
高精度激光陀螺仪温度补偿模型研究
2019-07-11 04:59刘黎映陈军军
导航定位与授时 2019年4期
陈 剑,刘黎映,陈军军
(1.海军装备部装备审价中心,北京 100071; 2.北京自动化控制设备研究所,北京 100074)
0 引言
高精度激光陀螺仪作为惯性导航系统的理想器件,具有启动时间短、动态范围大、可靠性高、寿命长等特点[1-3],广泛应用于各类惯导系统和武器装备。但在高低温变化的应用过程中,激光陀螺的输出零偏会受到内部温度特性的影响,从而制约了陀螺性能的进一步提高。为了降低和补偿温度对于激光陀螺零偏的影响[4-5],提高激光惯导系统的精度,研究温度和零偏的关系并采取有效的补偿措施,具有重要的工程实用价值。
通常抑制温度误差有两条途径:一是改进激光陀螺的设计、材料和工艺,提高自身的结构和元件性能,但这种方法成本较高,会增大陀螺自身结构的复杂性,且改善的效果有限;二是在现有陀螺的基础上,从温度误差的机理入手,寻找和建立陀螺零偏与温度的模型。样条插值法是激光陀螺惯性测量系统常用的方案之一,但给定样本数据的情况下,样条插值必须穿过给定的所有数据点,算法才认为所给的数据完全正确,增加了实时补偿的计算量。文献[6]中提出了基于神经网络的方法,但该建模方式存在收敛速度慢、易陷入局部极小以及泛化能力差等缺点。
本文立足于高低温试验数据,重点研究了变温过程中温度变化对于激光陀螺仪输出零偏的影响,并提出了改善陀螺变温零偏稳定性的温度补偿模型。该模型简单可靠,计算量小,环境适应型较强,具有重要的工程实用价值。
1 温度作用机理分析
由激光陀螺的结构特点分析可知,温度对陀螺的影响是内在的,温度变化几乎影响到陀螺的物理参数、几何形变、气体流场等所有因素[7-8]。当外界温度发生变化时,激光陀螺腔体发生变形,导致环路的光程发生变化,陀螺的输出零偏也会发生变化;同时,环境温度场的不均匀会导致陀螺两臂放电电流的不均衡,导致陀螺零偏偏大[9]。
另外,陀螺内部的光学腔体、光学片等光学器件的特性也会随着温度变化而改变,这同样会影响激光陀螺的零偏[10]。因此,温度变化和绝对温度值能够影响谐振腔激活介质增益,顺时针、逆时针光波的自作用和反作用[11-12],反射镜特性参数,闭锁锁区,工作气体流动速度,谐振腔长度变化,谐振腔工作模式,压电陶瓷歪扭等,从而导致陀螺零偏的不稳定[13-14]。
将陀螺置于温箱中,设置温箱温度区间为(-40℃,+65℃),陀螺输出与温度的关系如图1所示,试验过程中温变速率和温度梯度变化如图2所示。由此可见,变温环境下的温度场分布对于陀螺输出影响较大,在陀螺中使用了2个温度传感器来详细地描述陀螺温度场的分布。其中,1个安装在陀螺仪壳体,其位置尽可能靠近外部;1个安装在陀螺腔体上,用于更加准确地描述变温过程中的温度梯度。
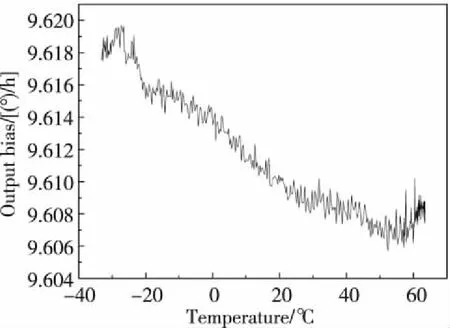
图1 温度变化对零偏的影响Fig.1 Effect of temperature variation on output bias

图2 变温过程中的温变速率和温度梯度Fig.2 Temperature variation rate and temperature gradient in the process of temperature variation
2 分析方法
在实际问题中,影响最终输出结果的因素往往不止一个,一般地,设有x1,…,xp共p个因素,因此多元线性回归模型可记为
(1)
其中,未知参数β0,β1,…,βp称为回归系数。

