利用高轨预警卫星提升远程预警雷达预警能力研究
2019-07-05 05:24:20张雅声周海俊汉京滨
兵器装备工程学报 2019年5期
周 童,张雅声,周海俊,汉京滨
(1.航天工程大学 研究生院, 北京 101400; 2.航天工程大学, 北京 101400)
随着军事高科技的发展,弹道导弹攻防能力成为了衡量一个国家国防水平高低的重要因素。在导弹早期预警过程中,高轨预警卫星和远程预警相控阵雷达协同完成探测任务[1-2]。对于洲际弹道导弹这种射程较远的导弹来说,雷达难以布设在导弹发射点附近,即雷达波束难以探测到导弹飞行全过程,如图1所示。若无先验信息的指示,雷达只能在重点区域设置一道较大的搜索屏,但这种探测模式工作效率低下,严重浪费了雷达资源,因此如何利用高轨预警卫星产生的预警信息,并将预警信息转化为雷达工作所需的引导信息,进而提升相控阵雷达的工作效果具有重要的现实意义[3-4]。
图1 雷达、导弹相对位置示意图
文献[5]采用了一种地平线搜索策略,并提出了一种波位编排方法以尽早截获目标。文献[6]中雷达利用分区搜索的方法以提高导弹的截获概率。文献[7-9]研究了相控阵雷达工作过程中的波位编排和搜索策略问题,但以上学者是在无先验预警信息下开展的研究。在有预警信息的条件下,文献[10]研究了低轨预警卫星和精密跟踪雷达的交接过程,并提升出了一种搜索半径优化方法。文献[11]在有预警卫星的情况下提出了一种相控阵雷达工作模式。文献[12]分析了预警信息对雷达工作性能的提升。文献[13]初步建立了卫星的引导和精密跟踪雷达搜索空域大小的关系。本文在上述研究的基础上,针对高轨预警卫星对远程预警雷达预警能力的提升问题,研究了高轨预警卫星生成预警信息,预警信息转化为雷达工作所需的引导信息,以及引导信息对雷达工作效能指标的提升三个过程,文章研究内容为提高雷达工作效率、提升雷达预警能力提供了依据。
1 基于协方差分析描述函数的弹道误差传播
由于高轨预警卫星所处轨道位置较高且星上传感器精度有限,在对导弹关机点状态进行估计时,难以计算出精确的导弹关机点战术参数,且误差较大。远程预警雷达由于地理位置约束在预警卫星完成观测后并不能及时捕获导弹目标,此时需要对预警卫星观测得到的关机点状态进行误差传播分析,生成预警信息。
在弹道预报及误差传播方面,目前主要有两种方法:解析几何法和数值积分法[14]。本文利用协方差分析描述函数法(CADET)对导弹关机点状态进行预推,利用弹道误差传播结果生成高轨预警卫星的预警信息[15]。

