不同变桨控制对海上风力机漂浮稳定性影响研究
2019-07-08 09:51:24丁勤卫郝文星周红杰朱海天韩志伟
振动与冲击 2019年12期
余 万, 丁勤卫, 李 春,2, 郝文星, 周红杰, 朱海天, 韩志伟
(1. 上海理工大学 能源与动力工程学院,上海 200093;2. 上海市动力工程多相流动与传热重点实验室,上海 200093)
风力机运行调节方式主要有定桨失速调节和变桨调节[1]。对于定桨失速调节,叶片与轮毂固定连接即桨距角固定不变,当风速变化时,风力机通过叶片翼型自身失速特性(升阻比的下降)以限制功率输出。变桨调节主要在两个风速段实现调节:①小于额定风速:叶片保持最优桨距角不变且通过调节发电机电磁转矩达到调节风轮转速,最终实现风力机在最佳尖速比下运行,以获得最大风能利用系数,输出最大功率;②大于额定风速:风力机通过改变桨距角且保持风轮转速不变,即改变风能利用系数以保持发电机以额定功率输出。变桨调节较之定桨失速调节,不仅能使得风力机处于最优运行状态且最大程度上提高发电效率,还可避免失速调节带来的机组运行不稳定和传动机构及叶片承受大扭矩和高应力的情况[2]。因此,现代大型化风力机通常采用变桨调节[3]。对于大型化风力机变桨控制调节的研究很多且相对应的技术较为成熟,不同研究成果均表明基于现代理论的干扰自适应控制(Disturbance Accommodating Control,DAC)较之传统比例积分控制(Proportional Integral Control,PIC)有着更好的控制性能[4-7]。
随着陆上风力机建设趋于饱和,漂浮式风力机为开发利用深海区域低湍流度且更为丰富的风能资源提供一种可行的办法。为此,风电场的建设业已成“由陆向海,由深向浅,由固定式向漂浮式”的必然趋势[8-10]。2009年6月,世界上第一个基于Spar平台的海上漂浮式风力机在挪威海深220 m区域安装成功[11]。目前,关于风力机变桨控制对漂浮式风力机平台动态响应影响的研究较少。Namik等[12-13]考虑湍流风及波浪载荷作用,设计状态空间变桨控制器及干扰自适应控制器,对比分析不同控制器对驳船式、张力腿式及Spar式三种不同漂浮式风力机的影响,但对于漂浮式风力机平台动态性能影响分析过于简单。Bagherieh等[14]采用线性参数时变控制方法(Linear Parameter Varying Control,LPVC),研究基于驳船式平台的漂浮式风力机在有无LPVC控制下的输出功率及运动性能,但控制效果不明显且对于驳船式平台运动分析简单。