=min
(2)
逐步回归分析法的基本思想为:在所考察的全部因素中,按照对输出结果(陀螺输出零偏值)作用的大小,取最显著的变量(如温度、温度梯度、温度变化率等等),逐一引入回归方程。对输出结果作用不显著那些变量,自始至终都未被引入。同时,对已被引入回归方程的变量,再引入新变量后,如发现该变量对输出结果的作用变为不显著时,随时从回归方程中剔除,直至没有新变量引入方程,且已经引入方程的所有变量均不需剔除为止。利用这些变量可以建立多元线性回归方程。
建立变温过程中陀螺仪的零偏补偿模型,是快速控制零偏漂移的有效方法。当激光陀螺工作时,对陀螺内部温度传感器的输出值进行采样并传送到计算机系统。根据数学模型公式计算出对应的零偏补偿值,将陀螺的测量值减去零偏补偿值,便能得到陀螺理想的零偏精度。
3 实验与结果分析
3.1 数据采集
将某高精度机抖激光陀螺仪进行多次高低温变温实验,环境温度变化范围为-40℃~+65℃,原始采样数据按照国军标百秒平均计算陀螺精度,如图3所示。
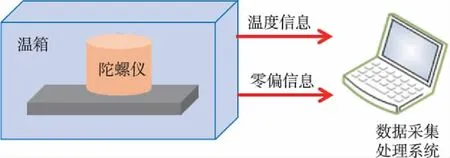
图3 激光陀螺测试系统原理图Fig.3 Schematic diagram of ring laser gyro testing system
陀螺仪通电正常启动后开启温箱,其中变温速率为1℃/3min,记录变温过程中的陀螺仪输出。本实验中,设置温度变化范围为-40℃~+65℃,覆盖了大部分陀螺的工作温度范围。
3.2 模型分析
在变温实验过程中,陀螺壳体温度T1、腔体温度T2、温变速率dT1/dt和dT2/dt、交叉项T1dT1/dt和T2dT2/dt、二次项(dT1/dt)2和(dT2/dt)2以及温度梯度等参数,会影响陀螺的输出零偏。下面根据式(2)中的逐步回归分析研究输出零偏与温度等参数是否相关以及如何相关,计算出线性多变量回归方程对陀螺零偏进行补偿。

利用matlab中的逐步回归工具stepwise(X,y)(其中X=(x1,x2,…x11),y为陀螺的输出零偏)对各个变量进行逐一的引进和剔除操作。其中x2,x4,x6,x8,x9,x10变量对零偏不显著,引入与否对结果的影响可以忽略。
当选取上述显著变量进行多元线性回归建模时,其回归结果如表1所示。Multiple R为回归的相关系数,用来衡量自变量x1,x3,x5,x7,x11与因变量y之间的相关程度。由表1可知,他们之间为高度正相关,R Square为复测定系数,以测定因变量的拟合效果,可见该因变量拟合效果较好,对于回归元的选择较成功。Adjusted R为调整后的复测定系数,说明该回归元能够说明因变量的97%;RMSE为标准误差,小于显著性水平0.05,此值越小表明数据拟合的越好;Significance F为显著性统计量。综上所述,考虑影响因素x1,x3,x5,x7,x11的回归方程对激光陀螺输出零偏的回归效果显著。

