星载激光雷达森林探测进展及趋势
2019-07-05 02:38李增元陈博伟梁晓军
上海航天 2019年3期
庞 勇,李增元,陈博伟,梁晓军
(中国林业科学研究院资源信息研究所,北京 100091)
0 引言
由于森林的重要性、森林资源分布的广泛性和森林生态系统的复杂性,森林资源的监测和评价需要遥感技术提供定性和定量数据。星载激光雷达兼具激光雷达垂直信息刻画的优势和大范围数据获取的特点,在大区域尺度的森林参数定量反演方面优势较大,是世界各主要遥感机构重点发展的森林探测传感器之一。
星载激光雷达森林观测的标志是1996年和1997年美国国家航空航天局(NASA)在航天飞机上搭载的全波形激光雷达(SLA-1/2)进行的对地观测,展现了星载激光雷达反演植被参数的潜力[1]。其后在2003年发射了第1颗可用于植被观测的ICESat(ice, cloud, and land elevation satellite)卫星,该卫星搭载了全波形激光雷达载荷——地球科学测高系统(GLAS)。2018年NASA又陆续发射了光子计数的ICESat-2 ATLAS卫星和搭载在国际空间站(ISS)平台上的GEDI(global ecosystem dynamics investigation)全波形激光雷达等。欧洲也论证过Carbon-3D,LEAF(lidar for earth and forests)等激光雷达为主载荷的卫星概念,日本也在积极论证并实施基于ISS平台的多波束激光雷达(MOLI)系统,我国正在实施的高分七号卫星、陆地生态系统碳监测卫星等也将搭载适用于植被探测的全波形激光雷达载荷。
本文针对全波形、光子计数、成像观测3种典型的森林探测激光雷达,从技术特点和林业应用进展方面进行了总结分析。
1 全波形激光雷达
1.1 雷达简介
全波形激光雷达是对目标地物接收到激光发射脉冲后返回的能量进行完整采样记录的系统。记录的数据为激光雷达全波形数据,包括地物垂直方向上不同位置处返回的能量信息。波形的采样间隔(即距离分辨率)取决于回波记录的时间间隔(即时间分辨率),反映了激光点内物质被感知的详细程度。大光斑激光雷达森林回波波形如图1所示。森林的激光回波波形指示从树顶开始,通过树冠、林下植被,最后是地面回波的森林垂直结构。
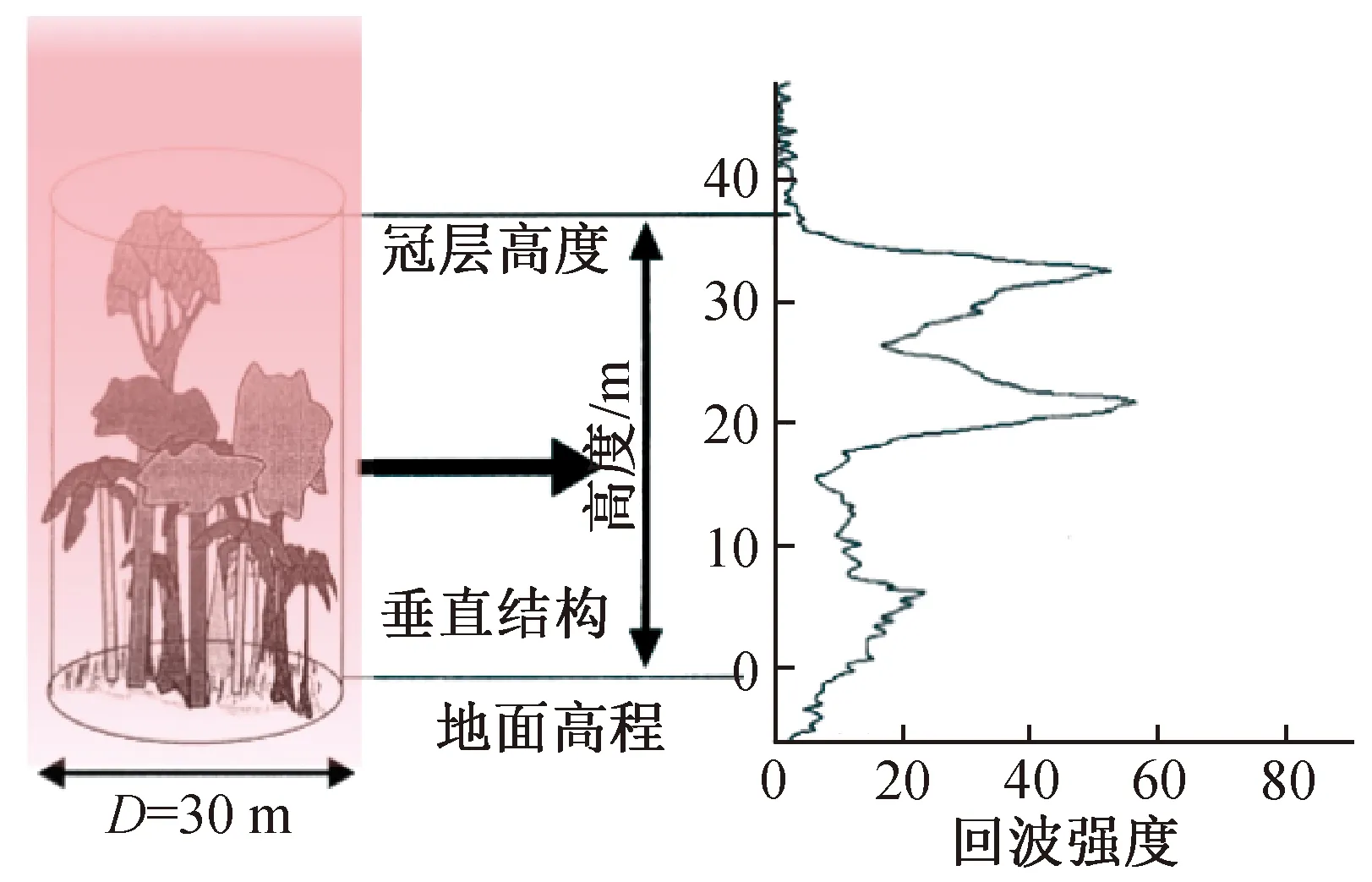
图1 大光斑激光雷达森林回波波形示意图Fig.1 Schematic map of forest echowaveform of large footprint
