
无人机辅助车联网环境下干扰感知的节点接入机制
2019-07-11 03:54范茜莹黄传河朱钧宇文少杰
通信学报 2019年6期
范茜莹,黄传河,朱钧宇,文少杰
(1. 武汉大学计算机学院,湖北 武汉 430072;2. 工业和信息化部计算机与微电子发展研究中心(中国软件评测中心),北京 100081)
1 引言
作为现代智能交通系统(ITS, intelligent transportation system)的核心基础设施,车辆自组织网络(VANET,vehicular Ad Hoc network)得到了广泛关注[1-2]。通过车与车(V2V, vehicle-to-vehicle)及车与基础设施(V2I, vehicle-to-infrastructure)之间的通信,VANET可以提供各种类型的服务,包括道路安全(如碰撞预警和智能交通管理)、娱乐需求服务(如社交网络和在线游戏)、基于地理位置的服务(如兴趣点和路径优化)等。面向未来的ITS应用需要覆盖范围更大、通信方式更灵活高效、信息处理更智能且安全的车联网环境。车辆不仅需要实时获取较大范围内的交通状况和预警信息,同时也可参与信息传输。然而,在大空间尺度下,障碍物、复杂地形、难以接近的地理区域、恶劣天气等因素都可能导致链路质量降低甚至不可用。特别地,在某些极端环境中缺乏基础设施来辅助车辆通信,单纯依靠地基车联网难以满足需求。
针对该问题,利用无人机、飞艇、卫星等空间节点作为辅助的空-地互补方案逐渐受到关注,并取得了一定发展[3]。相比于地基车联网,高空平台(HAPS, high altitude platform station)具有更大的覆盖范围,更强的态势感知能力、动态重构及容灾能力,尤其是在大范围广播、跨路网的交通态势感知、快速灵活部署与调度等方面具有地面基础设施难以比拟的优势。充分利用上述优势,在此基础上将提高与地基车联网互联互通,组成空地一体化车联网,能更好地支撑智能交通管理应用场景,具有较高的研究价值和意义。
得益于高移动性及可灵活部署的优势,无人机为各种商业应用和民用应用提供了有效的解决方案,如交通管制、远程监控、视频流传输等。在面向未来的ITS应用场景下,引入无人机辅助车联网通信具有地基车联网不可比拟的优势[4]。首先,无人机通信受信道衰落影响较小,且更易于与车辆建立持续时间更长的视距链路,具有相对可靠的空-地信道。然后,无人机可在三维空间内灵活部署、自由移动,更易于将多跳转发转变为单跳中继,能降低通信时延,提高传输可靠性。最后,考虑一些缺乏足够地面基础设施的极端场景,可通过部署无人机来快速改善网络连通性,避免长时间链路中断。
引入无人机辅助通信后,链路选择需要综合考虑持续时间、信道状态、网络负载、信号强度等诸多因素的影响,而信号强度会影响链路的干扰水平,因此,需要设计有效的干扰感知节点接入机制,在保证可靠性的前提下通过减少链路切换次数来降低通信开销,同时提高网络的吞吐量。本文主要贡献包括以下2个方面。
1) 采用无人机与地面车辆进行协同通信,构造无人机辅助的空地一体化车联网。综合考虑节点移动带来的切换成本、链路干扰及节点处发射功率引起的开销,将接入问题形式化为一个多约束的优化问题。
2) 针对所提出的优化问题,提出了一种分布式的节点接入机制及对应算法,利用基于对偶的优化方法,计算得到链路的最优传输速率、链路切换次数及节点发射功率,并以此为依据选择接入对象。
2 相关工作
有效的接入机制可以帮助节点选择合适的信息传输的接入对象,进而提高网络的吞吐量等性能。现有的研究工作主要根据数据传输速率、时延、吞吐量等因素来选择接入节点。
