
基于labview的智能拖地小车系统设计
2019-07-10 04:15余先哲韩剑刘赛栋
科技风 2019年9期
余先哲 韩剑 刘赛栋
摘 要:本系统设计通过单片机和传感器对车子进行自动辨别障碍物,从而判断汽车和障碍物之间的距离,从而来避免发生碰撞。智能自动拖地小车包括避障、人工操控等功能,初步的实现小车的智能化,通过几个传感器检测周圍的环境,来判断出前方是否有障碍物,再通过单片机来控制小车的运动方向,前进、转弯来对小车进行避障。在通过时间的设定完成定时拖地工作,整个系统与上位机labview开发的界面进行通信,人机界面良好。
关键词:labview;智能化;避障;检测
在工业生产和生活工作中,智能拖地小车能够根据预先设置的环境下自行进行工作、避障,不需要人为控制,就可以自行完成所要的目标。随着智能化的快速发展,智能拖地小车实现使用传感器检测路线和障碍并作出判断和相应的执行动作,智能拖地小车会让人们的生活更加多姿多彩,带来更多的方便和添加生活乐趣。
1 下位机硬件电路设计
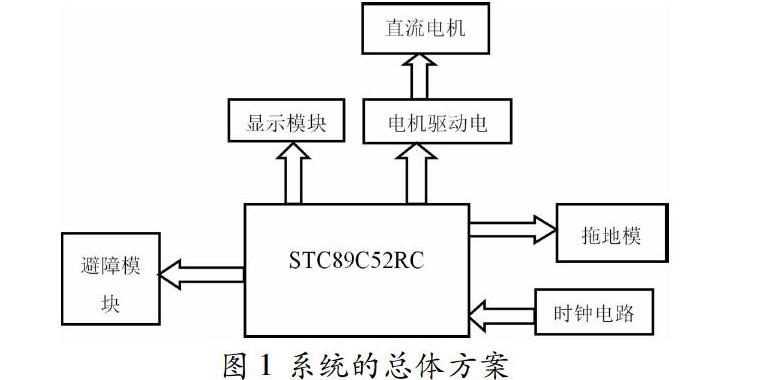
本设计的下位机以STC89C52RC单片机为核心的控制系统,用几个设计模块相结合,用单片机主控模块,利用红外测距,进行避障功能。通过硬件电路的设计,接着软件程序的编程来实现自动拖地小车的工作。每个模块看似独立工作的,但其中各模块又能合作工作。系统控制框图如图1所示,STC89C52RC单片机是控制显示模块、电机驱动模块、避障模块、拖地模块和与上位机labview上位机通信五个大模块组成的。
2 系统软件设计
2.1下位机单片机软件程序
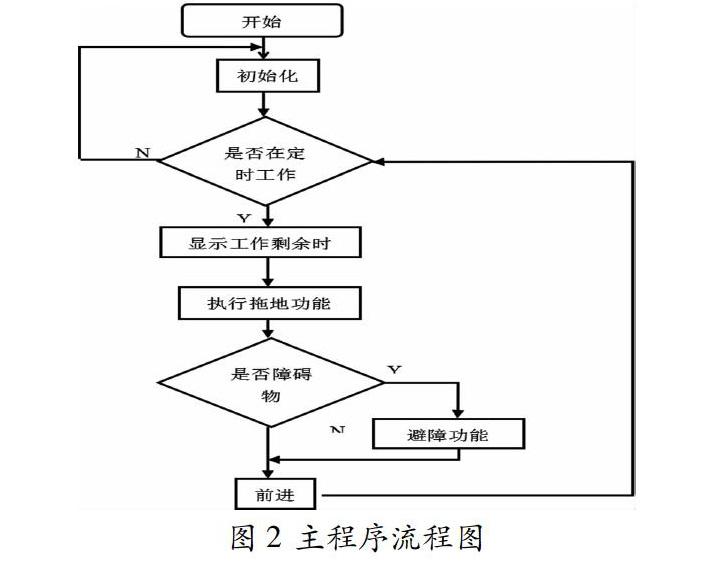