激光回波波形是由发射脉冲和激光光斑内的森林、地面共同决定的。前者包括工作波长、脉冲宽度、脉冲能量、光斑尺寸和记录回波脉冲的时间间隔;后者包括激光光斑内每棵树的位置、高度、树种、树冠大小和形状、冠层反射率,以及地表的反射率、坡度、坡向等参数。这些因素可通过构建激光雷达的森林回波模型进行刻画。SUN等[2]将森林生长模型与激光雷达波形模拟模型相结合,模拟了多种情况下森林的激光雷达回波,并利用实际森林的机载激光雷达数据对模型进行了验证。庞勇等[3-4]在文献[2]模型的基础上进行了改进,使之可以模拟复杂地形条件下不同空间格局森林的回波波形,并进一步研发了倾斜入射的激光雷达森林回波模型[5]。该模型充分考虑了激光发射脉冲的入射角和方位角,以及被观测森林在山地情况下的坡度和方位角。模拟显示:随着入射角的增大,森林参数反演能力有所降低,方位角对回波波形也有一定影响。本文基于模拟结果提出了星载全波形激光雷达森林观测的最优光斑尺寸直径为20~30 m,入射角度小于8°。
1.2 全波形激光雷达进展及林业应用
全波形激光雷达森林参数反演的出发点来自森林回波的波形数据,如图1所示。通常需要进行波形分解、地面和植被回波判识、波形指数计算,进而基于波形指数建立森林参数的反演模型,进行参数估计。
早期的星载波形激光雷达都是基于机载模拟系统进行方法研究。LEFSKY[6]和HARDING[7]使用机载激光雷达SLICER(scanning lidar imager of canopics by echo recovery)数据重建了阔叶林的冠层垂直分布,与地面实测结果十分接近。DUBAYAH等[8]提出了星载植被激光雷达系统(VCL)计划,该计划利用机载实验系统(LVIS)在美国、加拿大、澳大利亚等多个国家进行了成功的实验,验证了星载大光斑波形激光雷达技术适用于各种典型的森林类型[9]。
2003年1月,NASA发射了第1颗全波形激光雷达卫星ICESat,卫星上搭载了GLAS,激光光斑直径约为70 m,沿轨方向光斑间隔170 m。由于GLAS激光器的工作寿命远短于设计寿命,3个激光器观测时采用了互备份、间歇式的工作方式。至2009年ICESat卫星服役结束,获取了覆盖全球18个观测周期的数据。表1为ICESat GLAS不同观测周期获取的数据。表中数字表示激光器的编号,该卫星上有3个激光器,互为备份。每个激光器均采用间歇方式工作,每个观测周期用激光编号+英文字母表示,英文字母代表传感器的观测任务顺序。如1a表示第1个激光器的第1次观测。

表1 ICESat GLAS观测周期和时段
ICESat GLAS数据广泛用于反演区域尺度的森林高度与生物量等参数[10-12]。LEFSKY等[13]利用GLAS和航天飞机雷达测图计划(SRTM)数据成功估计了亚马逊和北美几个试验区的森林高度,进一步研究提出了基于GLAS波形参数自身计算波形前沿上升速度和下沿下降速度对地形影响进行校正的方案,使GLAS数据能更好地应用于大范围的森林参数反演,并与MODIS植被产品结合生产了第1个全球植被高度产品——IVP(ICESat vegetation product)。PANG等[14]基于GLAS数据生成全球植被高度产品,提出了使用机载激光雷达高密度点云数据的验证方法,在美国西海岸的几个常绿针叶林试验区证实GLAS的树高反演精度较高;随后,在中国云南及甘肃试验区又进一步提出了使用低密度机载激光雷达数据进行GLAS反演模型训练和检验的算法[15]。