海上漂浮式风力机(下简称海上风力机)与陆上风力机结构动态特性的最大区别为,前者具有漂浮特性即平台动态特性,同时海上风力机的漂浮稳定性是影响其获取深海区域风能的重要因素[15]。海上风力机叶片不同的变桨控制策略将会影响支撑平台的动态响应。因此,本文考虑湍流风及不规则波浪的作用,在Matlab/Simulink与开源软件FAST联合仿真平台上,设计干扰自适应控制器(DAC),并与FAST原有的控制策略对比分析,研究不同控制器对海上风力机漂浮稳定性影响。研究结果以期为设计更适合海上风力机的变桨控制器提供理论基础。
1 仿真模型
1.1 海上风力机主要参数
研究对象为基于Spar浮式基础海上风力机。风力机选用美国国家可再生能源实验室(National Renewable Energy Laboratory,NREL)的5 MW风力机样机,主要参数如表1所示;Spar浮式基础选用OC3-Hywind Spar平台,主要参数,如表2所示。
在环境载荷作用下,漂浮式Spar平台将会产生六个自由度方向的运动[18]。平动自由度:纵荡、横荡及垂荡;转动自由度:横摇、纵摇及艏摇,如图1所示。图中,X轴表示为风轮平面法向方向,βw为波浪入射角。
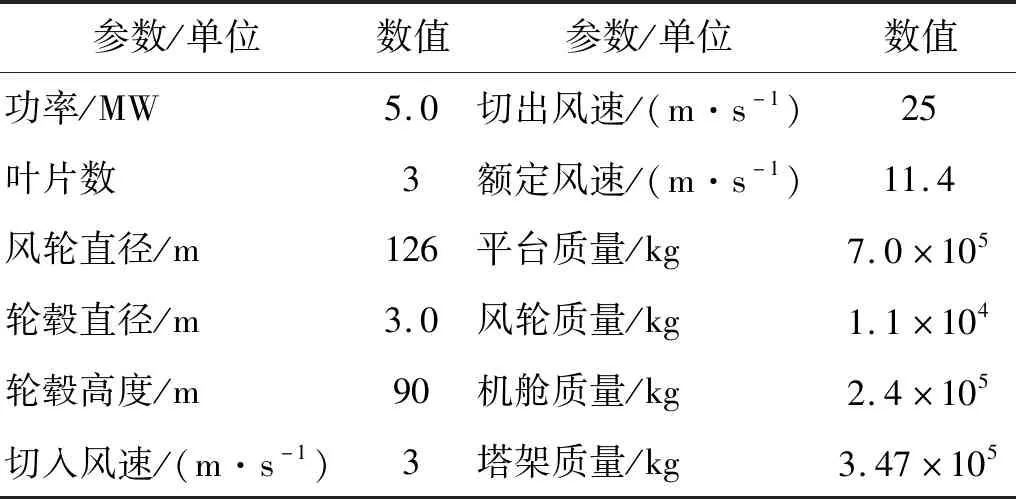
表1 NREL 5 MW 风力机样机主要参数[16]
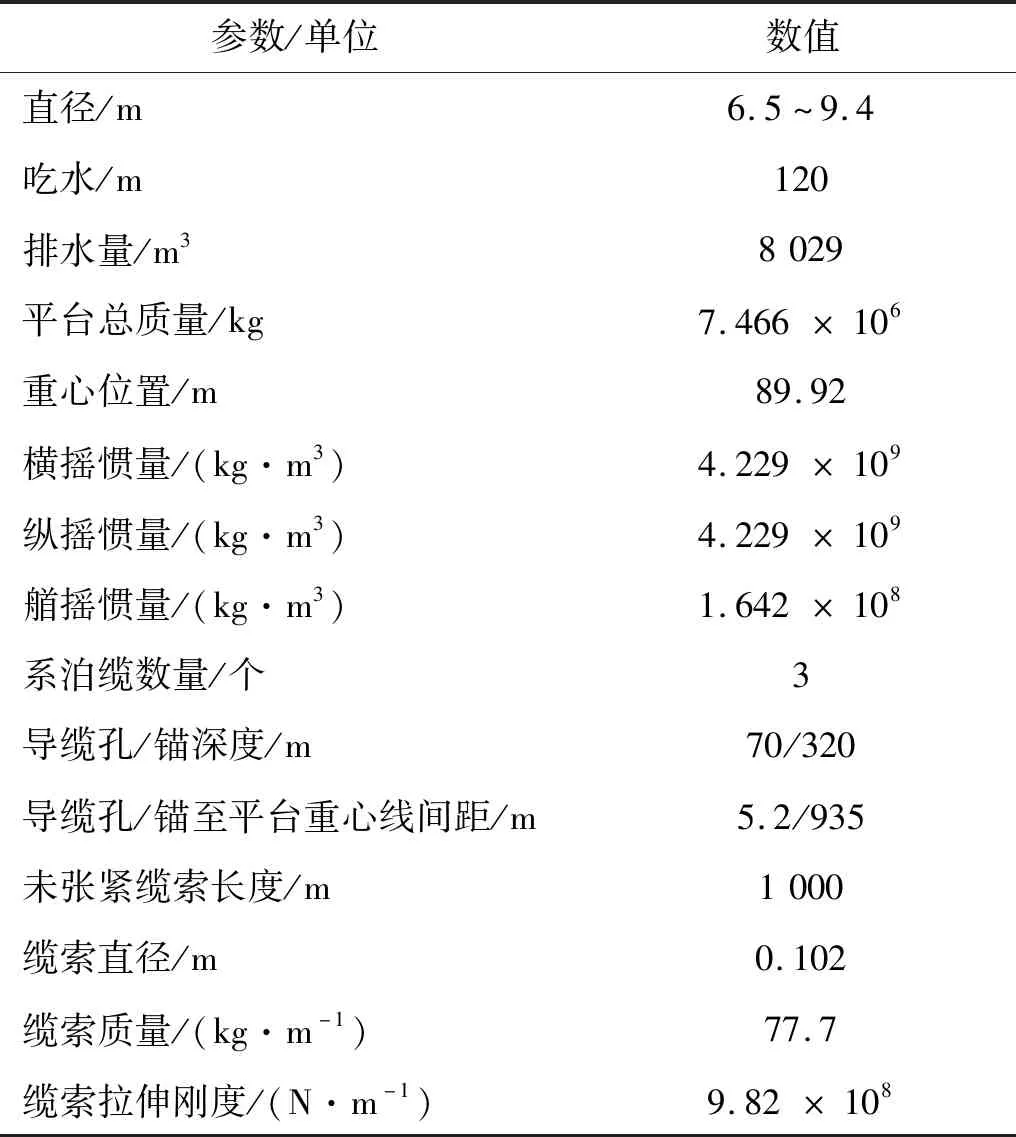
表2 OC3-Hywind Spar平台参数[17]
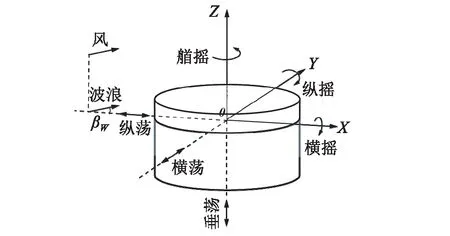
图1 平台运动自由度
1.2 风力机系统模型[5]
NREL 5 MW 风力机样机主要部件有:风轮、低速轴、变速箱、高速轴及发电机。其中,风轮是捕获风能的唯一部件,其获取能量的计算表达式为:
Pw=0.5ρπR2Cp(λ,β)v3
(1)
式中:ρ为空气密度;v为风速;R为风轮半径;Cp(λ,β)为风能利用系数,与桨距角β及尖速比λ有着非线性函数关系。