表1 多元线性回归结果
由上面的逐步回归分析可知,陀螺输出零偏值与温度、温变速率、温变梯度具有相关性。相关参数可通过逐步线性回归法得到,建立输出零偏的补偿模型如式(3)所示。
(3)
3.3 温度补偿结果
为了验证基于逐步线性回归的温度误差模型补偿方法的有效性,将该补偿模型分别应用于3台激光陀螺仪高低温试验数据的补偿中,补偿前后的零偏曲线如图4所示。
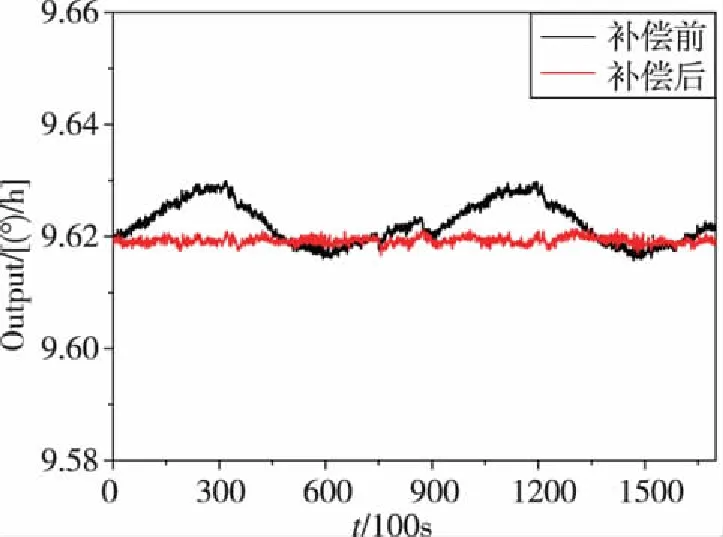
(a)陀螺1补偿前后的零偏输出值
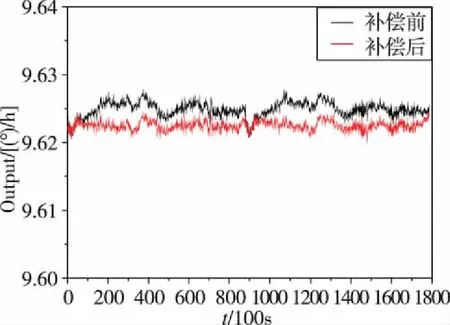
(b)陀螺2补偿前后的零偏输出值

(c)陀螺3补偿前后的零偏输出值图4 陀螺补偿前后的变温零偏输出值Fig.4 Output bias before and after temperature compensation
由图4可以看出,当采用本文提出的补偿模型后,3台激光陀螺仪的变温零偏稳定性提高了约65%,如表2所示,提高了激光陀螺对环境温度的适应能力,验证了本文提出方法的正确性和优越性。
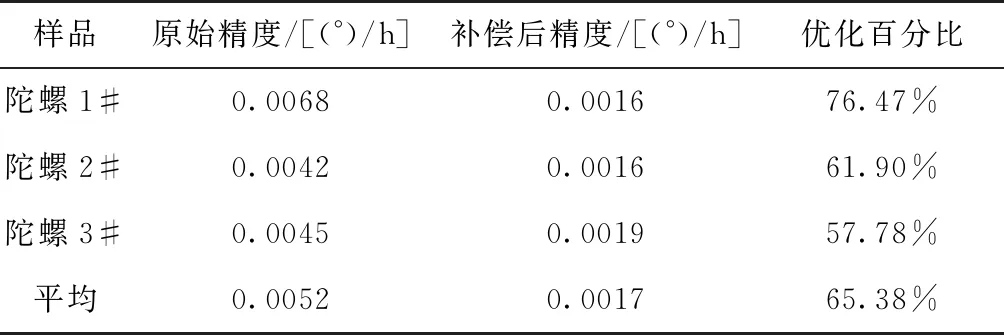
表2 三台陀螺仪补偿前后的变温零偏稳定性
4 结论
本文基于高精度机抖激光陀螺在外界变温环境下的零偏测试实验,确认了RLG的输出零偏值与陀螺仪的内部温度、温变速率和温度场的梯度有关,从构建温度补偿模型出发,利用逐步线性回归法对-40℃~+65℃范围内的漂移进行温度补偿建模,结果证明该温补模型可将RLG的变温零偏稳定性指标提高2倍左右,具有较强的工程应用价值。
猜你喜欢
科技创新与品牌(2022年7期)2022-11-15
导航定位学报(2022年4期)2022-08-15
沈阳农业大学学报(2022年2期)2022-06-04
北京航空航天大学学报(2021年9期)2021-11-02
科学与财富(2021年36期)2021-05-10
科学与财富(2021年32期)2021-03-07
发电技术(2020年3期)2020-06-29
热带农业科学(2018年2期)2018-06-21
中学生数理化(高中版.高一使用)(2018年2期)2018-04-04
江苏农业科学(2016年1期)2017-05-17
