
星上剩磁对惯性传感器的影响
2019-07-12 08:10柴国志张冠茂
中国光学 2019年3期
柴国志,黄 亮,乔 亮,张冠茂
(1.兰州大学 引力研究中心,甘肃 兰州 730000;2.兰州大学 磁学与磁性材料教育部重点实验室,物理科学与技术学院,甘肃 兰州 730000;3.兰州大学 信息科学与工程学院,甘肃 兰州 730000)
1 引 言
纵观整个人类文明史,人类从未停止对宇宙的观测,从最早的人眼观测到之后的天文望远镜观测,再发展到后来的射电望远镜等观测手段。这些技术手段都是利用电磁波作为探测对象和探测手段。利用电磁波作为观测宇宙的工具已经有相当一段时间,这类技术发展至今已越来越成熟。然而,引力是许多宇宙演化过程的最根本作用,由于其相互作用本身极其微弱,在过去很长一段时间内无法直接测量引力对时空曲率的改变,即实现引力波的直接探测[1]。直到2015年地面基于激光干涉的引力波观测仪(LIGO)直接观测到了引力波信号[2],这是人类第一次直接观测到引力波信号,更是验证了广义相对论对引力波的预言。LIGO主要针对的是高频引力波信号的探测(>10 Hz),这使人们能够直接探测到引力波天文学的高频区域,高频区域的引力波主要针对恒星系统产生的引力波信号。然而,从天文学角度考虑,引力波探测需要研究更大特征质量的波源,而地面探测由于受各种地表震动等的影响,其测试频段受到限制。因此需要在太空中的超净环境下进行更低频段的引力波探测,从而对几十到几百万太阳质量双黑洞合并、以及致密双星系统合并和早期宇宙来源等进行观测[3]。欧洲空间局和美国国家航空局已经启动了空间引力波探测计划(LISA),并于2016年发射了探路者号验证星(LISA-Pathfinder)[4-6]。我国也启动了由中国科学院牵头的“太极”计划和中山大学提出的“天琴”计划来对空间引力波进行探测[7-10]。
由于缺乏大气层的屏蔽,处于悬浮状态的检验质量(TM)受到宇宙射线的直接辐射,射线中的带电粒子如α粒子、质子等将使TM不断充电。带有电荷的TM将受到来自周围极板的静电库伦力和星际磁场的洛伦兹力[11]。额外的电磁噪声将极大地影响引力波测量精度,同时对卫星的无拖曳控制也会产生一定的干扰。在一些实验中,电磁干扰甚至会成为实验的主要噪声来源。
此外,由于TM不可避免地会有一定的剩余磁化强度,处在磁场和磁场梯度中时会受到磁场力的作用[12]。其中磁的影响主要来源于卫星周围的磁场,由星际磁场、电子元件和其他部件产生,如推进器、电池、太阳能电池板等。为保证引力波的正常探测,环境磁场梯度也必须控制在一定范围内。欧空局LISA项目已经通过地面和空间实验研究了TM磁特性(M和χ)的影响[13-14]。然而,对于TM所处位置的磁场环境(磁场梯度)需要仔细评估,在任务执行期间还需要不断修正其他载荷对磁场的影响。为此,LISA都需要放置一套高精度磁传感器用来测试环境磁场,以便从整体的加速噪声中降低低频磁噪声的影响[12]。在LISA-Pathfinder任务中磁场噪声的预算值为1.2×10-14ms-2Hz-1/2,占总噪声预算的40%。因此有必要对空间引力波探测中的磁场噪声进行分析,以进一步降低总噪声参考。
本文将从以下几个方面进行详细的介绍和论证:(1)星上磁场对惯性传感器加速度的噪声贡献;(2)卫星部件剩磁与卫星平台磁预算控制;(3)实时磁场探测系统与可替代传感器讨论。