尖速比λ表达式为:
λ=ΩrR/v
(2)
式中:Ωr为风轮转速。
风轮气动力矩表达式为:
Tr=0.5πρR3v2Cp(λ,β)/λ
(3)
考虑低速轴为刚性体,则风轮及发电机的运动方程分别为:
(4)
(5)
式中:Jr及Jg分别为风轮及发电机转动惯量;Ωg为发电机转速;Tl、Th及Te分别为低速轴力矩、高速轴力矩及发电机电磁转矩;Cr及Cg分别为风轮及发电机外部阻尼。
变速箱的传动比为:
ng=Tl/Th=Ωg/Ωr
(6)
将方程(6)代入方程(4)和(5)得到风力机系统运动方程表达式:
(7)
1.3 风力机线性模型
开源软件FAST提供两种风力机非线性气动弹性的线性模型:符号法和数值摄动法。由于数值摄动法考虑了气动力的影响,故采用该方法建立风力机的线性模型。线性模型的建立步骤为:①在周期性稳态风下,FAST计算得到稳态结果;②针对运动方程中每个自由度引入数值摄动,构建偏微分方程;③求解偏微分方程可得到包含质量、刚度及阻尼矩阵的各种系数[19]。风力机的线性模型可描述为:
(8)
式中:x为状态向量;u为控制输入;ud为风扰动输入;y为输出向量;A为状态矩阵;B为控制输入矩阵;Bd为风扰动输入矩阵;C为输出状态矩阵;D为控制输入传输矩阵;Dd是风扰动输入传输矩阵。
2 风力机运行控制
2.1 运行控制原理
变速变桨风力机主要有三个运行区域,如图2所示:在区域1,风速小于风力机切入风速,风力机输出功率为零;在区域2,风速大于风力机切入风速,小于其额定风速,风力机控制目标是跟踪最优尖速比,获得最高的风能利用系数,输出最大功率;在区域3,风速大于风力机额定风速,小于其切出风速,风力机控制目标是跟踪其额定输出功率。
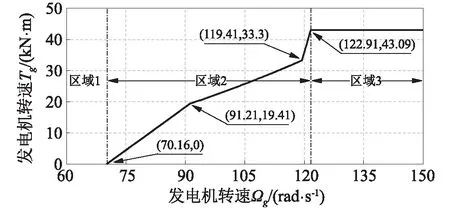
图2 风力机运行区域
对于风力机的运行控制策略主要有区域2及区域3。当风速小于额定风速即区域2时,通过控制发电机的转矩使风力机获取最多的能量,输出最大功率;当风速大于额定风速即区域3时,风力机通过改变叶片桨距角使得来流攻角产生变化,进而改变叶片风能利用系数,最终可控制风力机输出功率。
风力发电机转矩控制不属于重点研究内容,故根据FAST定义如图2所示的曲线图进行给定,曲线函数定义为:
(9)