吴黎兵等[5]提出了一种基于VANET-cellular网络架构的安全消息广播中继节点选择方法,根据候选车辆的蜂窝网络信号强度及其增量、链路稳定度、信道质量、地理位置等参数选出最佳的装有蜂窝网络接口的中继节点,该方法可以减少对车流密度及基础设施的依赖。Ma等[6]提出了一种跨层中继节点选择方案,综合考虑了端到端传输速率、中继节点剩余的电池使用时间及中继辅助的 D2D(device-to-device)端到端传输时延,然后描述了如何根据这些标准在D2D通信中进行中继节点的选择。
对空地一体化网络中的低成本灵活接入机制,国际空间数据系统咨询委员会(CCSDS, Consultative Committee for Space Data System)制定的最新标准中[7],空间网络支持地面节点的接入,但是接入数量有限,还不能满足空地一体化车载网络多车载用户同时接入的需求。Liu等[8]提出了一种空间信息网络环境下的链路选择方法,该方法在时间约束条件下,实现能耗最优化。Abdulla等[9]利用势博弈理论,解决了在无人机辅助网络中如何使接入节点的能量效率最高的问题。Lyu等[10]研究了地面终端(GT, ground terminal)和无人机组成的无线系统,提出了周期性多址接入机制(CMA, cyclical multiple access),以一种基于无人机位置的周期性时间分割方式来调度无人机和GT之间的通信。通过对不同GT的时间分配进行优化,以最大化其最小吞吐量。Tuna等[11]提出了无人机辅助无人值守的无线传感器部署系统,作为灾后解决方案,可在任何有需要的地方使用。
为了将无人机和地面车联网结合起来,Zhang等[12]提出了基于软件定义的空天地一体化网络架构来提供无间隙、高效率的车辆服务,最后总结了空天地一体化网络面临的机遇和挑战。Zhou等[13]提出了一种空地合作的车辆网络架构,其中多个无人机形成空间子网络,来辅助地面车辆子网络进行信息的收集和分发,并指出无人机可以作为中继节点来解决地面节点的高速移动问题。Kawamoto等[14]通过卫星和地面无线通信网络的合作来解决上下文感知的多媒体内容传输的问题,可以在卫星/地面频率共享系统中动态分配带宽,为用户提供上下文感知的内容。Zeng等[15]对无人机辅助无线通信技术进行了概述,介绍了基本的网络架构和主要的信道特性,并强调了其中存在的关键问题。随后,Zeng等[16]又通过优化源节点/中继节点的发射功率和中继轨迹来优化吞吐量,同时考虑了实际的移动约束和中继节点处的信息随意度约束。对于固定的中继轨迹,吞吐量优化的功率分配服从阶梯式水填充结构。Cheng等[17]考虑使用一个或多个无人机作为2个远距离地面节点之间通信的中继节点,提出了LCAD(load carry and deliver),通过无人机从源节点获取数据并将数据携带转发到目的地,然后将信息传输到目标地面节点,实现吞吐量的最大化。
Oubbati等[18]研究Ad Hoc模式下的无人机和地面VANET协作进行的路由过程,提出了2种不同方式的路由协议,分别是针对地面网络和无人机之间信息传输的 UVAR-G协议及在无人机之间信息传输的UVAR-S协议。Wang等[19]设计了一种无基础设施的无人机辅助车联网系统,即车辆-无人机混合的车辆自组织网络VDNet。根据分布式车辆位置预测算法,利用无人机来增强车辆之间的消息传输。Lu等[20]和Xiao等[21]使用无人机来传递车辆的消息,并改善VANET对智能干扰机的通信性能,他们将无人机与智能干扰机之间的交互表述为抗干扰无人机中继游戏,其中无人机决定是否将OBU消息转发到另一个RSU,干扰机通过观察无人机和VANET策略以选择相应的干扰功率。