PANG等[16]在中国西南林区发现不同观测周期GLAS波形长度与机载激光雷达反演的树高的相关性不同,夏季的较高。这些发现暗示了不同物候可能对森林参数估计的影响。PANG等[17]注意到了这种现象会影响温带森林树高的反演,并通过比较近似重复观测的波形数据证实了中国东北落叶林在落叶期冠层反射明显比夏季生长季低,进一步开展的树高反演也说明夏季GLAS数据的树高反演精度较高,其他观测周期的精度较低。邢艳秋等[18]在中国长白山地区研究了不同坡度等级下森林高度的反演能力。
BOUDREAU等[19]使用GLAS数据和机载剖面激光雷达扫描线数据对加拿大魁北克的森林进行了生物量估计。BACCINI等[20]使用GLAS数据和MODIS数据对非洲热带地区进行了森林生物量制图。SAATCHI等[21]将GLAS数据与MODIS,QuikSCAT等数据相结合,对全球热带国家和地区进行了森林生物量估测,并给出了生物量反演的不确定性分析图。SIMARD等[22]将1个观测周期的GLAS反演的树高与MODIS、TRMM、降雨等数据结合,建立了1个统一的反演模型,从而得到每个像元尺度上树高的估计。
TANG等[23]基于生物物理方法对GLAS波形作递归分析,改进了由激光雷达计算的LAI(leaf area index)和垂直叶剖面(VFP),并在美国加州成功运用,进而将方法推广至全美本土。王成等[24]计算了GLAS波形数据激光穿透指数(LPI),基于LPI反演了LAI并通过机器学习与Landsat TM数据融合对区域LAI进行反演,结果表明该方法适用性较好。
美国曾规划了3波束激光雷达与合成孔径雷达结合的DESDynI卫星计划,后来该卫星计划搁置,但其激光雷达部分演变为8波束的激光雷达载荷。搭载在ISS平台上的GEDI全波形激光雷达,于2018年12月成功发射。GEDI是第1个多波束同时工作的对地观测激光雷达,能提供位于南北纬51.6°之间(ISS地面轨道覆盖的区域)的森林观测数据,将开展森林高度、地上生物量、生物多样性等方面的观测[25]。日本也在规划基于ISS平台的MOLI系统[26],MOLI采用双临近波束的观测模式,并同时提供3通道的光学成像观测。需要指出的是,GEDI和MOLI都是基于ISS平台的运行性观测计划,标志着ISS平台从航天载荷实验平台过渡到运行性观测平台。欧洲也论证过Carbon-3D,LEAF等激光雷达为主载荷的卫星概念,但没有最终立项[27]。
近年来,国内多家单位也开始进行星载激光雷达的研究,我国计划发射的陆地生态系统碳监测卫星及高分七号卫星[28],均计划搭载全波形激光雷达系统,其中陆地生态系统碳监测卫星计划搭载3波束的激光雷达和多角度光学相机,从而实现大范围内连续的森林高度和碳储量估测。
2 光子计数激光雷达
2.1 简介