风力机大于额定风速的叶片变桨控制作为重点研究对象。设计干扰自适应控制器,并应用于海上风力机运行区域3。FAST在对风力机系统线性化时需要设定稳态点,本文选择的稳态点为风速18 m/s、风轮转速12.1 r/min及桨距角为14.74°。
2.2 FAST控制策略
在运行区域3的控制目标是通过叶片的桨距角变化以维持风轮转速在稳态点风轮转速。FAST控制采用传统PI控制,对应着单输入单输出的情况。将其与稳态值的偏差作为输入,故桨距角变化量可定义为:
(10)
式中:δβ为桨距角偏差;Kp、Ki及KD分别为比例、积分及微分系数;δΩr为风轮转速的偏差。
通过开源软件FAST对稳态点进行线性化模拟,可得到:
(11)
式中:δv为风力机轮毂高度处的风速扰动量。
将方程(10)代入方程(11)同时在Laplace变换域内变换,可得到PI控制系统的传递函数为:
(12)
对于具有稳定性的闭环系统,传递函数的分母项的根位于复平面的左侧即有负实部的根,因此要求分母项各系数项都大于零:
(13)
将传递函数分母转换为一般形式可得:
s2+2δωs+ω2=0
(14)
式中,ω为频率;δ为阻尼比;δ和ω表达式为:
(15)
根据方程(15)可求得Ki及Kp表达式为:
(16)
在高风速区域,桨距角的微小的变化将会导致转矩产生很大波动。通常采用控制器增益调度技术用于补偿转矩这种波动,增益调度系数GK定义为:
(17)
式中:β为桨距角;KK为常数,在FAST控制策略中取为0.109 965。
图3为依据FAST控制策略搭建的PI控制Simulink模型。
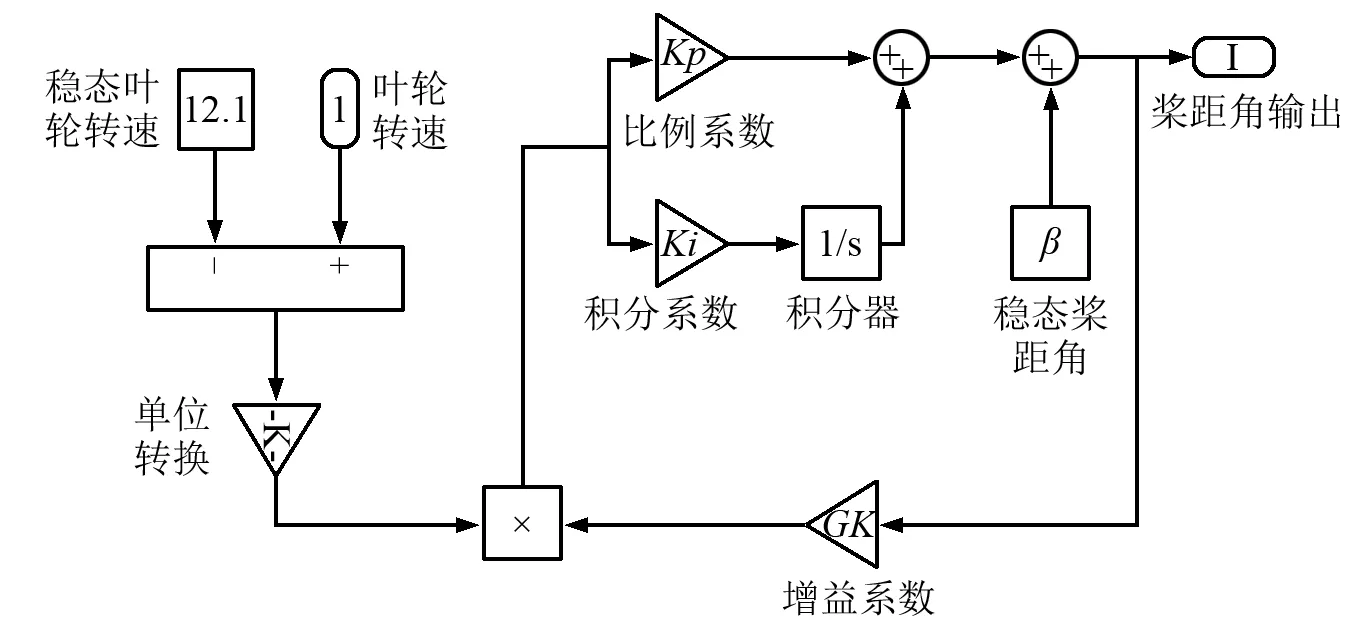
图3 FAST的Simulink模型(KD=0)
在Simulink模型中,根据风力机输出某一时刻的风轮转速并与稳态点风轮转速及增益系数的关系可以得到系统输入偏差,且通过比例及积分系数可获得系统输出偏差即桨距角偏差值,最终可得到该时刻的桨距角。在FAST控制策略中,比例系数为0.608 68,积分系数为0.086 962。
2.3 干扰自适应控制
2.3.1 全状态反馈控制
在风力机线性模型中对控制输入u构建反馈法则:
u=Gx
(18)
则开环系统与反馈法则所构成闭环系统方程为(忽略扰动输入):

(19)