Seliem等[22]提出了一个数学框架得到最小无人机密度,即2个相邻无人机之间的最大间隔距离,以改善车辆到无人机分组传输时延的最坏情况。Fawaz等[23]开发了一个数学模型来描述不合作车辆对路段之间端到端连接的影响,并提出利用无人机作为存储-携带-转发节点来减轻不合作节点对端到端路径连接的不利影响。Shilin等[24]考虑在孤立车辆段使用无人机的通信网络模型。
本文研究干扰感知的节点接入机制,综合考虑链路持续通信时间、切换次数及信息传输的可靠性,在改善系统吞吐量的同时,减小通信开销。
3 系统模型和问题描述
3.1 网络模型
假设车辆和无人机均配备有 GPS和数字地图以获取节点当前的地理位置,同时假设节点没有能源限制。无人机有一个较低且恒定的飞行高度,能够与地面上的车辆进行通信[25-26]。另外,假设无人机的运动轨迹是预先设置好的,无人机不仅能够收集及掌握网络的全局信息(如道路上车辆节点的密度),也可以作为中继节点参与车辆之间的信息传输,在链路质量较差或者中断的情况下建立新的通信连接来协助信息传输,保证地面网络连通性的同时改善信息传输的性能。
使用图G(V,E)表示无人机辅助车联网的网络拓扑结构,其中,V表示无人机节点和车辆节点的集合,E表示节点之间链路的集合。表示节点i在t时刻的邻居节点集合。二元组(i,j)∈E表示节点i和节点j之间的链路,l表示网络中的链路,rl表示数据流经过链路l的传输速率。为了保证信息传输的可靠性,链路的最大容量表示为cl。网络架构如图1所示。
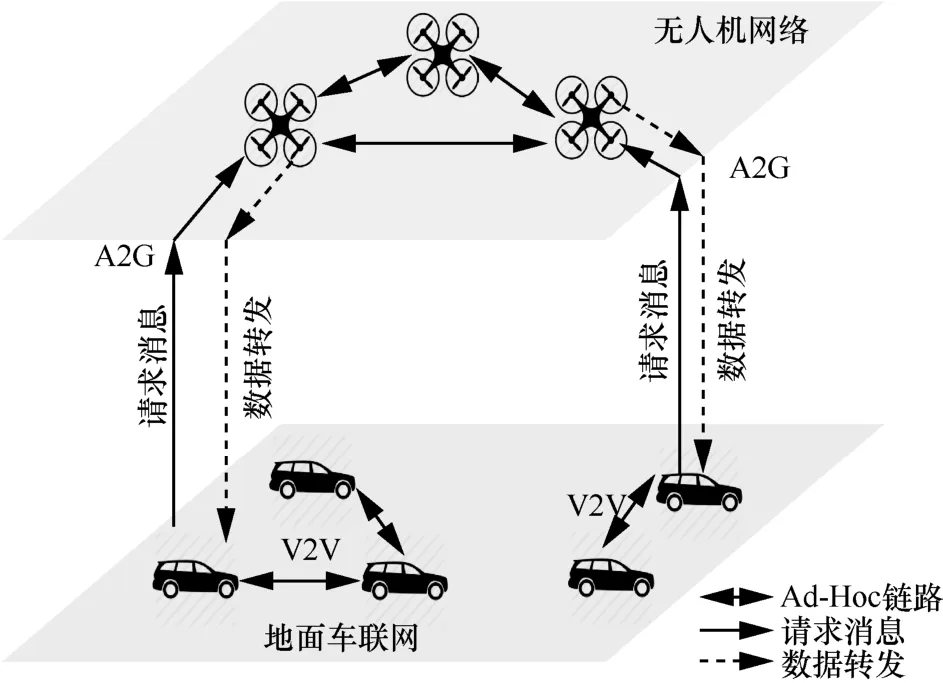
图1 网络架构
空地一体化车联网主要包括无人机网络和地面车联网,其中包括V2V通信、无人机与车辆(U2V,UAV-to-vehicle)之间的通信及无人机与无人机之间的通信(U2U, UAV-to-UAV)。本文所用的参数及其含义如表1所示。
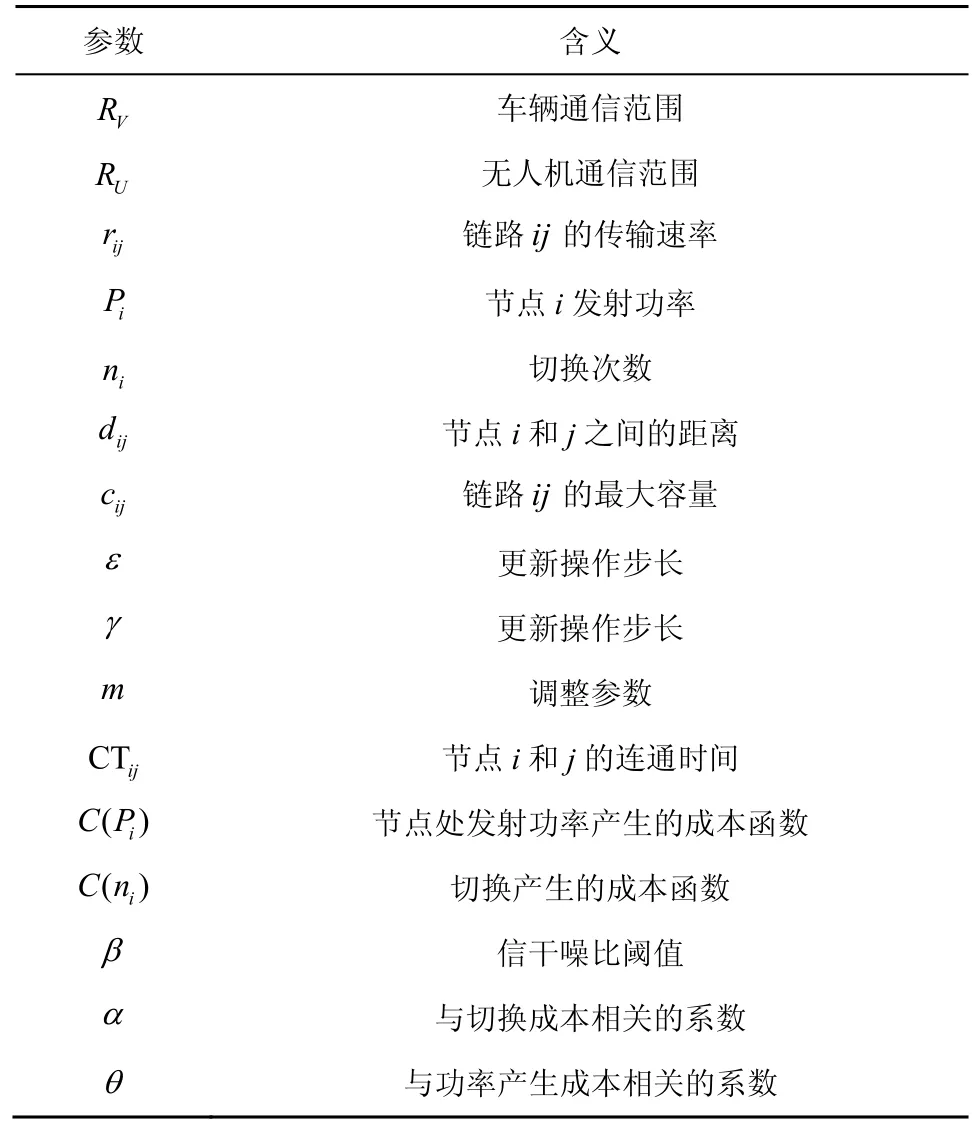
表1 本文所用的参数及其含义
3.2 无人机通信模型
无人机与车辆之间传播信道的路径损失模型描述如下[27],单位为dB。

其中,fc表示载波频率,c表示光速。视距传输(LoS,line of sight)概率是路径损失模型中较为重要的参数,无人机和接收者之间的视距传输概率可表示为
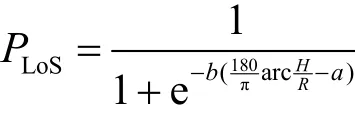
其中,常数a和b的值取决于所处环境。非视距传输(NLoS, non-line of sight)的概率则为

假设d表示无人机与车辆之间的距离,可用来计算,H和R分别表示无人机的高度和无人机与车辆之间的水平距离。ηLoS和ηNLoS分别表示自由空间传播中视距传输和非视距传输的平均额外损耗,二者的值取决于通信环境。无人机的通信范围取决于其飞行高度及传输路径损耗阈值。
在无人机辅助车联网环境下,部署无人机能够改善网络的连通性,与单纯的车联网环境相比,相应的节点密度也将有所增加。根据文献[23]可知,假设长度为d的道路上分布有k个无人机,那么道路节点密度将增加。该道路上的平均节点数目可表示为,节点密度表示为,其中ρ表示没有无人机参与情况下的道路节点密度。下文中将无人机节点和车辆节点统一描述为节点,U2V链路与V2V链路之间的差异由相应链路的传输速率和信干噪比来反映。
3.3 切换次数