(1)

式(1)为时变的非线性微分方程,无法获得解析解,通常采用数值积分的方法获得其数值解。数值积分的过程可以描述为:已知目标在k-1时刻的状态xk-1,那么可以通过积分获得目标在下一时刻k的运动状态xk,数学表达式如下:
(2)
(3)
式(3)中,m为位置矢量r的均值。因此拟线性系统的动态矩阵描述函数N可以表示为:
(4)

由上式推导得到导弹六维状态变量和协方差矩阵的传播过程:
(5)
利用协方差分析描述函数法,对导弹关机点状态进行误差传播分析,得到了高轨预警卫星产生的预警信息,从而为后续远程预警雷达的工作提供指引。
2 预警信息与引导信息的转换
远程预警相控阵雷达在战备值班时通常需要预警指挥中心对其提供工作所需的引导信息,而通过弹道误差传播结果获得的导弹预警信息是在地心惯性坐标系下表示的,若要指引雷达工作,需将预警信息转换至雷达指向坐标系,本节将根据这个思路,建立由地心惯性坐标系向雷达指向坐标系的转换流程,最终将地心惯性坐标系下的导弹运动协方差矩阵转换至雷达指向坐标系,并依据转换而来的协方差矩阵生成雷达工作所需的引导信息。
2.1 坐标系及其转换关系
2.1.1地心惯性坐标系到地心固定坐标系的转换
地心惯性坐标系O-xeiyeizei与地心固定坐标系O-xefyefzef的原点都为地心,地心惯性坐标系的X轴在赤道平面指向平春分点,地心固定坐标系的X轴在赤道平面指向格林尼治本初子午线,两坐标系Z轴都垂直赤道平面指向北极,Y轴根据右手定则确定。地固系为一动系随地球旋转,地惯系则相对不动,二者的转换矩阵由两坐标系X轴的夹角Ωg确定,由此可得两坐标系转换矩阵Mg=Rz(Ωg)。
(6)
由此可得两坐标系下速度转换关系为:
(7)
式(7)中,w为地球自转角速度。
2.1.2地心固定坐标系到雷达直角坐标系的转换
雷达直角坐标系的原点在雷达阵面中心,X轴在当地水平面指向正北,Z轴在水平面指向正东,Y轴指向天顶方向。由地固系O-xefyefzef到雷达直角坐标系O-xryrzr的转换矩阵为:
(8)
由此可得两坐标系下速度转换关系为:
(9)
式(8)、(9)中,(xro,yro,zro)为雷达原点在地心固定坐标系下的坐标;(λR,φR)为雷达原点在地球表面的经度和纬度;RY(-π/2)、RX(φR)和RZ(λR-π/2)分别表示绕Y轴旋转-π/2、绕X轴旋转φR和绕Z轴旋转λR-π/2的旋转矩阵。
