信号处理单元以及HMI交互接口。无线通信模块负责车与车(PC5)、车与云端(Uu)之间进行通信,信号处理单元负责对接收的附近车辆状态进行处理,识别出危险车辆或危险工况,HMI交互接口负责在发现危险情况下对驾驶员进行提醒。CSAE在第一期示范应用场景中定义了12个安全类场景。以“交叉路口碰撞预警”说明外场测试的整体流程。
交叉路口碰撞预警(Intersection Collision Warning,ICW)是指,当车辆驶向交叉路口时,与侧向驶向交叉路口的车存在碰撞危险时,ICW应用能够对双方驾驶员进行预警,避免或减轻侧行碰撞,提高交叉路口的通行安全。应用场景包括但不限于交叉路口、环道入口、高速路入口等场景。
外场实车测试具有一定的危险性,并且对无线通信环境有较高的要求,建议在有资质的试验场进行测试,尤其是在有相应场景的路段下测试。针对V2X特点,测试可以分为LOS(Line of Sight)视距范围内和NLOS(Non Line of Sight)非视距范围内,具体的测试参考图5、图6所示。图5是在交叉路口有建筑物遮挡下的测试工况,同时仿真有多个危险车辆同时存在时,考察主车的识别及优先级判断能力。而图6所示为
有车辆遮挡下制造NLOS的工况。而对于V2X的主流应用,非视距下的提醒是它最大的优势。
设计规范定义了最大绝对车速为70 km/h,据此定义了表4中的测试工况。其中TTC(Time To Collision)碰撞时间判断是目前不论是自主式预警还是基于V2X车路协同式预警广泛采用的判断指标。其中的指标参数是根据车辆动力学模型计算得来的。指标参数仅供参考,也可以在测试过程中逐渐优化。
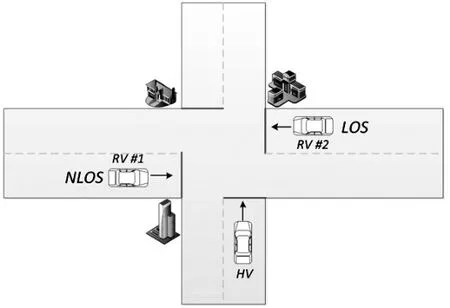
图5 建筑物NLOS和LOS

图6 车辆遮挡NLOS
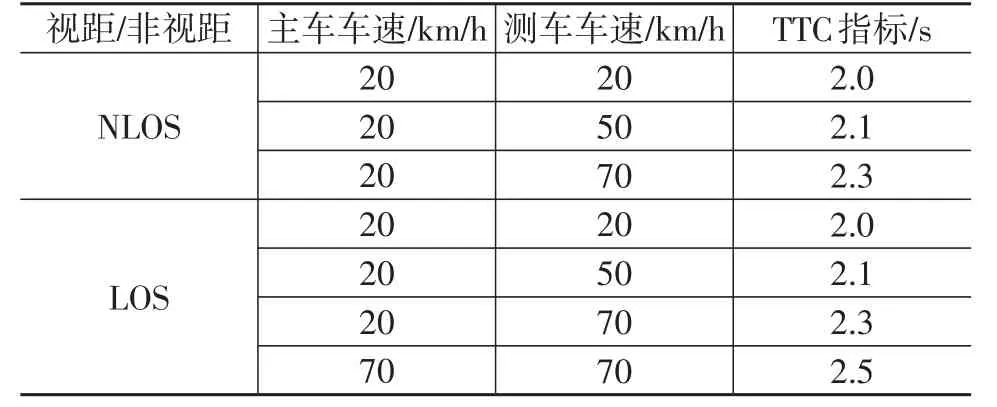
表4 ICW测试工况及评价指标
测试流程描述如下:
Step1:测试前确保主车和侧向车辆通信正常,车辆刹车系统功能正常;
Step2:主车沿路口直线正向以20 km/h行驶,侧向车辆按照表4中规定车速行驶;
Step3:记录主车ICW功能报警时间,同时记录TTC碰撞预警时间;
Step4:当TTC碰撞时间小于2 s时,紧急采取制动或者避让以避免发送碰撞;
Step5:测试技术。
针对每个测试工况,重复执行一定的次数,只有每次TTC碰撞预警时间都大于规范定义时间时,才算测试通过。同时可以计算标准差等参数对功能进行进一步的细致评价。
5 结论及启示
C-V2X作为车联网车路协同框架下的一种主流技术方案,在国内外已得到多家主机厂的支持,国内像上汽、一汽、长安都公布了产品的开发及量产计划。2020年会是V2X应用元年。而制定能够保证产品稳定可靠的测试技术就显得尤为重要。
在通信测试方面,主要分为射频指标、无线性能、互联互通及协议一致性测试。多个标准组织也释放了相应测试标准,但目前多个标准相互重叠,架构不清晰,亟需组织间加强沟通,尽快推出国标。同时应加强信道干扰技术的研究以及协议一致性的测试覆盖度,因为C-V2X是一种基于无线通信的车载安全应用,对于通信链路的抗干扰性及稳定性能直接关系到功能可用性,同时针对不同品牌、不同型号的车辆都需要互联互通,所以正确解析接收到的信息同时不影响伙伴节点是V2X终端的基本要求。
在功能验证方面,需要借助专业的智能网联测试场地,充分发掘每个场景的测试工况,如文中提到的ICW场景除正向功能外,还需要考虑避免误报场景的验证,因为终端需要能够过滤无碰撞威胁的物体,如果误判率过高,不仅会使驾驶员产生厌恶,也可能使驾驶员倦怠,即使出现真正的险情,也无法做出应对措施。所以功能验证场景验证的设计方法及设计准则也是今后研究的一个方向。
综上,C-V2X的测试验证对于国内来说,正处于测试方法研究和测试系统开发阶段,测试标准的规范化,测试技术的深入化以及测试系统及测试场景开发都是未来几年需要重点关注的内容。同时也为5G NR V2X和自动驾驶做技术储备。
猜你喜欢
无线互联科技(2021年4期)2021-04-21 10:12:36
小猕猴智力画刊(2019年3期)2019-04-19 00:01:52
电子制作(2018年23期)2018-12-26 01:01:08
小太阳画报(2018年3期)2018-05-14 17:19:26
电子制作(2016年15期)2017-01-15 13:39:03
阅读与作文(小学低年级版)(2016年12期)2016-12-22 19:35:04
少年博览·小学低年级(2016年9期)2016-11-24 06:21:37
山东青年(2016年1期)2016-02-28 14:25:25
汽车文摘(2015年11期)2015-12-02 03:02:53
当代修辞学(2014年3期)2014-01-21 02:30:44