考虑信息传输过程中,车辆节点移动较快,节点之间进行通信时可能发生频繁的链路切换,此处定义成本函数C(ni)来表示链路切换产生的成本开销,其中,ni表示节点的链路切换次数。切换次数的计算方法描述如下。
为了减少链路切换次数,每个节点选择下一跳接入对象时,在保证可靠性的前提下,应尽可能选择与其连接时间较长的节点,以增加端到端路径的生存时间。因此,需要计算节点间链路生存时间作为选择接入对象的参考。根据节点的坐标,计算得到节点之间的距离dij,结合节点移动的速度,可以得到节点之间的通信时间。假设节点i和节点j在t0时刻坐标为和可计算得到二者之间的距离。经过时间Δt后,节点i坐标为节点j的坐标为,同样可计算得到二者之间的距离。节点i和节点j单位时间内(Δt=1)的分离速度为。如果节点之间的距离变大,那么节点之间总距离表示为Δdij=如果节点之间的距离缩短,那么Δdij=R+。综合考虑节点i和j的分离速度和总距离,可以得到二者之间链路的连通时间CTij,如式(1)所示。

假设节点i是发送节点,节点j是候选接入对象,根据节点i处需要发送的数据量D及链路ij的传输速率,得到传输时间表示为

结合节点i与j的连通时间CTij,得到切换次数表示为

3.4 问题描述
在无线通信过程中,如果节点的发射功率较大,可能对其他链路产生干扰,导致网络吞吐量降低。在保证链路可靠性的前提下,可通过控制发射功率来减少干扰。定义节点发射功率产生的成本函数为C(Pi),其中,Pi表示节点i的发射功率。假设C(Pi)是发射功率Pi的单调递增凸函数,即发射功率越大,产生的成本越大,同时C(Pi)也是Pi的一阶连续可微函数。切换成本函数C(ni)和函数C(Pi)具有相同的性质。
综合考虑节点移动及链路中断等带来的切换成本、节点处发射功率产生的开销及链路干扰等因素,节点接入机制问题可形式化为一个多约束条件下的优化问题,如式(4)~式(7)所示。
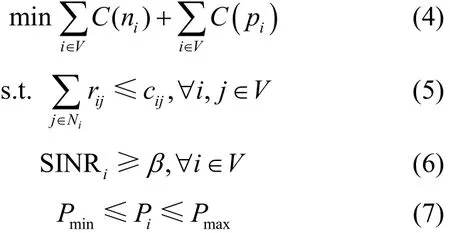
该优化问题的主要目标是减少节点之间的链路切换次数及优化节点的发射功率来最小化成本函数,同时提高网络的吞吐量。由于2个函数都是凸函数,二者的组合函数也是凸函数。约束条件(5)表示节点i和j的传输速率小于链路ij的容量,如果不能满足该条件,那么数据分组在传输过程中将被丢弃。约束条件(6)表示节点处的信干噪比SINR(signal to interference plus noise ratio)需要大于阈值β,才能保证信息传输的可靠性。约束条件(7)将中继节点的发射功率限制在一定的范围内,保证传输可靠性的同时能够减少对其他通信链路的干扰。
4 节点接入机制设计
在集中式优化方案中,节点需要频繁地与服务器通信以对网络相关参数进行更新从而得到最优解,然而频繁的网络通信会消耗大量的资源(如带宽资源),同时信息的并发传输会干扰其他链路,从而导致链路质量较差甚至不可用。此外,集中式的优化方法需要服务器接收到所有节点的信息才能完成优化,这也会消耗大量的时间来更新并优化相关参数。考虑上述因素,集中式优化方法不适用于车联网等高速移动的实时传输场景,而分布式的优化方法仅需要节点与其邻居节点交换更新信息来执行优化操作,能够解决集中式优化方法存在的不足[28]。因此,本文采用分布式优化方法来解决节点接入问题。
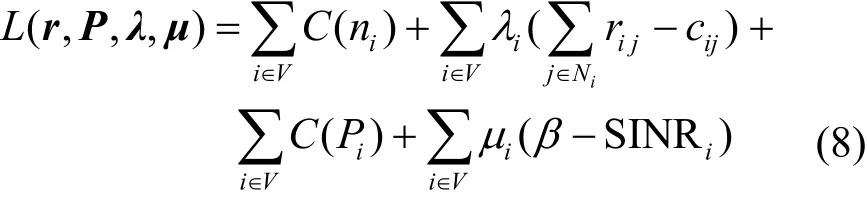
为了解决所提出的多约束优化问题,为约束条件(5)和约束条件(6)引入拉格朗日乘子向量和于是,优化问题的拉格朗日函数表示为
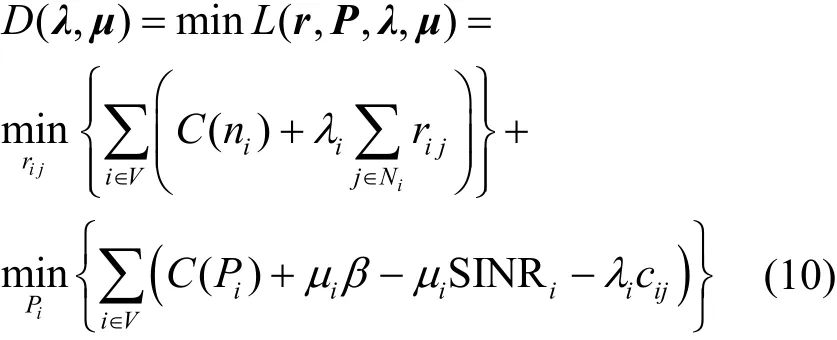