开始先对单片机和LCD1602液晶显示屏进行初始化设置,再判断是否有在定时工作,如果在定时工作范围内,就同时启动拖地装置并且通过红外探测头检测前方是否有障碍物,如果没检测到小车前进,开始循环流程,直到工作时间结束;当红外探测头检测到前方出现障碍物的时候,小车向没有障碍物的一方转弯,直到检测到没有障碍物为止,在继续执行程序的循环,直到工作时间结束如图2所示。
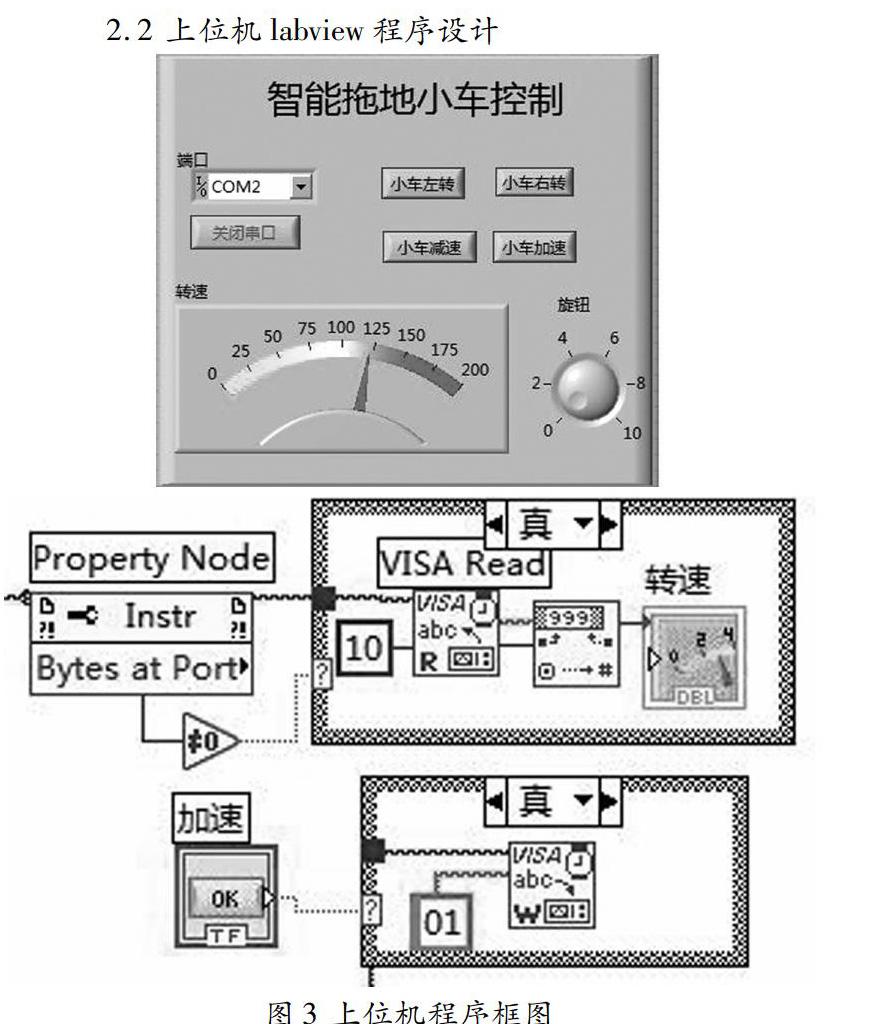
2.2 上位机labview程序设计
图3所示是基于LABVIEW的智能拖地小车系统的上位机程序,通过VISA函数使电脑上位机labview和下位机单片机进行通信,控制下位机单片机执行小车的一些操作指令。下位机进行小车速度数据采集,传输到上位机前面板上进行显示。上位机能够控制小车左转、右转、停止,开始拖地等命令功能。
参考文献:
[1]周海鹏.基于APP的智能小车控制系统设计与实现[J].现代信息科技,2018.8.
[2]李杰.基于单片机的超声波测距报警系统的设计[J].数字技术与应用,2018.9.
[3]申扣明,杨国平.基于单片机技术的自动循迹避障寻光智能小车系统设计[J].自动化应用,2018.9.
猜你喜欢
现代职业教育·高职高专(2022年14期)2022-05-01
课程教育研究(2021年9期)2021-04-13
福建基础教育研究(2019年1期)2019-09-10
福建基础教育研究(2019年1期)2019-05-28
时代英语·高一(2016年6期)2017-02-27
中国新技术新产品(2017年2期)2017-01-20
科技创新与应用(2016年34期)2016-12-23
中学生数理化·七年级数学人教版(2016年10期)2016-12-22
中学生数理化·七年级数学人教版(2016年10期)2016-12-22
电子技术与软件工程(2016年20期)2016-12-21