闭环系统的稳定性取决于反馈矩阵G的确定。在闭环系统中,可通过系统的极点配置即矩阵A+BG特征值的设定从而选择反馈矩阵G。对于控制系统具有可控性即矩阵A和B满足方程(20)时,闭环系统的极点可任意配置。
Rank[B∶AB∶A2B∶…∶An-1B]=n
(20)
在风力机的控制设计中,极点配置对系统有极大的影响。当极点的实部位于复平面的左侧不仅可调节风轮转速或者风力机输出功率,还可对低阻尼的柔性振动提供额外阻尼。
图4为全反馈控制器示意图。在风力机的控制过程中,全状态反馈要求能够测量得到控制系统中所有状态在工程实际中很难实现。为此,在风力机的控制系统中需要通过状态观测器估计状态量。
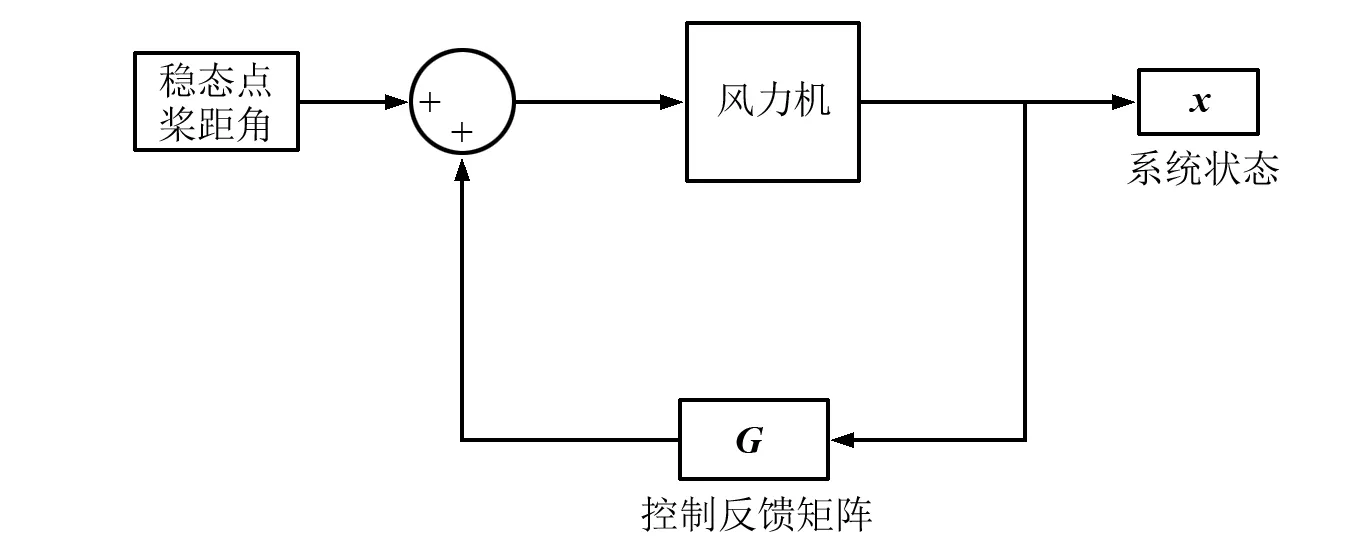
图4 全反馈控制器示意图
风力机输出某一时刻系统状态量,根据控制反馈矩阵即可求得桨距角的偏差值。
2.3.2 状态观测器
状态观测器以全反馈控制为基础且通过系统空间状态模型输出估计的系统状态。忽略扰动量,状态观测器数学模型为:
(21)

实际系统状态与系统状态估计值之间的误差可表示为:
(22)
对状态误差求导可表示为:
(23)
对于矩阵Kx采用与反馈矩阵G的相同求解方法。不同得是需要判断系统是否具有可观性,即矩阵A和C满足方程(24)时,极点可任意配置即对于矩阵A-KxC的特征量可任意设定。
(24)
具有状态观测器的全状态反馈控制,如图5所示。
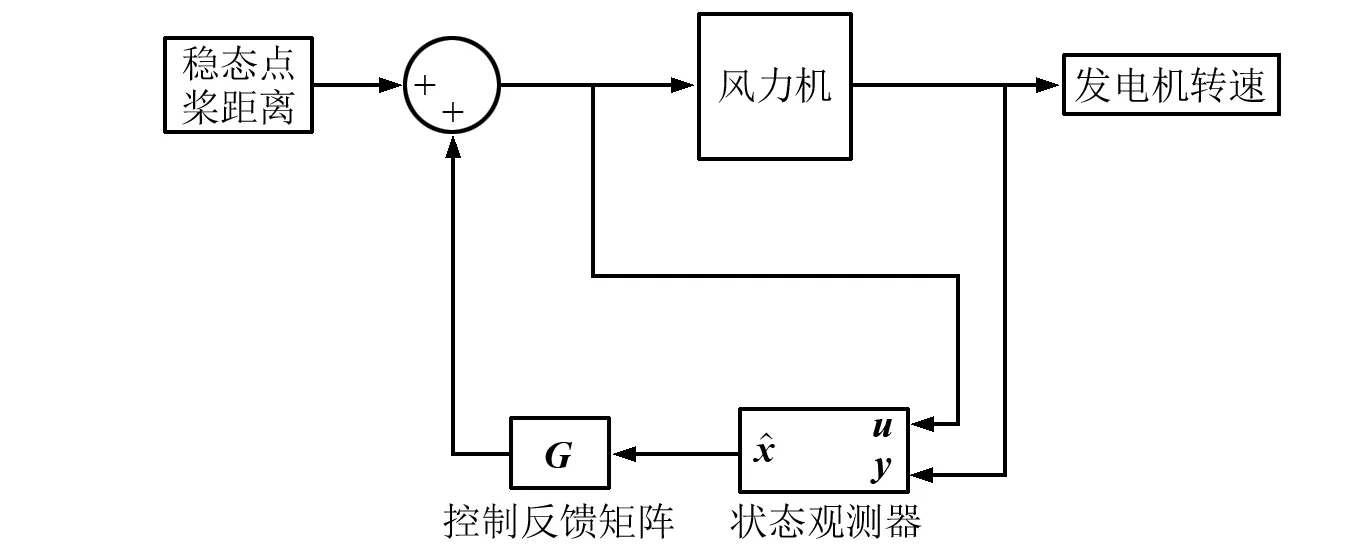
图5 状态观测器控制示意图
考虑到风力机系统中各个系统状态量在工程上测量难以实现。因此,采用易测量的状态值,并利用状态观测器估计系统各个状态量,再根据控制反馈矩阵可求得桨距角的偏差值。
2.3.3 干扰自适应控制
在风力机运行过程中,湍流风会引起叶片的气动力波动从而影响风力机的输出功率、扭矩及其载荷[20]。为此,基于全状态反馈控制及状态观测器控制实现干扰自适应控制。干扰自适应控制通过干扰波模型构建扰动状态;扰动状态用于状态反馈中以减小或抵消扰动作用。干扰波模型发生器设计为:
(25)
式中:zd为干扰状态;F和θ为根据干扰特性确定的已知矩阵,本文选取及。
在全状态反馈的基础上,考虑干扰状态,构建反馈法则为:
u=Gx+Ddzd
(26)
将方程(26)代入全状态反馈控制(考虑扰动输入)可得:
(27)
状态反馈中扰动状态作用为减小或抵消干扰作用,故要求min(BGd+Bdθ)最小,则可得到Gd。
在干扰自适应控制中构建的干扰状态与全状态反馈控制中系统状态相同,需要基于状态观测器估计干扰状态。采用干扰自适应控制的基于状态观测器的全状态反馈控制器数学模型为:
(28)
状态估计值与实际状态值之间的误差为:
(29)
与方程(29)同理,可得估计误差的状态方程:
(30)

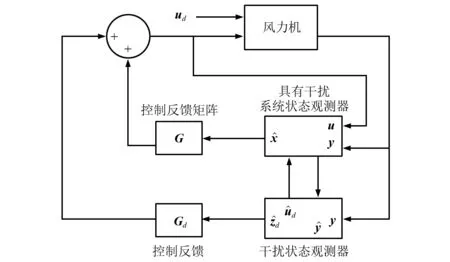
图6 干扰自适应控制示意图
为考虑风扰动作用,故将风扰动输入作为一个系统状态量,并采用干扰状态观测器评估该状态量,再通过反馈矩阵求解得到桨距角的偏差值。
4 结果与分析
选取平均风速18 m/s的湍流风,风速时间曲线如图7(a)所示。波浪谱选取P-M谱,有义波高为3.673 m,跨零周期为13.376 s,波浪入流角度为0°,波浪高度时间曲线如图7(b)所示。
在以上载荷激励下,采用DAC对海上风力机叶片桨距角控制,并与FAST所采用的PI控制策略进行对比分析。
4.1 海上风力机控制效果分析
在DAC及FAST控制策略下,海上风力机控制效果如图8所示。其中,图8(a)为两种控制策略下桨距角曲线图;图8(b)为对应控制策略下风力机风轮转速曲线图;图8(c)为风力机输出功率曲线图。
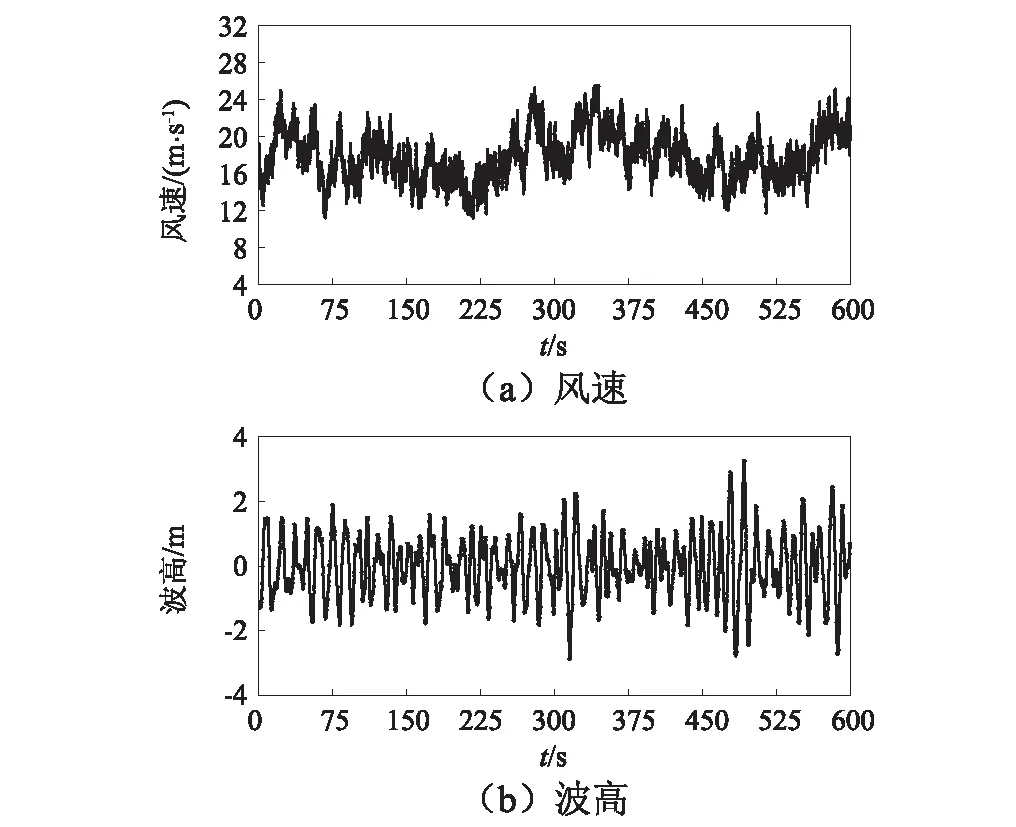
图7 风和波浪曲线
由图8可知,FAST控制策略桨距角曲线波动最小,其控制得到的风轮转速及输出功率控制得到的波动较大;DAC桨距角波动大,其控制得到的风轮转速及输出功率波动最小。表3为不同控制策略下海上风力机桨距角、风轮转速及输出功率均方根及标准差。
根据表3可知,FAST控制策略得到的桨距角、风轮转速及输出功率均方根与稳态值相对误差分别为-0.875%、0.413%及-6.930%,DAC控制策略得到的相对误差分别为-2.354%、-0.165%及-2.795%;在DAC控制策略下的桨距角、风轮转速及输出功率的标准差与FAST控制策略相对误差分别为36.117%、-56.432%及-44.066%。因此,尽管DAC较之于FAST得到的桨距角与稳态值相对误差较大,标准差大,但DAC因其具有尽快适应风速的变化的特点使海上风力机风轮转速波动更小,输出功率更加稳定,故对海上风力机的控制效果更好。