2 星上磁场对惯性传感器加速度噪声贡献
星上剩磁所造成的量化噪声可以分为以下几个部分:(1)磁场波动产生的噪声;(2)磁场梯度波动产生的噪声;(3)交流磁场产生的噪声;(4)与TM剩余电荷作用产生的洛伦兹力噪声。星上剩磁对惯性传感器的加速度噪声贡献与TM的质量、磁化率、剩余磁矩等参数密切相关,因此需要先知道TM的各种基本参量。参考LISA-Pathfinder中TM的各种参数[12],如表1所示。下面就上述4种噪声分别展开讨论。
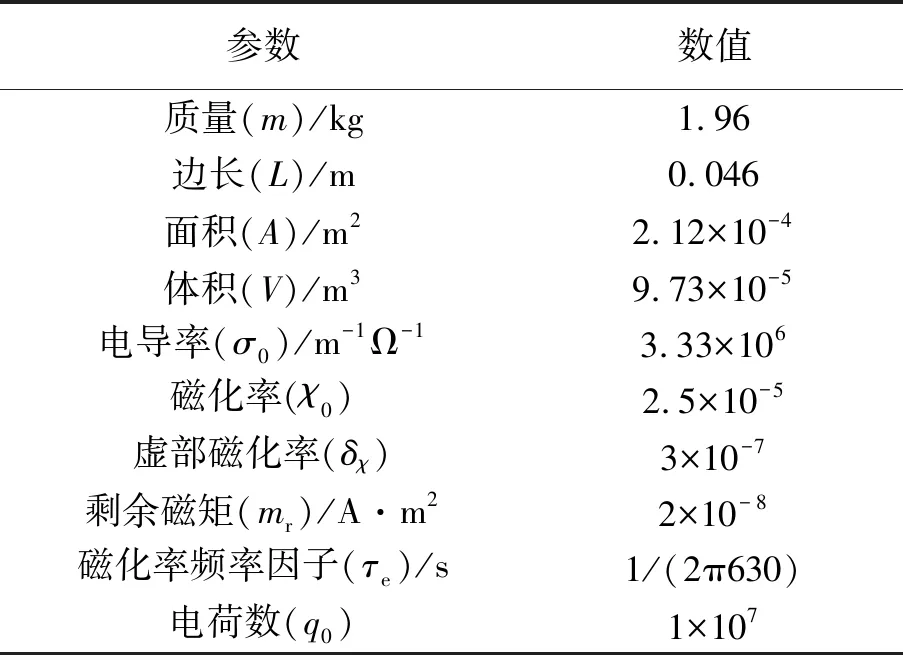
表1 LISA-Pathfinder检验质量基本参数[12]Tab.1 Basic parameters of TM of LISA-Pathfinder
2.1 磁场波动产生的噪声
由于TM磁化强度不为零且具有一定的磁导率,磁场梯度会对其产生非重力扭矩。等效的力和扭矩大小如下所示:

(1)

(2)


(3)
考虑到实际测量中只有测试敏感轴方向的加速度会有影响,因此只考虑敏感轴方向(x轴)的加速度,并且假定空间数据中3个轴的磁场分量相等,这时,可以给出敏感轴方向的加速度噪声为:
(4)

(5)
其中χ0为随频率变化的TM磁化率,L为TM边长,μ0为真空磁导率,σ0为TM的电导率,f为频率。
2.2 磁场梯度波动产生的噪声
利用前面所给的公式可以得到磁场梯度噪声大小为:

(6)

2.3 交流磁场产生的噪声
这部分噪声主要由不同磁场源之间的磁场和磁场梯度噪声耦合产生。比如,考虑磁场随时间的变化为正弦函数,当两个或多个频率接近的高频磁场源共同作用在TM上时,有可能产生低频噪声,从而对低频加速度噪声产生影响。假定这部分影响主要是由卫星平台的不同组成部分的电流产生的。这时需要考虑每个磁场源的影响,可以把磁场分为不随时间变化的B0和随时间变化的部分(利用频率依赖的磁化率τ和B0乘积来表示)。经过一系列推导后可以得到交流磁场对加速度的贡献为:
(7)
其中,l0是特征长度,数值为3.5 m;mTM是TM的质量;A0是静态磁化率;τi和τ0为磁化率的频率因数。对于PtAu合金的TM,其衰减频率为630 Hz,因此取τe=1/(2π630)。
2.4 洛伦兹力噪声
经过推导得运动的带电粒子在磁场中所受到的洛伦兹力的贡献可以表示为:
(8)

2.5 磁场噪声
根据噪声传递公式知,总的磁场噪声应当是各部分噪声的平方和开根号形式。其中直流磁场和磁场梯度噪声均来源于卫星平台之间的相互关联;星际磁场波动和洛伦兹力之间也有耦合。因此,最终的总磁场噪声表达式为:
(9)
参考LISA-Pathfinder任务相关参数,如表2所示。将表2数据代入上述各个噪声计算公式中,可以得到整体噪声预算如表3所示。从表3可以看出,磁场噪声中星际磁场波动对加速度噪声贡献最大,其次是交流磁场的贡献,之后是卫星磁场梯度和卫星磁场波动的贡献。在设计卫星平台时至少也要达到LISA-Pathfinder的卫星平台对剩磁的控制水平,下一部分将介绍如何对卫星平台磁场进行建模及模拟分析,并对各磁场源提出磁预算。

表2 LISA-Pathfinder任务中各磁场源数值[12]Tab.2 Magnetic sources of LISA-Pathfinder mission