优化问题的对偶问题则表示为

由于rij和cij有关联,而切换成本C(ni)和信干噪比SINRi均与节点之间的通信距离相关,式(8)变换后表示为
根据文献[29],可将优化问题分解为2个子问题L1和L2,如式(11)和式(12)所示。
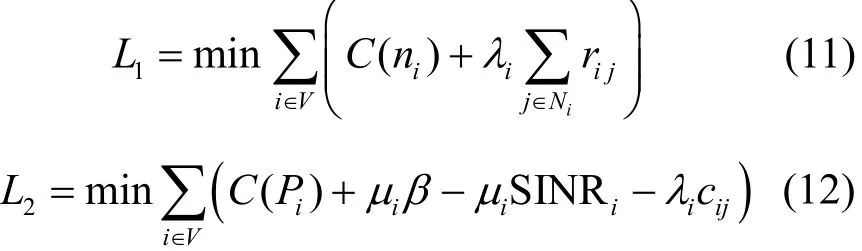
从上述子问题的结构形式可以看出,2个子问题均为凸优化问题,并且均与iλ相关。子问题L1联合优化节点之间的链路切换次数及链路传输速率,子问题L2则主要优化发射功率并保证链路可靠性,2个问题均能够以分布式的方法来解决。通过找出2个问题中iλ和iμ的最优值,计算得到最优的rij,即可得到节点i需要接入的对象j。这里,iλ可以理解为链路ij的传输速率带来的成本,iμ则表示保证链路ij可靠性的成本。
根据传统的基于对偶的优化方法可以得到向量λ和μ在每一次迭代的更新操作,如式(15)和式(16)所示。
其中,ε和γ为常数,表示更新操作的步长。由于车辆和无人机节点移动速度较快,动态变化的网络拓扑将导致链路连通性的动态变化,选择常数步长可以保证优化问题的收敛性并加快收敛速率[30]。
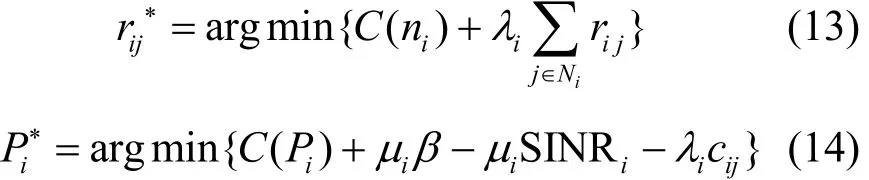
为了得到rij和iP的最优值,首先给λ和μ设置一个初始值,分别是λ(0)和μ(0),代入式(13)和式(14)求出rij和iP。然后,根据rij和iP的值,计算得到iλ和iμ的值。将求得的iλ和iμ代入式(15)和式(16),计算得到更新后的iλ和iμ。迭代上述更新过程,直到rij和iP的值固定不变或者iλ和iμ的值为0。
本文所提干扰感知节点接入机制如算法1所示。
算法1节点选择算法
输入车辆节点和无人机节点
输出一跳接入节点
1) 初始化
对λ(0)和μ(0)进行赋值;
2) 计算无人机节点的通信范围
RD = UAV. Range (PL(dB), altitude);
3) 获取节点i的邻居集合
交换信息,然后将节点i通信范围内的节点集合表示为;
4) 计算通信切换次数
根据等式(3)计算所需要的切换次数;
End for
5) 获取链路ij的连通时间以及SINRi
6) 迭代执行7) 和8)直到rij和iP的值不再发生变化或者iλ和iμ的值为0
7) 计算拉格朗日乘子iλ和iμ的值
8) 计算最优传输速率rij以及传输功率iP的值
根据等式


9) 调度过程
获取最优的rij和iP对应的值;
选择最优rij和iP对应的节点作为下一跳中继节点;
10) 算法结束
算法的具体执行过程如下。
1) 网络初始化阶段,节点i向邻居节点广播hello分组。当邻居节点j接收到来自i的hello分组时返回一个包含自身的识别符和坐标等信息的应答分组,然后节点i从收到的应答分组中提取出j的信息保存到中。根据节点i和邻居节点j的坐标以及节点i处数据量的大小,计算得到i和j的连通时间以及数据传输所需要的切换次数,对切换次
根据等式数排序并保存。然后,根据邻居节点反馈的链路状态信息,计算节点i处的信干噪比SINRi。
2) 初始化对偶向量λ(0)和μ(0),根据式(13)和式(14)计算得到链路ij的传输速率和节点处的发射功率,然后将计算到的传输速率和发射功率代入式(15)和式(16),对对偶向量λ和μ进行更新。迭代进行上述参数的更新,直到传输速率和发射功率不再发生变化或者对偶向量值为0。
3) 节点i对邻居节点的成本函数值以递增次序进行排序,从中选择成本值最小的邻居节点作为接入对象。如果在当前的节点通信时间内不能完成数据的传输,则重复执行以上步骤直到节点i处数据完成传输。