微脉冲光子计数技术采用更加灵敏的探测手段,能实现单光子级别的探测。仪器发射脉冲的展宽小且发射频率高,能充分利用光子信息获取更高密度、更真实的数据,并可延长激光器寿命[29]。全波形激光雷达与光子计数激光雷达的林木信号对比如图2所示[30]。全波形信号可分辨来自植被冠层、下木、地面的回波信号。使用光子计数激光雷达则意味着植被散射单元多的区域内光子被记录的概率更高。光子计数激光雷达和离散回波激光雷达的数据外观具有很高的相似性,大量光子记录外观类似点云数据[30-31]。
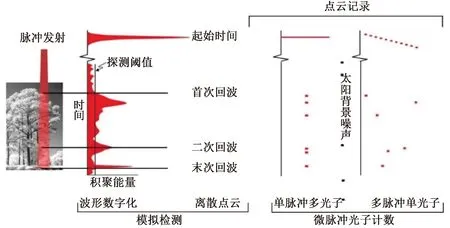
图2 全波形激光雷达与光子计数激光雷达的林木信号对比Fig.2 Comparison of full waveform lidar and photon counting lidar for forest signals
2.2 技术进展及在林业中的应用
光子计数激光雷达森林参数反演的出发点来自林区的光子点云数据,如图3所示。通常需要进行光子点云数据的噪声滤波、地面光子识别、植被光子识别及植被光子指数计算。基于光子指数建立森林参数的反演模型,进行参数估计,也可以将一定范围内的光子合成为波形数据,借用波形激光雷达的参数反演方法进行参数估计。
NASA于2018年9月成功发射了光子计数激光雷达载荷的ICESat-2卫星。ICESat-2采用非太阳同步轨道,飞行高度约500 km,可以观测南北纬88°范围内的地球表面,重复周期为91 d。其搭载的ATLAS激光器在532 nm(绿)波段发射并接收激光信号,共发射6束能量不一的激光束,沿轨方向分3组平行排列,组间地面距离约3.3 km,光斑直径约16 m。高达10 kHz的重复频率可以得到约70 cm的沿轨采样间隔,具体的激光配置如图4所示。
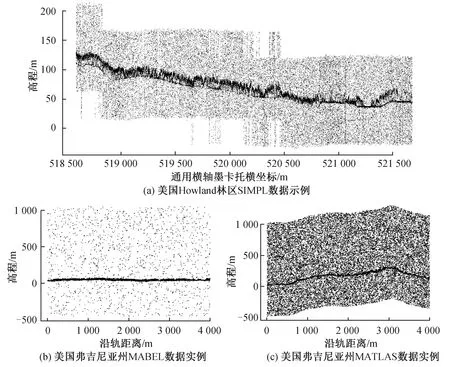
图3 3种不同光子计数激光雷达数据实例Fig.3 Data examples of three different photon counting lidar
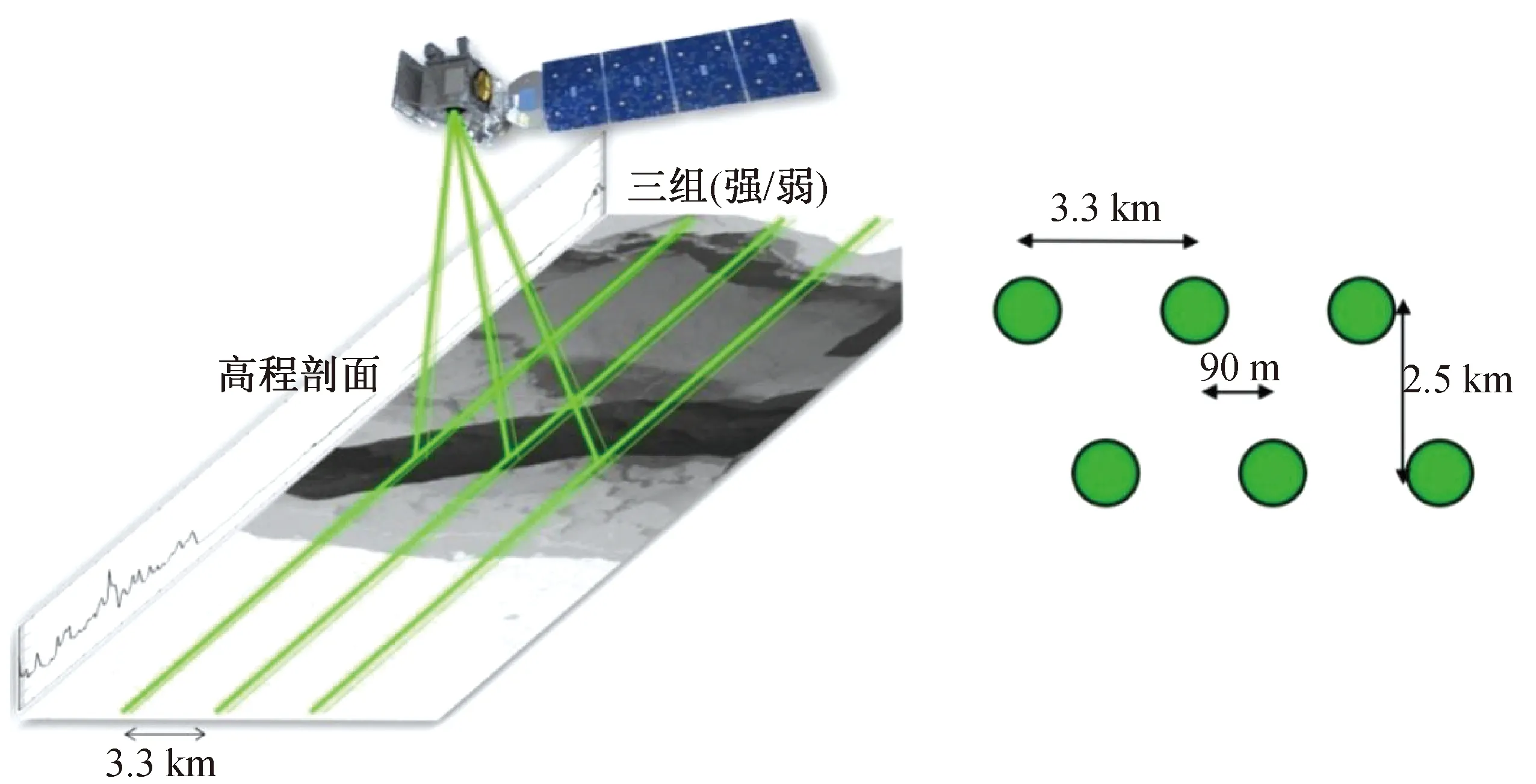
图4 ICESat-2卫星ATLAS激光器示意图Fig.4 ATLAS configuration onbroad ICESat-2
为了对卫星上天后的数据质量和工作性能进行前期试验和测试,NASA设计了机载模拟器对典型研究区进行机载飞行实验。其中比较典型的机载数据包括SIMPL(slope imaging multi-polarization photon-counting lidar)数据和MABEL(multiple altimeter beam experimental lidar)数据。另外基于MABEL数据模拟产生了MATLAS(mabel simulated atlas)数据,以更好地表征不同地形和地物条件下光子计数激光雷达的数据情况。