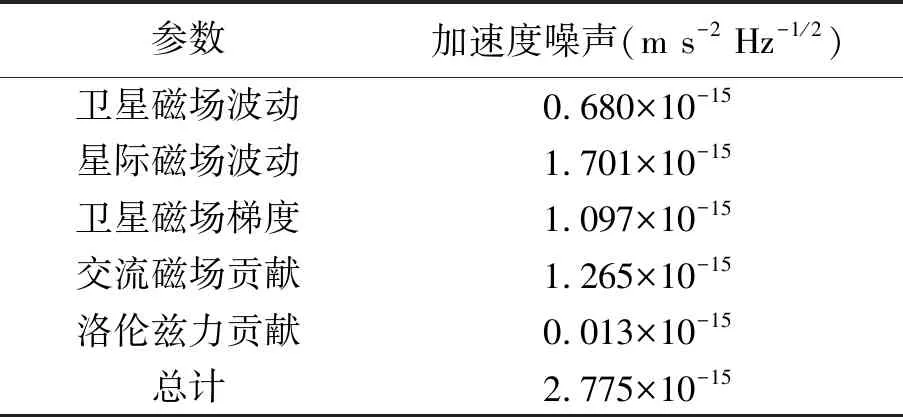
表3 各类磁场噪声源对加速度噪声贡献[12]Tab.3 Contribution of various types of noise sources to the total acceleration noise
3 卫星平台剩磁控制
进行卫星平台的剩磁控制,即在卫星设计之前就对卫星中各个元器件的加工以及材料选择上提出要求,比如,尽量用无磁性材料代替铁磁性材料,在电线布线时采用补偿设计方案,以及在卫星平台部件摆放时利用磁补偿的方案进行控制等。本文主要介绍卫星平台的磁场计算模拟方法以及可能的降低卫星平台剩磁的方案。
3.1 卫星平台磁场计算模拟方法
在卫星平台中,各种磁性材料以及线圈等均会对卫星平台的磁场产生影响,从而影响卫星指定区域的磁场。比如在空间引力波探测中若对TM处的磁场产生影响,就会对TM的加速度噪声产生影响。研究卫星平台中的磁场源,可以把每个部件等效为单个或者多个磁偶极子来处理,进一步计算出卫星平台的静磁场分布[15-16]。
考虑到空间中的一个偶极子的磁矩为m,这时,这个磁偶极子在空间中产生的磁场可以用下式表示:
(10)
其中,R是从偶极子到所求点的位移矢量值。磁感应强度为B=μ0H,μ0是真空磁导率,H为磁场强度。这时可以得到在笛卡尔坐标系下的B分量形式:

(11)
磁感应强度梯度可以由下式得到:
(12)
以上公式是针对单个磁偶极子产生的磁场,当卫星平台中有多个磁偶极子源时,将所有磁偶极子源在敏感位置的磁场进行算术叠加即可得到卫星平台整体的磁场分布。
需要指出的是,对于距离敏感区域比较近的磁场源,用单磁偶极子近似则会引入很大误差。这时需要考虑磁化强度在磁场源中的分布。一个简单的方法(欧洲空间局K.Mehlem博士提出)是将磁场源等效为多个磁偶极子来处理[17]。在该方法中,假定所有的磁体都可以用多个磁偶极子来等价,根据实际需求选择合适的磁偶极子数量以及合适的磁偶极子密度,就可以将磁体等价为一周或者多周的多个环形排布的磁偶极子。由于磁偶极子周围的磁场正比于磁偶极子的大小,因此可以通过近距离测试磁体周围不同位置的磁场大小通过矩阵变换来标定多偶极子的大小。
另外,也可以利用有限元分析软件对卫星平台的磁场分布进行有限元模拟分析,可能用到的有限元分析软件如Comsol Multiphysics的AC/DC模块、Ansys的Maxwell电磁模块、CST EM Studio等进行有限元建模分析。由于有限元方法相当于把每个单元划分为了更多的小单元,因此比上述方法具有更高的精度,但在整星尺度下进行有限元模拟分析可能会增加运算服务器的计算量和计算负担。
3.2 卫星平台剩磁控制方案
空间引力波探测过程中,卫星平台磁控受以下几部分的影响[18]:
(1)姿态轨道控制系统(AOCS)对磁矩的要求;(2)惯性传感器和降噪系统对磁场和磁场梯度的要求;(3)惯性传感器和降噪系统对磁场变化率的要求。
为了使得外磁场最小化,最直接的手段是尽量减小铁磁分量的数值,尤其是永磁体和电磁阀的大小和数量,以及在电线走线过程中的圆形布线形式。
由于整体平台的磁场和平台的大小以及整体平台中的磁场源数量有关。故可以将其分解为不同的单元或者部件组合进行分析设计。如果设计中需要某个单元的磁矩严格补偿,那就需要想办法调整其中磁场源的方向来达到补偿效果。
