简化模型下基于Terminal滑模的纵向着舰控制律设计*
2019-07-08 01:54
舰船电子工程 2019年6期
(91404部队 秦皇岛 066000)
1 引言
舰载机着舰具有非常高的风险性,舰载机驾驶员完成艰巨的作战任务后心神疲惫,并且在着舰过程中还会受到型误差、舰岛尾流扰动、航母横纵摇等因素的影响,导致人工着舰难度很大,由此自动着舰技术应运而生,其中舰载机着舰控制系统(Automatic Carrier Landing System,ACLS)[1]在自动着舰过程中发挥着至关重要的作用。舰载机着舰控制系统要实现精确着舰的目标,最重要的一点是要具有较快的响应速度及较强的鲁棒性。
传统的PID控制结构简单、易于工程实现,但是其参数设计在一定程度上依赖于试凑和经验[2],其参数无法随舰载机姿态改变而调整,所以系统的鲁棒性较差。滑模控制[3]是一种变结构的控制方法,它可以使系统在滑模面上作小幅滑动模态运动,处于滑模运动的系统具有很好的鲁棒性。由于滑模控制具有较好的快速性与一定的鲁棒性,很多学者对其在飞行器姿态控制器中的应用进行了研究[4~5]。
考虑到滑模面中引入积分项,有利于减少静差,而Terminal滑模的有限时间到达特性[6~7],又能进一步提高系统的响应速度。因此本文以F/A-18A舰载机为研究对象,提出一类由误差、误差积分、误差Terminal项综合而成的积分型Terminal滑模控制方法,以进一步提高飞行俯仰通道姿态控制的品质,然后根据Lyapunov稳定性理论分析其稳定性,最后采用Matlab/Simulink仿真验证该Terminal滑模控制方法的正确性和有效性。
2 模型描述
在设计舰载机着舰控制系统时,必须考虑舰上着舰等特点,与飞机陆上着陆有一个平飘过程不同,舰载机采用等角下滑的方式进行着舰[8],也就是说着舰控制系统如果能使舰载机下滑的姿态角保持恒定[9],就可以帮助舰载机精确着舰,保证着舰安全。
考虑到舰载机着舰过程中,舰载机处于等下滑角的直线运动状态,并且飞行速度较慢,因此可以认为舰载机在此时的气动特性是线性的。首先对舰载机着舰过程进行受力分析,舰载机在着舰过程中主要受到自身的重力、发动机推力、空气阻力及升力,如图1。
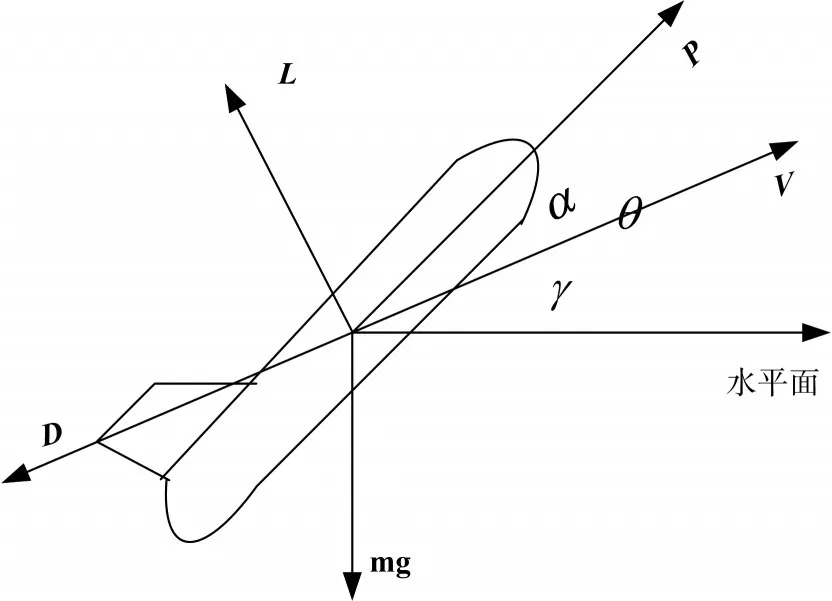
图1 舰载机受力分析图
根据舰载机受力情况,可得到如下动力学方程:
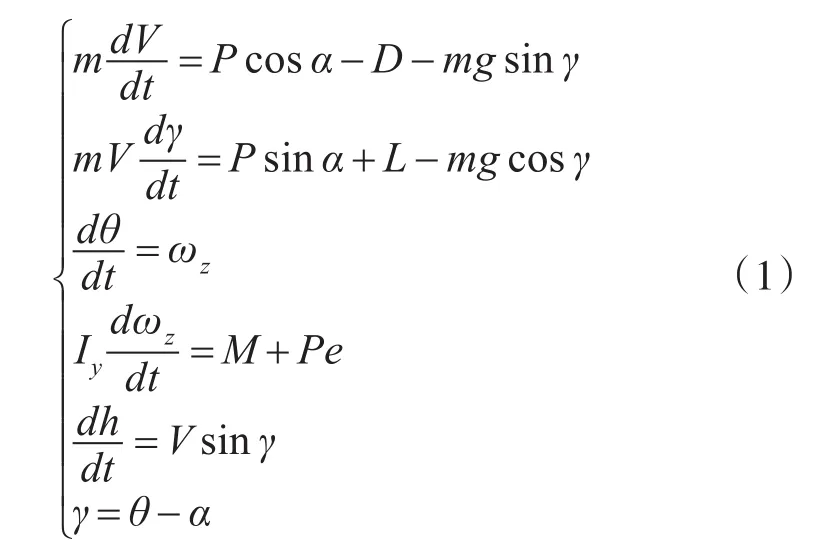
其中,m是舰载机质量,γ是速度倾角(航迹高低角),P是发动机推力,D是气动阻力,L是气动升力,g是重力加速度,Iy是俯仰转动惯量,M是气动俯仰力矩,e是推力偏心距,v为舰载机的飞行速度,α为舰载机的迎角,θ为舰载机的俯仰角,ωz为舰载机的俯仰角速度,h为舰载机的高度,δp为舰载机的油门杆偏转角,δz为舰载机的升降舵偏转角。
由动力学方程可推出舰载机着舰过程中的纵向控制状态方程,可描述为