假设如式(4)所示的原始问题的最优值为p∗,对偶问题式(9)的最优值为d∗,有p∗d∗≥成立。该性质称为弱对偶性,对所有的优化问题均成立。
下面将证明算法的收敛性,通过对迭代过程进行分析,有定理1成立,证明过程参考相关工作[31]。
定理1假设和足够小,λ≥0,μ≥0,那么所提出的节点接入机制可收敛至最优解。
证明假设表示对偶问题式(9)对应的解。引入调整参数m,使m'ε=ε及mγ'=γ。结合式(15)和式(16),有
当拉格朗日乘子取最优时,对偶问题可表示为
当拉格朗日乘子随着迭代操作变化时,对偶问题可表示为
结合式(18)和式(19)可得
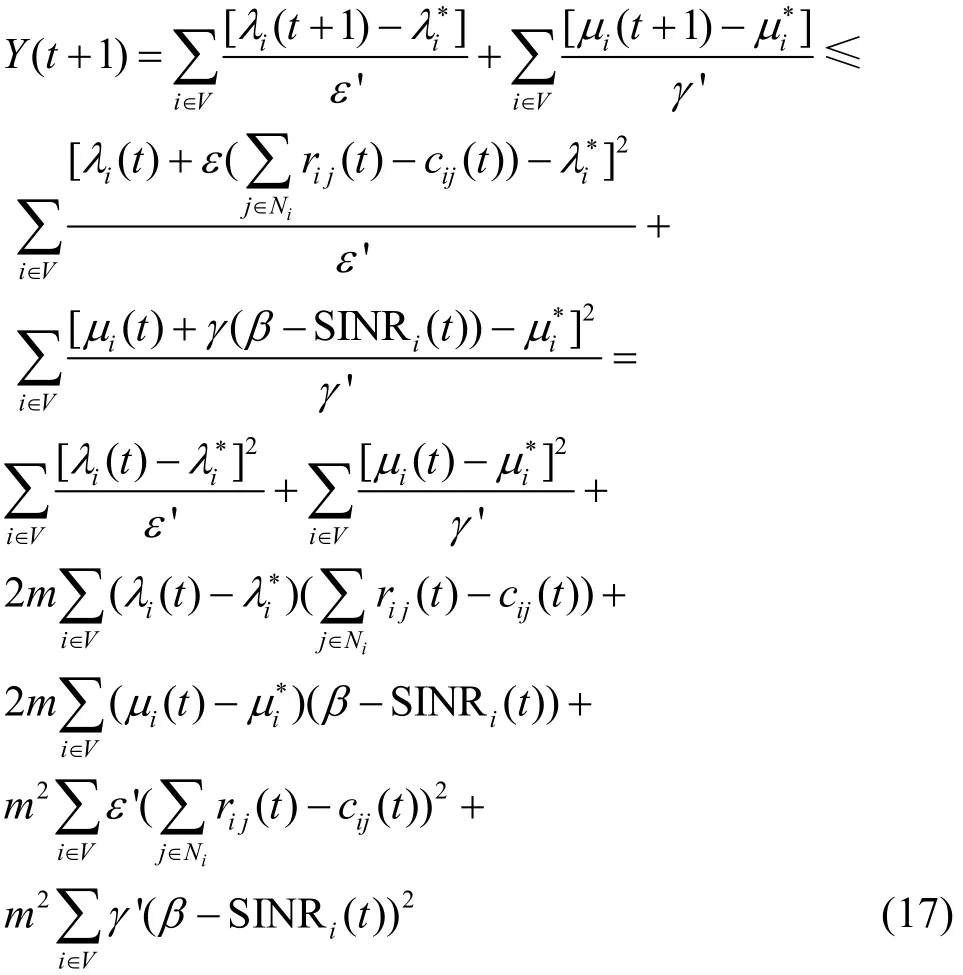
结合式(17)和式(20)可得

结合式(21)和式(22),有如式(23)所示的不等式成立。


下面分2种情况对Φδ进行讨论:当不在Φδ定义域内,,将调整参数m设置为,由式(23)可得Y(t+1)≤,可以看出经过多次迭代后算法收敛;当在定义域内,将调整参数m设置为,由式(23)可知不等式成立。假设是有界的,将其上界表示为Λ(δ,)Φ,有成立。当δ趋近于0时,Y(t)趋近于0,即当迭代次数趋近于无穷时,(λ,μ)趋近最优值。证毕。
为了满足实际交通管理应用中用户的不同偏好和要求,设置权重参数α和θ,以及成本函数U,U是占不同比例的链路切换成本和发射功率成本的总成本函数,表示为

其中,α+θ=1。随着调整系数α和θ的变化,链路切换和发射功率成本的比例进行相应调整,选择节点接入对象的标准也会有所不同。
结合不同的偏好设置,原多约束优化问题可表示为

约束条件如式(5)~式(7)所示。
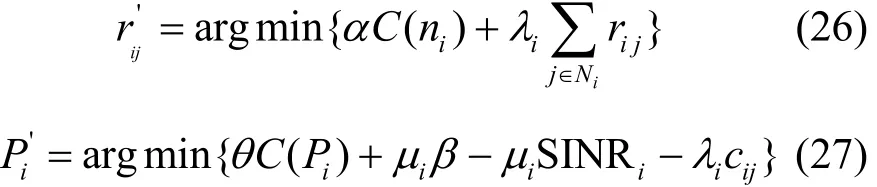
利用算法1对该问题进行求解,可以得到满足不同用户要求的接入节点。根据调整系数的变化,有如下3种情况。
1) 如果α>θ,则表明选择的接入对象倾向于降低链路切换次数。如果α<θ,则表明选择的接入对象倾向于降低节点发射功率引起的成本开销。
2) 如果α=0或θ=0,那么网络属性的综合权重和用户偏好的综合效用值将仅由链路切换或发射功率决定。当α=1,θ=0时,仅考虑网络中节点通信链路切换引起的成本。当α=0,θ=1时,则仅考虑节点发射功率带来的成本。
3) 如果调整系数均为0.5,表示相关的2个部分同样重要。结合成本函数,可以根据网络中不同的服务需求,灵活地选择下一跳的接入节点。
5 仿真结果与分析
将本文提出的干扰感知的节点接入机制与其他节点接入方案进行比较,通过仿真来评估算法的性能。
5.1 仿真设置
仿真模拟真实的车联网环境,场景所选择的区域大小为3 km×3 km,街道拓扑如图2所示,地图文件来源于 OpenStreetMap[32],在 SUMO(simulation of urban mobility)[33]中转化成道路网络。采用OMNeT 5.0++仿真平台对算法性能进行评估,节点之间的通信协议采用IEEE 802.11p协议。
假设无人机均匀分布在目标区域内,所有节点均配备有GPS,并且无人机可以收集所有车辆节点的位置信息。当有数据分组传输时,节点根据得到的最优传输速率和发射功率进行信息传输,发射功率取值范围为0.5~1 W。另外,更新操作中2个步长因子的值均设置为0.01。为了保证仿真结果的准确性,对不同参数设置进行 20次实验,将所有运行结果的平均值作为最终的实验结果。
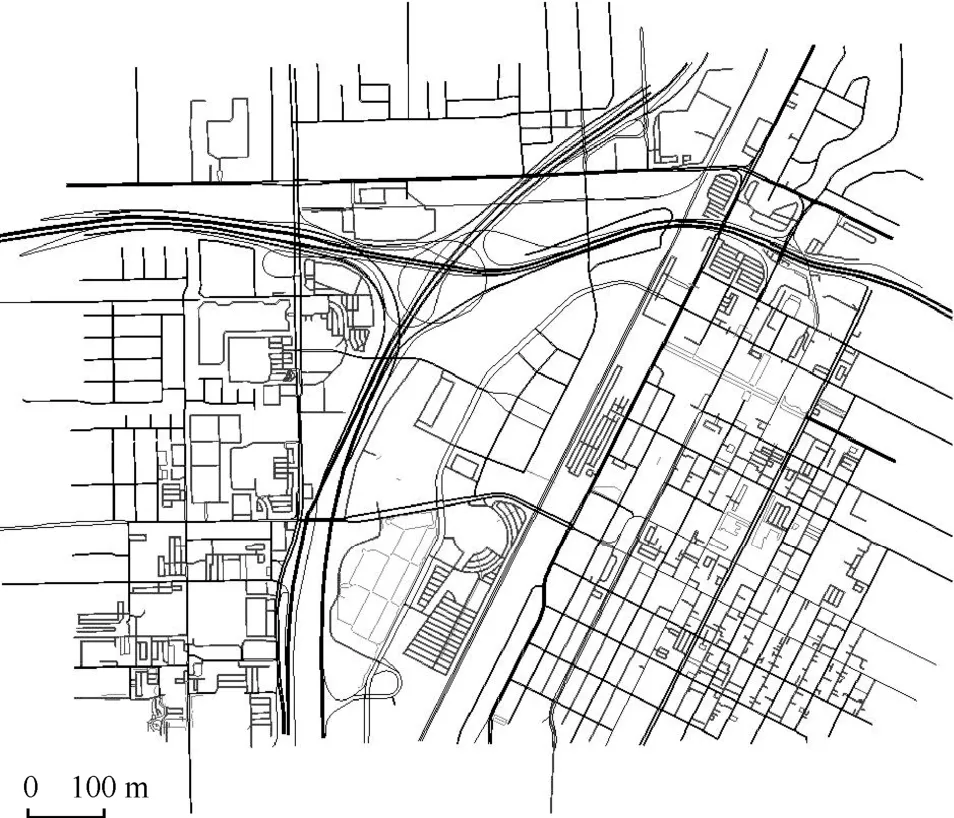