通常,设计中对磁场的要求应当是对离敏感区域一定距离下的磁预算要求。由于空间引力波项目对磁场梯度和磁场波动提出了额外要求,因此也需要各部件的提供方对这方面采用统一的测试方法进行测试表征。
在设计过程中,可以通过以下方法对磁场进行优化:(1)对所有的部件、器件和子系统提出磁预算要求;(2)在设计中尽量删除不必要的设备;(3)尽量避免使用永磁体;(4)限制软磁材料的使用;(5)对电流导体和地线进行统一设计,避免杂散磁场的贡献;(6)对每个部件进行磁测试表征;(7)太阳能帆板需要尽可能采用无磁设计从而降低磁场大小。
在设计过程中,应当严格遵守以下的设计方案,以降低或优化最大磁场。
磁场源可以分为由磁性材料产生的磁场,包括永磁体产生的磁场或者预磁化的软磁材料产生的磁场和直流或者交流电流产生的直流或交流磁场。
永磁场部分应尽量避免使用永磁体,比如继电器、电磁阀等;另外,还要选择合适的材料,尽量避免使用含磁性元素的材料。尽管有些部件可以通过退磁来实现零剩磁,但在使用过程中还有可能被磁化。
电流产生的直流和交流磁场:
这部分磁场正比于线圈面积、电流大小和线圈匝数。尤其是继电器和电磁阀会有多匝线圈,故应当尽量避免使用。除此之外还应当满足以下条件:(1)尽量减小电流的大小;(2)尽量减小线圈的面积,并且在布线时需要成对的布置回路线缆。在电缆中尽量使用双绞线。因为双绞线中电流相等,方向相反,可以实现减小线圈面积和抵消线圈磁场的作用。在卫星平台布线和内部布线时都应当采取这种方式;(3)尽量避免单根地线中产生的随机电流回路,这需要精心设计电力分配系统。
除此之外还有3种方案可以降低磁场数值:增大距离、磁矩补偿和磁屏蔽。
(1)增大距离:磁场源产生的磁场大小会随距离的增加逐渐衰减,因此对于无法避免的磁场源,在设计过程中应当使其尽量远离惯性传感器。
(2)磁补偿:由于磁场源都是以偶极子形式存在的,是一个矢量,因此可以通过调整附近两个或多个磁场源的方向来实现磁补偿。但要尽量避免加入额外不必要的磁场源,这会对磁场梯度产生影响。针对电流回路产生的磁场,可以通过采用与原电流成比例关系、反向的线圈来进行补偿,但是会引入额外的功耗和重量。在太阳能帆板处,应尽量采用这种方法实现磁补偿,因为每个电池板产生的电流都是相等的,比较容易实现补偿。
(3)磁屏蔽:在空间引力波探测项目中,磁屏蔽不是很好的方案,主要原因在于磁屏蔽会引入额外的磁场梯度,从而对加速度噪声产生影响。另外由于所用的磁屏蔽材料在长期使用中很难保持稳定的磁矩分布状态,从而可能会产生额外的磁场贡献。
翻转课堂(Flipped Classroom)是把传统的课堂教学过程翻转过来,教师通过网络将学习资料发布给学生在课前学习的方式完成知识传授的过程,在课堂上主要采取难点答疑、小组讨论、学习成果展示及评价的方式让学生完成知识内化的过程。基于翻转课堂的混合式教学模式是近年来教育界研究的热点。
在最后评估时,需要对以下两部分进行磁特性测试:(1)太阳能帆板部分。主要原因在于该部分占了整个卫星的大量体积并且距TM相对较近,需要进行多偶极测试;(2)卫星的其他部件。
4 磁监控测试系统