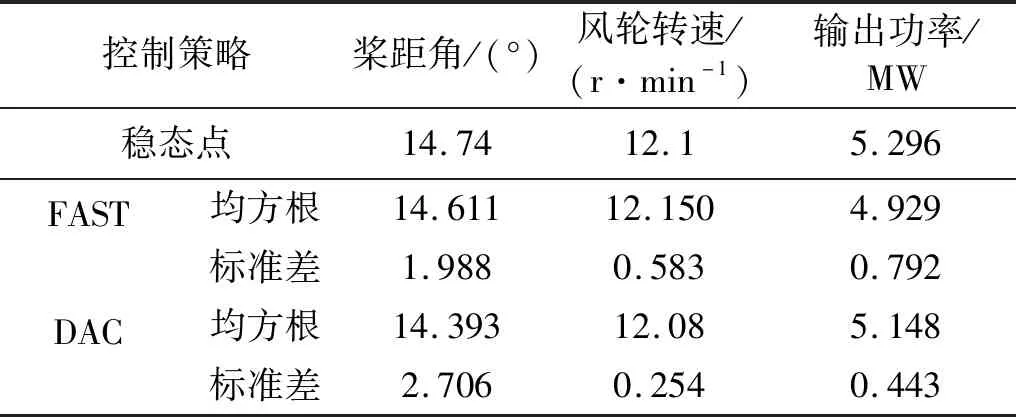
表3 不同控制策略下统计参数
4.2 海上风力机漂浮稳定性时域分析
较之陆上风力机,海上风力机的漂浮稳定性是影响开发利用深海区域风能的重要因素。海上风力机在区域3内变桨控制会导致系统结构上部风轮所受载荷发生变化,此将会进一步影响其结构下端漂浮式平台动态响应,即海上风力机漂浮稳定性随之变化。因此,在开发风力机控制策略必须考虑其对于海上风力机漂浮稳定性的影响,从而达到既能保持以额定功率输出,又可提高平台稳定性的目的。图9为两种不同控制策略下海上风力机支撑平台六个自由度动态响应曲线图;曲线图左下角三维坐标标记对应着自由度方向,例如在平动自由度纵荡方向上,平行于实线X轴的双箭头直线表明其沿轴做平动运动;在转动自由度横摇中,垂直于实线X轴的双箭头直线表明其绕轴做转动运动。

图8 海上风力机控制效果图
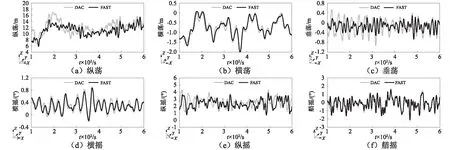
图9 平台动态响应
由图9可知,在纵荡方向上,由于风及波浪作用,平台会产生很大的动态响应,在FAST控制策略下,动态响应具有较小的波动,在DAC控制策略下有着较大的波动;在横荡方向上,对比两种控制策略,动态响应曲线差别较小;在垂荡方向上,较之FAST,DAC控制策略下的动态响应较大;在横摇方向上,两种控制策略下的动态响应曲线差别较小;在纵摇方向上,较之于FAST,DAC控制策略下的动态响应较大;在艏摇方向上,两种控制策略得到的动态响应曲线差别不明显。进一步定量分析海上风力机漂浮稳定性,给出如图10所示的不同控制策略下平台各自由度动态响应的均方根及标准差。
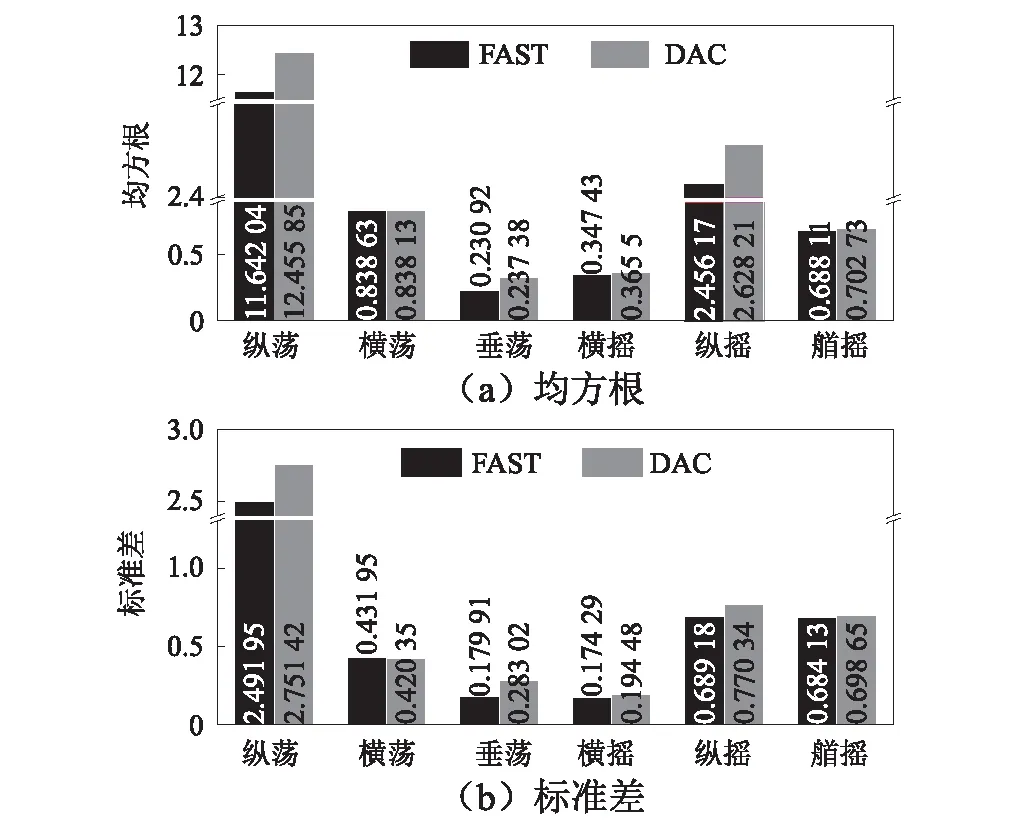
图10 平台动态响应的均方根及标准差
由图10可知,在横荡、垂荡、横摇及艏摇方向上不同控制策略对其影响较小;纵荡及纵摇方向上,较之FAST,DAC作用下的均方根分别增大6.99%及7.00%,标准差分别增大10.41%及11.78%。因此,不同控制策略对于海上风力机的影响主要集中在纵荡及纵摇方向。
4.3 海上风力机漂浮稳定性频域分析