图2 实验场景拓扑结构
本节通过仿真实验对提出算法的有效性进行了验证和讨论,将所提出的干扰感知的节点接入机制与 Raza等[34]提出的 imax-weight-quality方案及Dahmane等[35]提出的WeiSTARS方案进行比较。通过比较网络节点密度(单位长度内即1 km的节点数目)和信干噪比的大小对算法的数据传递率、平均端到端时延及网络吞吐量等指标的影响,对算法性能进行评估。仿真参数设置如表2所示。
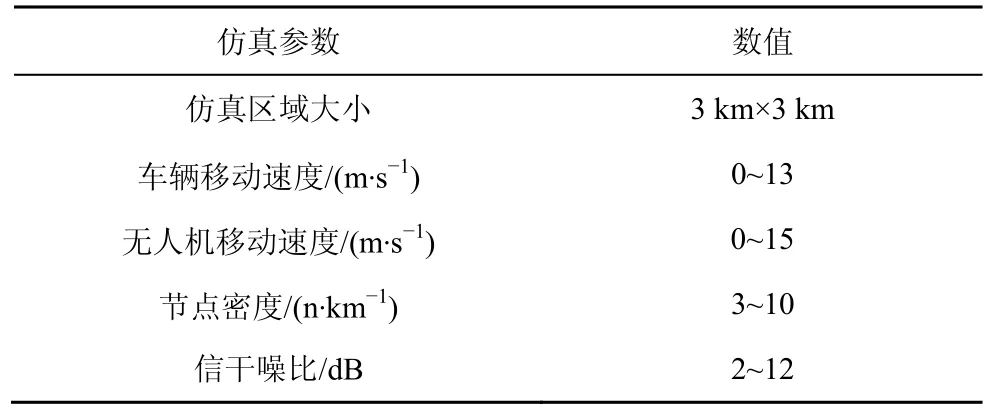
表2 仿真参数设置
5.2 仿真结果
本节将讨论当网络节点密度和信干噪比变化时,各算法对应的数据传递率、平均端到端时延及网络吞吐量的变化趋势。
5.2.1 数据传递率
图3描述了在不同节点密度下所比较算法的数据传递率的变化趋势。max-weight-quality方案考虑下一跳节点选择过程中的缓存,将链路质量(即节点处的信噪比)视为第二选择度量,如果多个链路的权重等于最大权重,该方案选择信噪比最大的链路用于信息传输。WeiSTARS方案是基于加权概率信任感知中继选择策略,主要利用协作感知消息(CAM, cooperative awareness message),将依据车辆和上下文相关信息计算得到的不同参数相结合,来选择下一跳中继节点。仿真实验中假设网络中所有节点均为合作节点,因此WeiSTARS方案中不诚实的车辆对信息传输的影响忽略不计。由图3可知,随着节点密度的增加,所有方案的数据传递率均有所增长。这是因为节点的增多使当前节点通信范围内的邻居节点增多,下一跳节点的可选择范围也随之增大。特别是在稀疏环境下,节点密度的增加可显著提高数据传递的成功率。得益于无人机的应用,本文提出的节点接入机制的数据传递率优于max-weight-quality方案和WeiSTARS方案。
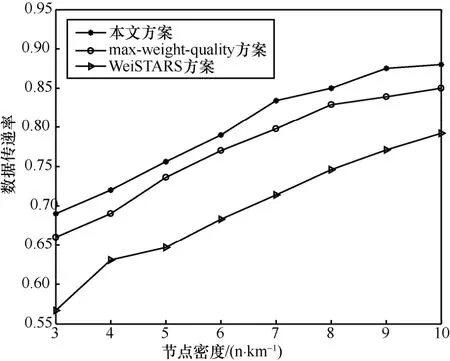
图3 节点密度对数据传递率的影响
图4描述了信干噪比SINR对各方案数据传递率的影响。由图可知,当SINR增大时,各算法的数据传递率均有所增长,其中 max-weight-quality方案的传递率低于本文所提出的节点接入机制,优于 WeiSTARS方案。原因在于,一定程度上提高SINR值保证了链路质量以及信息传输的可靠性,从而提高数据传递率。另一方面,与本文提出的方案相比较,max-weight-quality方案未考虑网络中存在的干扰问题,而WeiSTARS方案在链路稳定度和质量方面仅考虑了车辆的相对距离及障碍物对链路质量的影响,并未考虑节点发射功率对链路干扰的作用。
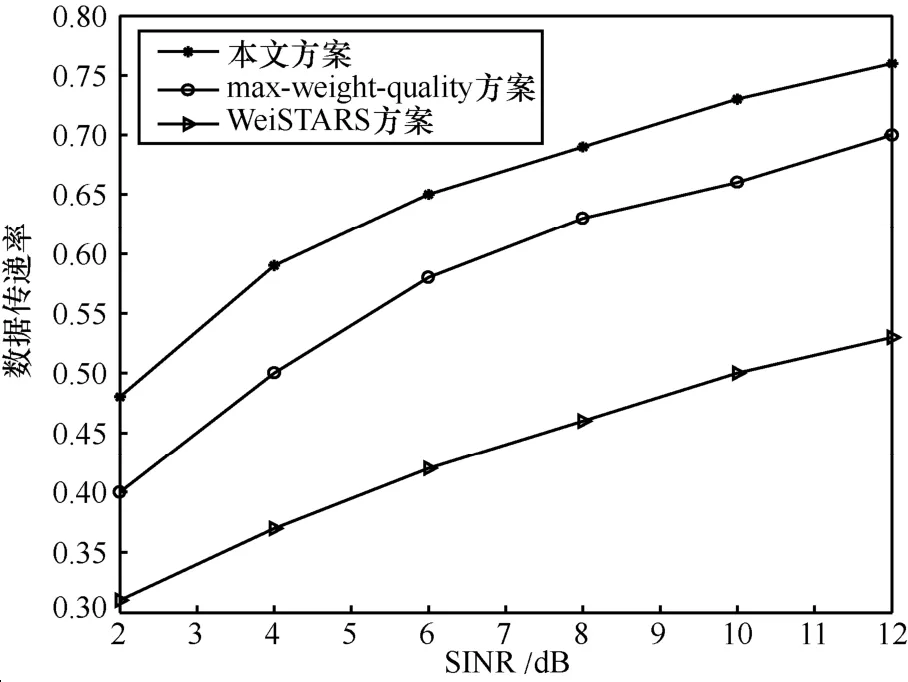
图4 SINR对数据传递率的影响
5.2.2 平均端到端时延
图5表明了网络中节点密度对平均端到端时延的影响。这里,端到端时延主要考虑排队时延和传输时延。由上文分析可知,节点密度的增加使所比较方案的数据传递率有所提高,因此平均端到端时延会降低。此外,为了减少节点之间的链路切换次数,本文所提出的接入机制在选择接入对象时优先选择链路连通时间较长的节点,使数据可以在较短时间内完全传输,因此,信息传输时的端到端时延低于其他2种方案。
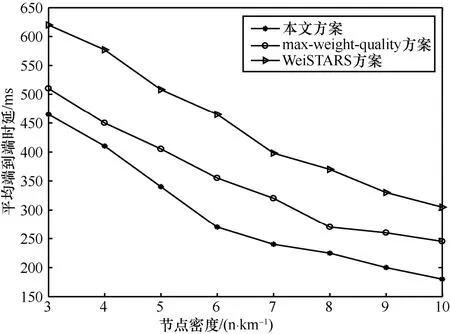
图5 节点密度对平均端到端时延的影响