在欧空局空间引力波探测计划的探路者号LISA Pathfinder中的磁通门传感器为Billingsley公司生产的TFM100G4型磁通门传感器[19],其在精度为166.7 μV/nT,量程为60 μT时,噪声水平为1 Hz时100 pT/Hz1/2。磁通门技术的测试原理本质上仍是电磁感应原理:利用磁芯饱和现象,实现了被测量磁场的磁调制,转化为感应电动势输出。整个过程实现了磁场到电压的变化,从而完成磁场强度的测量[20]。典型的磁通门传感器由两根平放置的磁芯构成,磁芯上的激励线圈反向串联,感应线圈同向串联并利用周期电流驱动使其达到饱和。当没有外磁场时,每个磁芯的相反驱动电流会使相互磁通量相互抵消,总磁通量为零,并且可以补偿由于感应线圈奇次谐波部分带来的影响。当有环境磁场存在时,感应线圈中的二次谐波行部分被用来测试环境磁场的大小。LISA Pathfinder中所用的磁通门外观及内部尺寸如图1所示。

图1 左:Billingsley公司生产TFM100G4型三轴磁通门传感器照片,中图和右图分别为磁通门传感器的几何尺寸和示意图[21]Fig.1 Left picture:billingsley tri-axial fluxgate magnetometer selected for LISA Pathfinder. Center and right: mechanical drawing and schematic of the inner sensor heads(X, Y and Z axis)
经过测试,该型号磁通门传感器可以满足空间引力波探测所需的噪声曲线与精度,但问题在于,虽然该型号磁通门已经是满足空间磁探测用磁传感器中比较小的三轴磁通门传感器产品,但它的磁传感器头大约为2 cm,尺寸仍然偏大(94 cm3),每个轴的功耗大约为0.8 W,功耗过高。由于这些原因,在LISA Pathfinder中仅用了4个三轴磁通门传感器进行测试。由于传感器本身具有的大块磁芯和驱动电流会对目标位置产生额外的磁场噪声,需要将磁通门传感器远离检测区域(≥18.85 cm)处来消除感应线圈对所检测区域的磁场干扰。此时,传统的插值算法已经不能满足精度要求,这就要求有一套高精度的磁场梯度反演模型结合插值算法来实现目标位置的磁场计算。西班牙加泰罗尼亚空间研究所提出的神经元算法可以得到最优的磁场梯度和磁场数值,但其磁场数值的误差仍很高,为20%~30%[21]。
综上,磁通门虽然具有较高的磁场测量精度,较低的磁噪声水平,可以作为传统的空间弱磁探测的首选方案,但其作为空间引力波探测计划中的磁测量方案仍存在以下不足:
(1)不能满足传感器尺寸/重量限制和空间分辨不准确度。在空间探测任务中,对尺寸和重量(载荷)有着严格的限制,因此,传感器尺寸越小,在相同的载荷水平下就可以放置更多的传感器,从而增加磁场空间分布图像重构的精度。同时可以缩短传感器和目标位置的距离,从而降低空间分辨的不准确度。
(2)噪声水平。LISA Pathfinder中所用的磁通门传感器本身噪声水平已很低,但是当磁通门传感器尺寸缩小时,其噪声水平会大幅增加而导致测试精度达不到标准。而空间引力波探测的频段要求低至0.1mHz,对噪声水平的要求比LISA Pathfinder还要小一个数量级。因此,在最终的空间引力波探测计划中需要体积更小、精度更高的磁强计进行弱磁场探测。