图3为以上3种数据在不同林区的情况,分别是美国Howland林区SIMPL数据、美国弗吉尼亚州MABEL数据和美国弗吉尼亚州MATLAS数据。从图中可看出,数据记录沿飞行地面轨迹呈窄带状分布,属于高程剖面点云[32-33]。
目前,针对剖面光子点云的去噪和滤波算法研究并不成熟。AWADALLAH等[34]将主动轮廓模型引入栅格化的点云影像中,算法通过对栅格影像进行整体和局部像元信息的分析迭代,泛函分析使曲线能量最小化。结果表明:该方法能较好地包络出包含植被和地形的信息点,但栅格化过程会损失部分点云信息。HERZFELD等[35]提出了一种基于频数直方图分析的算法,该方法在美国SERC林区对光子点云数据进行高噪声模拟,然后从模拟数据中分离地面点、植被点和噪声点。ZHANG等[36]提出了一种基于改进椭圆搜索形状的DBSCAN密度聚类算法,对于MABEL数据和不同地形下的模拟数据取得了较好的结果。GWENZI等[37]针对稀疏植被地区采用了一种基于点云高程统计的密度切割方法。CHEN等[38]提出了一种基于椭圆局部离群因子的光子计数激光雷达林区信号提取自动算法,并能应用于强噪声复杂地形条件。
由于目前尚缺乏森林目标的星载光子计数激光雷达数据源,有关森林参数反演的相关研究工作主要针对NASA发布的ICESat-2原型机机载实验数据进行。MONTESANO等[39]利用FLIGHT模型对SIMPL数据进行模拟,并根据模拟的场景详细探究了光子计数激光雷达数据在针叶林生物量估测方面的应用及不确定性的度量,50 m(长度)尺度为光子计数激光雷达模型拟合的最佳水平分辨率,此时生物量间隔单位为20 mg/hm2,估测误差为20%~50%(95%置信区间)。GWENZI等[37]利用机载实验数据探究了光子计数激光雷达应用于稀树草原生态系统的潜力,结果表明:得出的高度指标与离散型激光雷达计算得到的高度具有较好的相关性。GLENN等[40]分析了结合Landsat 8卫星光学数据和ICESat-2原型机机载实验数据协同反演树高的潜力,参考传统小光斑激光雷达数据点云特征构造了适合于光子点云的特征变量并用于建模反演,初步展现了光子计数激光雷达在参数反演方面的潜力。
3 成像激光雷达
随着激光探测器件的发展,具有一定面阵观测能力的星载成像激光雷达也显示出林业应用潜力。面阵激光雷达突破了单点探测、扫面成像的限制,为获取高分辨率连续覆盖的植被三维信息提供了一种全新的技术手段。
2007年发布的《美国国家地球科学十年规划》中提出了全球地形和植被三维测量的LIST(lidar surface topography)卫星计划,计划使用成像激光雷达技术实现全球5 m空间分辨率的地形和植被三维结构观测,其中激光器的指标是1 000束的激光器件,实现地面5 m(直径)光斑大小的分辨率,并陆续开展了一些机载样机研制[41-42]。KRAINAK等[41]采用Geiger模式的雪崩光电二极管测距单点模块构建雪崩光电二极管测距阵列的方式,实现了4×4阵列单元的探测器研制。RAMOND等[42]采用电子可调谐的面阵激光器(ESFL)方式,实现了128×128阵列单元的探测器研制,且每个单元都可接收全波形的激光雷达数据。DUONG等[43]用ESFL系统进行了机载飞行实验,研究结果表明:ESFL的全波形成像观测数据在地形探测和植被参数估计方面与机载小光斑激光雷达的探测能力具有较好的一致性。