图6评估了信干噪比SINR值对所比较算法的平均端到端时延的影响。对于足够大的SINR,max-weight-quality方案的时延将收敛到一个与候选链路数目和缓存大小相关的值;在SINR较小的情况下,中断概率的降低和数据传递率的提高使其时延低于 WeiSTARS方案。而WeiSTARS方案为了确保通信的可靠性和安全性,侧重考虑车辆之间的相对距离、链路的稳定性和质量以及接收成功的概率等因素,以避免过多的数据分组重传导致网络过载。本文所提出的节点接入机制同时考虑了传输可靠性和链路干扰的问题,在时延方面优于 imax-weight-quality和WeiSTARS方案。
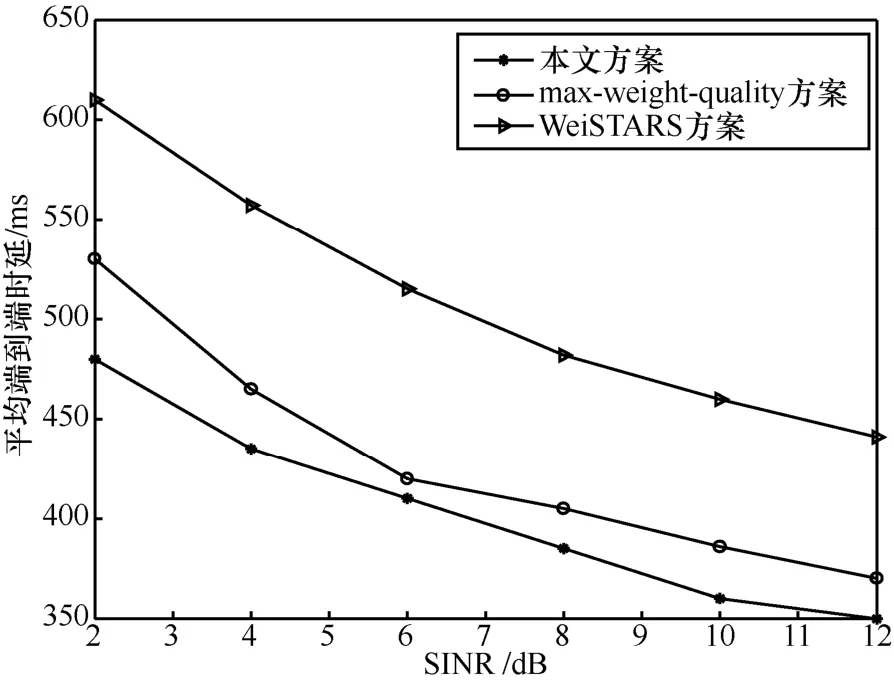
图6 SINR对平均端到端时延的影响
5.2.3 网络吞吐量
不同节点密度下所比较算法的网络吞吐量的变化如图 7所示。如图 7所示,随着节点密度的增大,所比较方案对应的网络吞吐量均有所提高。这是因为节点密度的增加可显著提高数据的传递率,网络吞吐量也随之增加。本文所提出的节点接入机制旨在降低干扰并提高通信可靠性,同时提高网络吞吐量,其获得的吞吐量也高于 imax-weight-quality方案和 WeiSTARS方案。
图8描述了由各种方案实现的网络吞吐量与信干噪比SINR的关系。由图8可知,随着算法中对应的SINR增加,3种方案的网络吞吐量均有所增长,而干扰感知的接入机制的网络吞吐量明显高于max-weight-quality和WeiSTARS这2种方案。这是因为本文所提出的机制优先选择连通时间较长的链路并且对节点发射功率进行了优化来减轻对网络中其他链路的干扰,有助于吞吐量的提高,max-weight-quality方案则仅考虑了噪声对网络通信的影响而忽略了链路对其他节点之间通信的干扰。与此同时,imax-weight-quality方案假设源节点和中继节点与中继节点和目的节点之间的链路容量一致,根据链路质量来选择中继节点,与WeiSTARS方案相比,本文方案在吞吐量收益上有明显的改善。
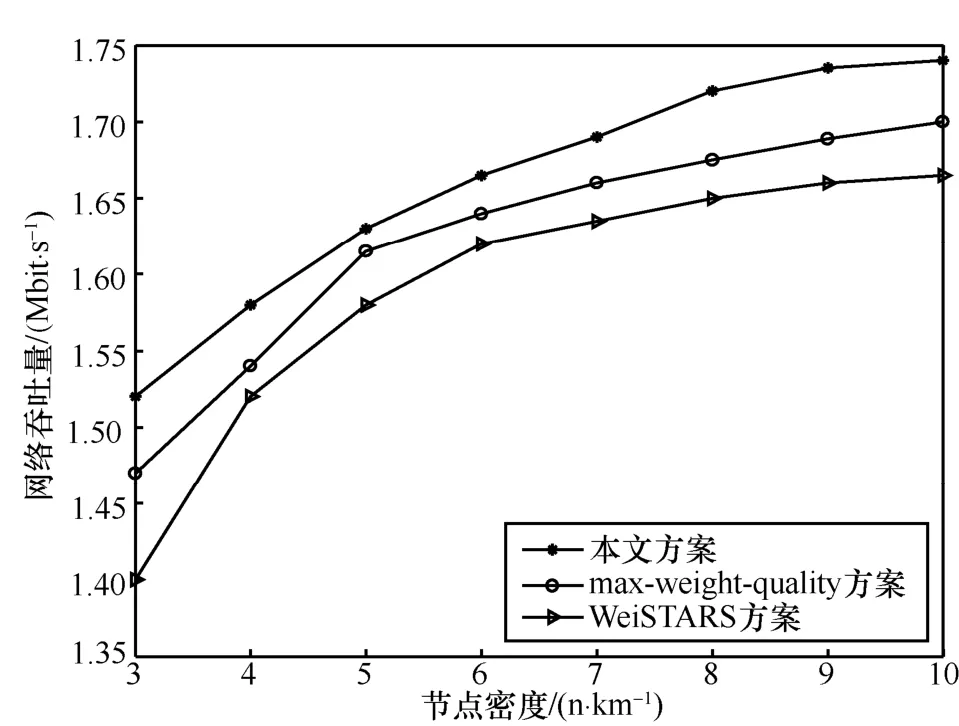
图7 节点密度对网络吞吐量的影响
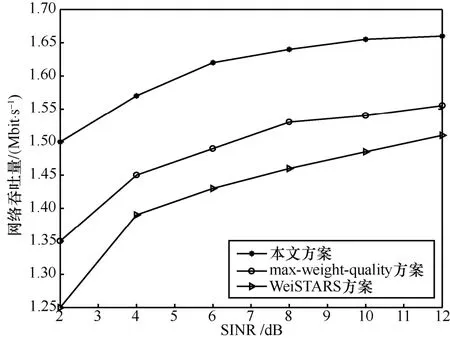
图8 SINR对网络吞吐量的影响
6 结束语
本文考虑在利用无人机辅助车联网通信场景下的信息传输可靠性问题。为解决由于节点移动以及链路质量低/中断导致的链路频繁切换问题,将节点接入问题形式化为一个与链路传输速率、链路切换次数和节点发射功率相关的优化问题,提出了一种干扰感知的节点接入机制。利用原始对偶方法得到链路的最优传输速率及节点的发射功率,以此作为选择接入对象的依据。该机制在保证链路可靠性的同时能够减少链路切换次数。仿真结果表明,该接入机制能在改善数据传递率和平均端到端时延的同时,提高网络吞吐量。
将无人机引入车联网进行辅助通信,在提高网络吞吐量和改善服务质量的同时,也会带来较高的成本及能耗问题,后续工作将重点关注无人机的能源效率,考虑无人机的部署和运行轨迹设计问题。
猜你喜欢
无线电通信技术(2019年1期)2019-12-24
太原科技大学学报(2019年6期)2019-11-18
无线互联科技(2017年24期)2018-01-22
中国管理信息化(2017年18期)2018-01-04
集装箱化(2017年4期)2017-05-17
集装箱化(2016年11期)2017-03-29
集装箱化(2016年12期)2017-03-20
物联网技术(2017年2期)2017-03-15
中国科技纵横(2016年14期)2016-10-10
航天器工程(2015年3期)2015-10-28