(3)传感器磁芯影响。由于最终测量的是TM处的磁场强度,需要对卫星中包括磁传感器本身存在的各种磁场源进行评价。基于以上考虑,传感器本身剩磁约为271 μAm2。为了降低对TM处磁场影响,磁通门传感器必须放置到远离TM的地方。此外,寻找一个具有少磁性材料的传感器对进一步优化空间引力波探测中的磁场预算也有很大的帮助。
(4)剩磁效应。所有具有磁性材料的传感器都会有剩磁,这是由磁性材料本身的磁滞效应决定的。对于相同材料,磁芯体积越大,对应的零磁场下的剩余磁矩就越大。对于LISA Pathfinder中所用的磁通门传感器,在x和z方向剩磁分别为-1.8 μT和-1.2 μT。剩磁主要由振荡器和传感器磁芯贡献。
其中,原子磁强计由于物理原理限制,只能进行标量场测试,无法给出磁场的准确方向。传统磁通门的优缺点在前面已经详细论述。由表4可以看到,随着尺寸的减小,微型磁通门传感器测试精度会大幅下降,噪声水平会大幅上升而不能满足空间引力波探测的需求。由于GMR和TMR传感器的传感器核心结构为磁性超薄膜异质结构,故它们的本底噪声约为3和3.8 nT/Hz1/2,相较于其他测试方法,噪声密度偏大[24]。综上,可满足空间弱磁场探测的传感器为AMR传感器和GMI(MI)传感器。西班牙加泰罗尼亚空间研究所正在对AMR传感器和TMR传感器方案进行评估。

表4 可能用于空间弱磁场探测小型磁传感器Tab.4 Small magnetic sensors which can possibly be used for space weak magnetic field detection
西班牙加泰罗尼亚空间研究所通过对AMR方案的研究探索发现,经过测试电路优化和周期脉冲激励技术激励后,可以有效抑制AMR传感器中由磁性薄膜的磁矩随机排列而产生的测试噪声[32]。在该研究组2018年发表的文章中指出经过该方法优化后可以在LISA测试频段(0.1 mHz~1 Hz)实现噪声曲线优于10 nT/Hz-1/2 [33]。该研究组同样也对TMR传感器方案进行了探索,利用周期脉冲激励技术进行测试电路优化后,其噪声曲线可以在1 mHz以上优于10 nT/Hz1/2。噪声水平还需要进一步优化。
从表4中可以看出,GMI(MI)传感器具有更高的精度和更低的噪声密度,因此本文将针对基于GMI(MI)传感器搭建适用于空间弱磁场探测的低频低噪声测试系统进行探讨。
1992年,日本名古屋大学的K.Mohri等人[34]发现,CoFeSiB非晶丝两端的感应电压随着外加直流磁场的增加而急剧下降。当时他们测量到的电压是非晶丝感抗部分对应的分量,因此实际上这种现象是磁电感效应。往后的研究表明,铁磁非晶合金的交流电阻也会随外加直流磁场的改变发生明显变化。为与通常所说的磁阻(MR)效应加以区分,该效应被称为交流磁阻效应(MI)。K.Mohri等人在综合分析磁电感效应和交流磁阻效应后,认为两者是同一物理效应的不同表现形式。并把磁性材料通以交变电流时,在外磁场作用下交流阻抗会发生显著变化的现象正式命名为磁阻抗(MI)或巨磁阻抗(GMI)效应。MI和GMI的区别仅在于交流激励是通过线圈施加或是直接施加于磁性非晶丝上,从本质上说MI和GMI是同一种效应,因此有时MI传感器根据设计不同又叫做GMI传感器。