2.1.3雷达直角坐标系到雷达指向坐标系
雷达波位编排一般在雷达指向坐标系(xs,ys,zs)下进行,以雷达直角坐标系为基础,雷达指向坐标系的X轴指向目标。目标在雷达直角坐标系下的方位角为φ,俯仰角为θ。先将雷达直角坐标系绕Z轴旋转方位角φ,之后绕Y轴旋转-θ,即可得到雷达指向坐标系,如图2所示。
图2 雷达指向坐标系
转换矩阵可以表示为:
(10)
由此可得速度转换关系为:
(11)
2.2 引导信息提取
假设地心惯性坐标系下的协方差矩阵为Cov(Cei),根据以上推导,可以得到雷达指向坐标系下的导弹运动状态协方差矩阵Cov(Cs),二者的转换关系可以表示为:
(12)
其中Jt为整个转换过程中的总转换矩阵:
Jt=MsMpMg
(13)

对远程预警雷达来说,除了搜索区域大小,其工作还离不开搜索区域的俯仰角和方位角信息,在进行坐标系转换时,雷达直角坐标系旋转过程中所采用的方位角和俯仰角就是雷达设屏所需的角度信息。至此,就完成了将高轨预警卫星产生的预警信息向指挥雷达工作所需的引导信息的转换。
3 雷达搜索截获过程建模
远程预警相控阵雷达在日常战备值班时若没有预警中心提供的引导信息,通常在远端建立一道120°的搜索屏,这么设置的原理是尽可能捕获到该方向所有可能出现的导弹目标,如图3所示。但若有引导信息存在,雷达如果继续维持大搜索屏进行目标捕获,不仅浪费雷达资源,而且还会降低雷达工作效能,本节通过研究相控阵雷达在扫描过程中的工作原理,分析了雷达在小屏搜索模式下的工作过程,并从理论分析上证明了该方法的优越性。
图3 雷达波束搜索原理示意图
3.1 雷达搜索距离模型
经典的单脉冲雷达方程可以表示为:
(14)
式(14)中,Pt为雷达峰值辐射功率;Gt为发射天线增益;λ为雷达波长;σ为目标雷达散射截面积(RCS);k为波尔兹曼常数为1.38×10-23(J/K);T0为噪声温度;Bn为接收机噪声带宽;Fn为系统噪声系数;L为总的损耗系数;(S/N)min为最小可检测信噪比。
利用Et=Ptτ将雷达方程改写为能量形式:
(15)

(16)
由此可见相参累积数量M对雷达有效作用距离有着重要的影响。
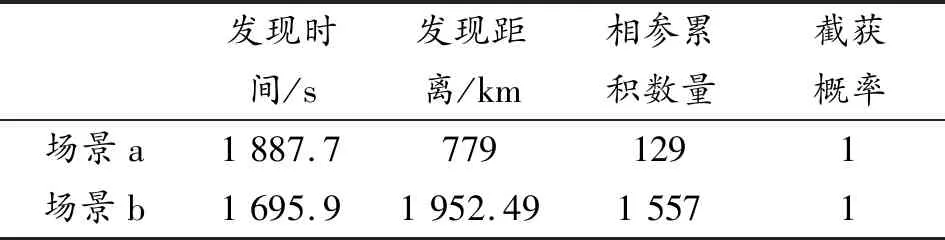
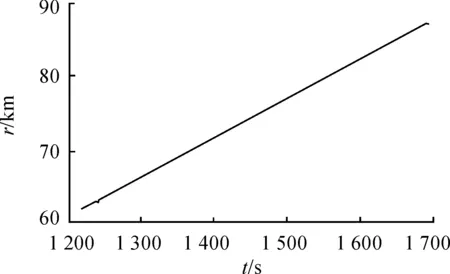