其中x=[v,α,ωz,θ,h]T,u=[δp,δz]T。
3 Terminal滑模控制律设计
Terminal滑模由于在机理上具有有限时间到达原点附近邻域的特性,比传统的PID控制,具有优越的收敛特性,引起了广大学者的注意[10~11]。
假设舰载机着舰过程中各个控制变量的期望为xd=[vd,αd,ωzd,θd,hd]T。
为减少静差与加快响应速度,设计一类积分型Terminal滑模面为

其中ωz=,Ω 为Terminal项,为避免控制奇异,选取

假设在控制律的作用下,滑模面到达0,则有:

考虑到舰载机着舰过程中舰载机姿态角基本保持恒定,设计反馈误差:e=θ-θd,则有=。
则可以得到整理为

进一步整理得:

选取Lyapunov函数为

求导得:

又由上述滑模面定义得:
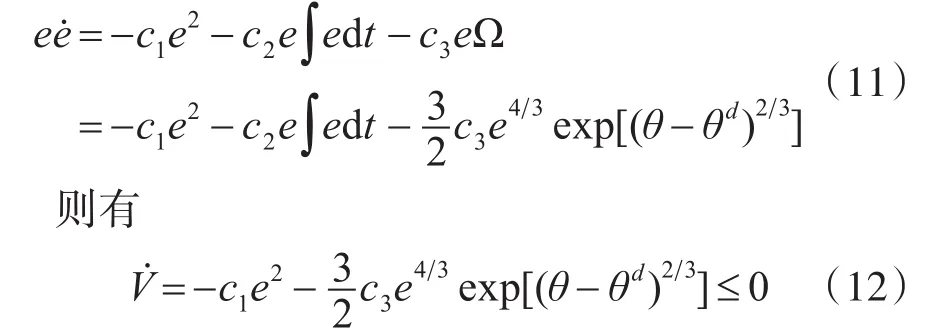
显然当滑模面到达0后,取c1≥0,c3≥0可以保证e→0,则表明上述积分型Terminal滑模面设计是合理的。
对上述积分型Terminal滑模面求导得:
采用控制量的解耦设计,即δz控制垂向运动,δp控制前向运动,则设计:

此时选取控制系数a0足够大,可以保证系统的局部有界。考虑给定状态x在局部区域内有|x|<d,此时有a31+a32有界,则存在足够大的a0使得Lyapunov函数导数小于0,从而系统稳定。
4 仿真实验
为了验证本文提出的舰载机着舰控制律的有效性和实用性,本文以F/A-18A舰载机为研究对象[12],界扰动,分别采用本文提出的控制方法与传统的PID控制方法进行仿真,两者的仿真结果如下。
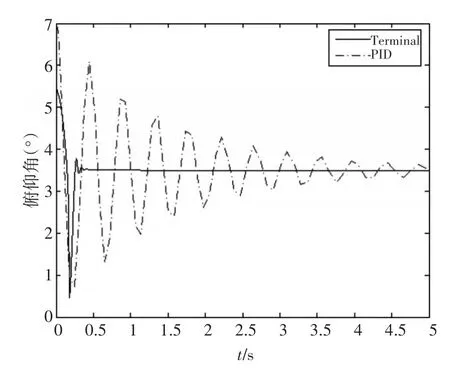
图2 舰载机俯仰角
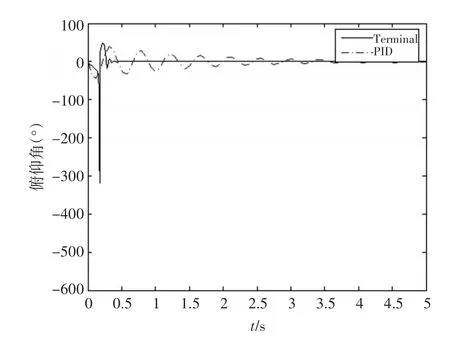
图3 舰载机俯仰角速度

图4 舰载机飞行高度
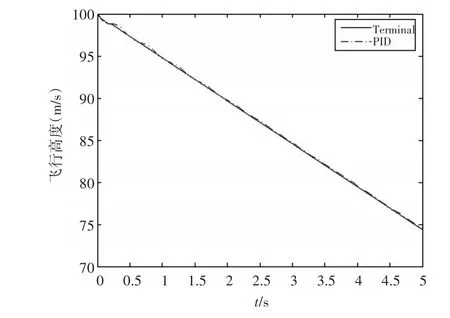
图5 舰载机飞行速度
以上仿真曲线中实线表示采用积分Terminal滑模控制方案仿真结果,虚线表示传统PID控制方法仿真结果,从俯仰角响应曲线可知,采用积分Terminal滑模方法具有静差小响应快的优点。
5 结语
本文在舰载机着舰姿态模型的基础上,提出了一类新颖的积分Terminal滑模,从理论上证明了该滑模面的合理性。同时由于积分的引入,系统静差大大减少,而Terminal滑模的引入,大大加快了系统的响应速度。在控制器增益相同,所有初始条件完全一致的情况下,通过仿真比较分析,可以明显看出积分Terminal滑模确实具有更好的快速性与更小的静差。通过仿真结果表明该方法比较适合舰载机着舰过程的姿态跟踪控制。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
建材发展导向(2021年14期)2021-08-23
科技研究·理论版(2021年22期)2021-04-18
科技创新与应用(2019年17期)2019-06-09
电脑知识与技术(2016年28期)2016-12-21
汽车科技(2016年5期)2016-11-14
科技视界(2016年16期)2016-06-29
科技致富向导(2013年21期)2013-12-10