基于MI效应研制的磁场传感器主要用于弱磁场探测。典型的MI效应磁场传感器最早是由Mohri等人设计和制造的[35]。为了提高此类传感器的的灵敏度,科研工作者做了很多的努力,比如改变工艺参数和电路设计等[36]。这些传感器的敏感元件可以选用非晶丝[37]、非晶带[38]和磁性薄膜[39]等材料。日本爱知钢铁公司利用非晶丝设计和制造了很多种类的MI效应磁场传感器,应用相当广泛[40]。其相比于传统磁性传感器具有功耗低、体积小等优点,最重要的是具有较高的磁场灵敏度。Yabukami等人[39]用CoNbZr薄膜作为敏感元件,设计制作了一种对磁场具有高灵敏度的MI效应磁场传感器,在激励频率为500 kHz时,其分辨率达到了1.7 pT,甚至高于磁通门传感器的分辨率。此磁场传感器的探头长度只有1 mm,是磁通门传感器的二十分之一,而探测磁场的分辨率却是磁通门传感器的20倍。此外,MI效应磁场传感器相对于传统磁性传感器具有很高的热稳定性,受温度影响的误差只是传统磁性传感器的三分之一[41]。值得一提的是,利用Co基非晶丝材料研制的MI效应传感器在零下40 ℃到85 ℃的温度范围内的热稳定性都很好[40]。
本课题组对日本爱知公司生产的MI-CB-1DH型MI传感器进行了低频噪声测试,发现MI传感器也可以作为空间引力波探测用的备用磁传感器方案。官方给出的数据是在0.1 Hz到1kHz范围内噪声优于200 pT·Hz-1/2,但是,其更低频段的噪声并未给出。本文对该传感器进行了电路改造,使得它可以测试更低频段的磁场信号,并对其灵敏度等信息进行了表征。试验结果表明,该型号的MI传感器在经过电路改造后可以实现1 mHz~1 Hz频段范围内噪声优于3 nT·Hz-1/2。对该传感器的测试电路进行优化后,有望将其噪声控制在空间引力波要求的范围内。但是在测试过程中也发现了一些问题需要进一步优化:(1)在解除交流耦合后,零点漂移偏大;(2)量程偏小,目前所用传感器量程为±2 μT;(3)温度稳定性尚有待评估。
5 结束语
本文对空间引力波探测过程中星上剩磁对惯性传感器的影响进行了总结。从理论模型出发讨论了星际磁场、卫星平台剩磁和时变磁场对惯性传感器加速度的影响,以LISAPathfinder所在日地L1点空间环境为例给出了磁场对加速度噪声的贡献为2.775×10-15m s-2Hz-1/2。该数值与最终的空间引力波探测计划对加速度噪声的要求相比,还有一定的距离,仍需对卫星平台磁场分布作进一步优化。此外,对卫星平台磁场分布的计算方法进行了介绍,并给出了卫星平台磁场分布优化的具体方案和措施。最后,对可能的弱磁探测用的磁传感器进行了介绍,通过对比发现,AMR、TMR和GMI为3种测试精度和噪声水平可能满足空间引力波探测用的候选弱磁传感器,有可能作为小型化、低功耗传感器替代原来磁通门的方案。
猜你喜欢
大电机技术(2022年5期)2022-11-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
防爆电机(2021年5期)2021-11-04
军民两用技术与产品(2021年10期)2021-03-16
数字制造科学(2020年4期)2020-12-28
四川电力技术(2020年3期)2020-07-15
弹箭与制导学报(2018年1期)2018-11-13
科技资讯(2014年36期)2015-03-30
航天返回与遥感(2014年4期)2014-07-31