张秀达等[44]研制了基于高速增益-距离映射原理的双通道面阵成像系统,2个通道经过像素级匹配后,能以较快的速度对选通距离内的目标物体同时成像,并利用距离-时间、增益-时间的映射关系实现场景内的距离细分。李丹[45]用该系统在我国青岛进行了森林郁闭度反演实验,结果表明:郁闭度的估测精度为70.22%。周国清等[46]研制了基于光纤耦合的5×5阵列单元雪崩光电二极管成像激光雷达系统。
由于激光器能量和发射频率的综合限制,目前成像模式的星载激光雷达仍然处于原理样机研究阶段,尚无确定的卫星计划。
4 结束语
综合国内外森林探测激光雷达系统的发展可以看到,全波形激光雷达应用于森林探测的技术较为成熟,未来面向植被探测的星载全波形激光雷达载荷发展趋势会由单波束探测逐渐过渡到多波束探测,考虑到空间覆盖的观测能力,将逐步加大一定范围内空间侧摆的能力,实现卫星寿命期内尽可能密集的空间光斑采样。目前星载光子计数激光雷达在森林参数方面的反演和预测尚处于研究探索阶段,如何从强背景噪声中提取信号点,以及如何利用辐射传输模型对信号进行模拟仿真等,需要从机理层面理解噪声产生的形态及分布规律,有待深入研究。随着ICESat-2 ATLAS数据的发布,光子计数激光雷达有望得到较快的发展。成像激光雷达是一种获取大范围连续森林垂直参数的有效手段,但距离卫星发射仍有较远的距离。未来一段时间内,激光雷达(全波形或光子计数)数据提供的大范围离散观测数据,仍然需要与其他成像遥感数据(光学或微波)协同实现空间连续覆盖的森林观测。
作为有源、主动的遥感技术,星载激光雷达载荷对稳定性、器件寿命要求很高。在其发展过程中,国际上的载人航天平台发挥了很大作用(美国航天飞机的SLA-1/2,近几年国际空间站平台的GEDI和MOLI),建议我国也充分发挥空间站平台的优势,建设更加灵活、可靠的星载激光雷达森林探测系统。国外已发射的星载激光雷达多为单一载荷,这样可以在波束数量、备份激光器方面有更大的余量,观测时段也更加灵活,而且夜晚观测往往能提供信噪比更高的激光回波数据。随着我国卫星姿控能力的提升,也可有选择地借鉴这种模式,以获取更多高质量的激光雷达观测数据。
猜你喜欢
农业工程学报(2022年4期)2022-04-24
汽车观察(2021年8期)2021-09-01
计算机与网络(2020年19期)2020-12-04
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
发明与创新·大科技(2019年11期)2019-03-07
汽车电器(2017年1期)2017-12-06
百科知识(2017年3期)2017-03-17