海上风力机在纵荡及纵摇方向的漂浮稳定性受不同控制策略影响很大。对纵荡及纵摇方向的时域曲线进行傅里叶变换,可得如图11所示的频域范围内幅值曲线。
根据图11可知,对于Spar平台,在纵荡及纵摇方向上的固有频率分别为0.008 Hz及0.032 Hz;较之于DAC,海上风力机纵荡及纵摇在FAST控制策略下在固有频率点有着更小幅值,特别是在纵摇方向固有频率点,无论是纵摇方向还是纵荡方向,在FAST控制策略下都有着更小的幅值。因此,在海上风力机的变桨控制策略设计时应该首先避免其纵摇方向的固有频率以提高海上风力机漂浮稳定性。
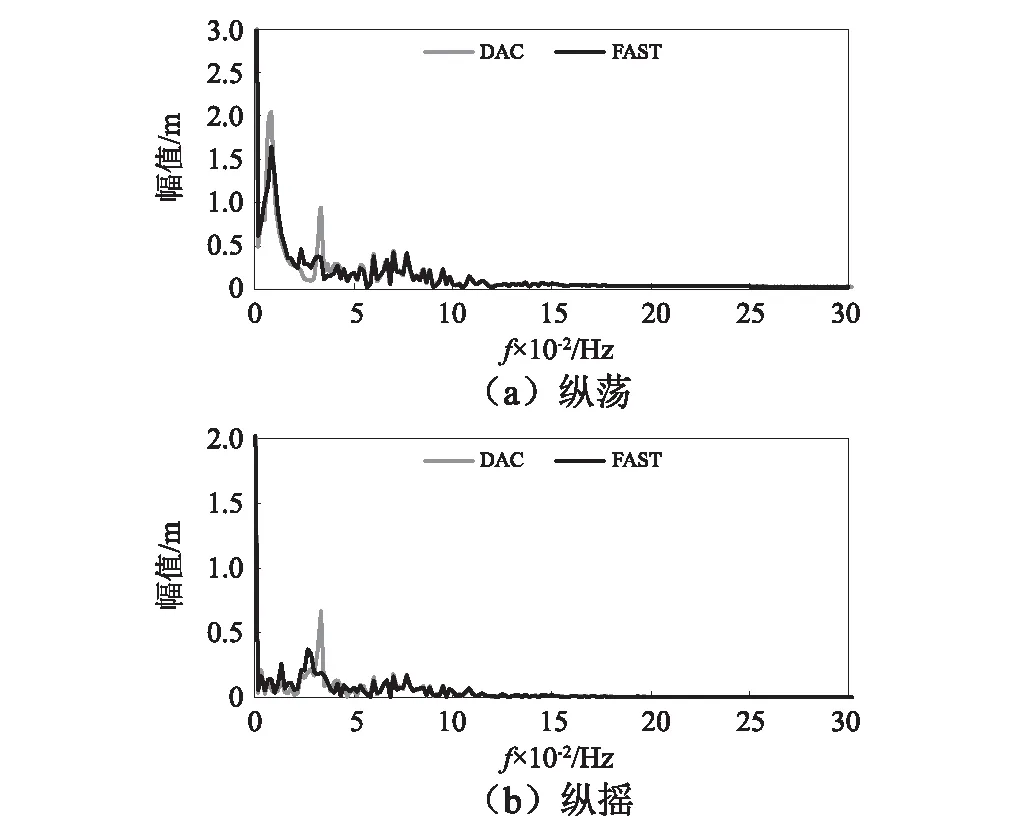
图11 频域曲线
5 结 论
基于FAST与Matlab/Simulink联合仿真平台,建立DAC控制策略,并与FAST原有的控制策略对比分析不同控制策略对海上风力机控制效果,且研究不同控制策略对基于Spar平台的海上风力机漂浮稳定性的影响,可得如下结论:
(1)较之于FAST控制策略,海上风力机在DAC控制风轮转速及输出功率更稳定,但漂浮稳定性较差。
(2)不同控制策略主要影响海上风力机的纵摇及纵荡两个方向的动态响应,对于其他方向的动态响应影响较小。
(3)在纵摇方向固有频率点,较之于DAC,海上风力机纵摇及纵荡在FAST控制策略下都有更小的幅值,故在海上风力机的变桨控制策略设计时应该首先避免其纵摇方向的固有频率以提高海上风力机漂浮稳定性。
猜你喜欢
电力科学与工程(2022年9期)2022-10-10 03:20:36
电力建设(2022年7期)2022-07-04 02:50:50
东方汽轮机(2020年3期)2020-11-04 11:07:34
太阳能(2019年10期)2019-10-29 07:25:08
中医眼耳鼻喉杂志(2019年2期)2019-04-13 05:23:46
大电机技术(2018年4期)2018-09-26 03:11:38
通信电源技术(2016年1期)2016-04-16 04:57:28
电源技术(2016年2期)2016-02-27 09:05:15
电机与控制应用(2015年3期)2015-03-01 03:49:52
电气传动自动化(2014年6期)2014-03-20 13:36:22