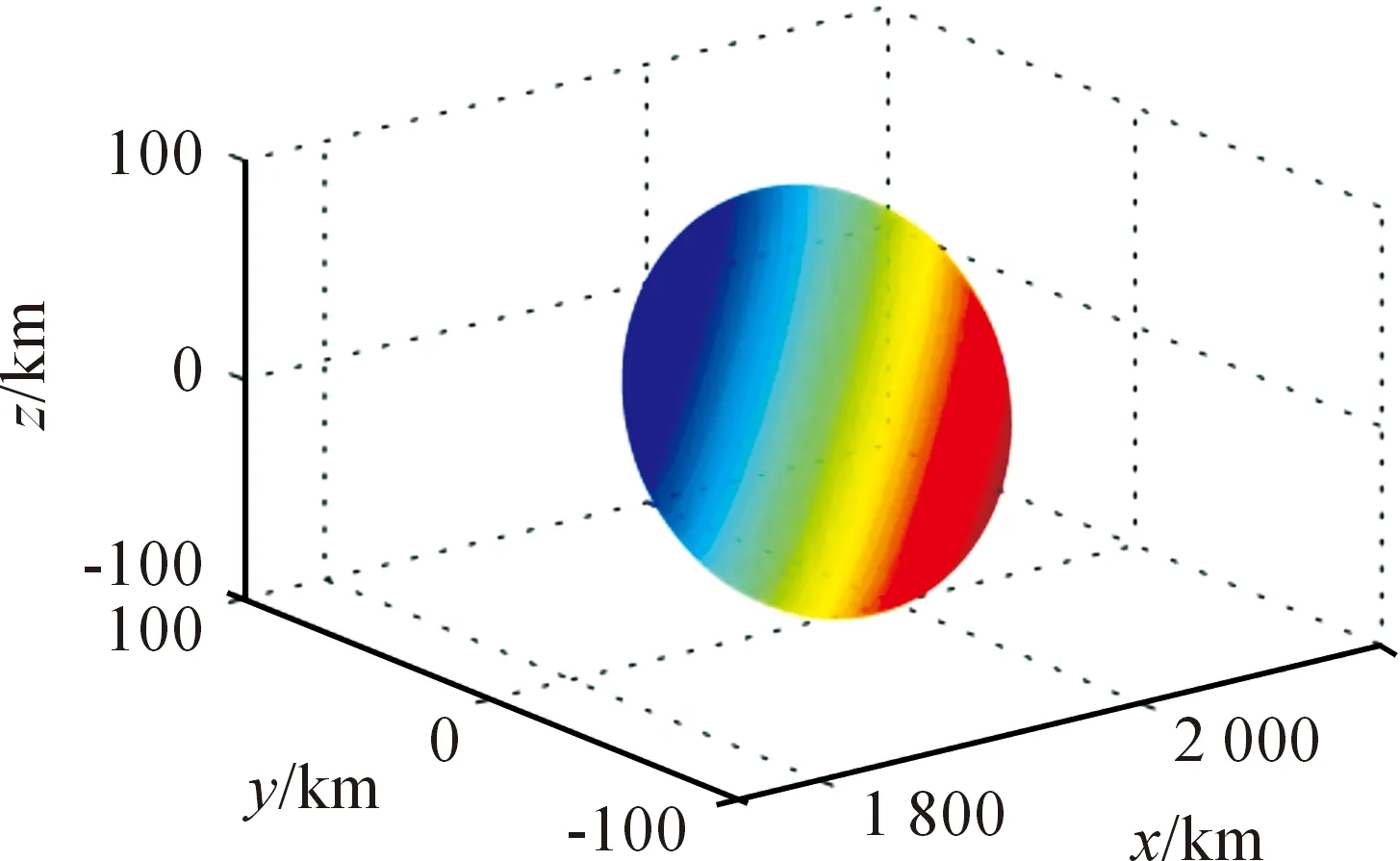
在无引导信息的条件下,对于预警雷达的扫描工作方式而言,雷达完成对搜索区域的搜索时间是Ts1,期间导弹穿越雷达波束范围的时间是tp,为确保不遗漏目标,应满足Ts1 (17) 每个位置波束的驻留时间可以通过PRT·Mp=Ts1/(Ap/a)计算得到,结合Ts1=tp=R0·a/vp,可以得到雷达在一个位置的脉冲数量为: (18) 式(18)中,R0为无引导条件下雷达的单脉冲搜索距离;PRT为单个波束驻留时间;Ap为雷达方位角范围,在无引导条件下通常设为120°;vp为导弹穿屏时垂直于雷达波束阵面的速度。 在有引导信息的条件下,雷达不必再设大屏来进行大范围警戒,可依据引导信息的指示缩小搜索屏范围从而节省雷达资源,提升雷达工作效果。类比无引导信息下的搜索过程,设雷达在有引导信息时完成对搜索区域的搜索时间是Ts2,期间导弹穿越雷达波束范围的时间是tw,为确保不遗漏目标,应满足Ts2 (19) 每个位置波束的驻留时间同样可以通过PRT·Mw=Ts2/(Aw/a)计算得到,得到雷达在一个位置的脉冲数量为: (20) PRT和vw与无引导条件下含义相同,但R和Aw则与无引导时含义不同,此时R和Aw不再是一个定值,而是一个与引导信息相关的变量,由引导信息中误差半径的大小决定。如下式所示: Aw=2·arctan(3r/R) (21) 式(21)中,r为雷达指向坐标系下确定的雷达搜索半径。因此式(20)可以改写为: (22) 导弹防御是一个动态过程,目标与雷达的距离时刻变化,同时引导信息中误差半径大小也在时刻变化,因此相参累积数量也不是一个定值,即雷达的有效探测距离也随时间变化,为了及时对导弹目标进行捕获需要实时更新预警引导信息。本文采用以下方法进行预推以保证及时发现导弹目标。 ① 从t时刻开始预推,设此时雷达可探测距离等于目标与雷达距离R=D,其中D可由雷达指向坐标系下导弹的位置得到,根据雷达波束距离R和式(22)可以求得当前时刻雷达相参累积数量M。 ② 利用当前时刻的相参累积数量M,可根据式(16)求得相参累积后雷达的作用距离Rr。若Rr 将求得的不同Mp和Mw带入到雷达方程,对比得到有引导条件下雷达工作效果的提升效果。 雷达对目标的单次截获概率可以表示为目标的发现概率和落入概率的乘积,即: Pj=Pl·Pf (23) 式(23)中,Pl为落入概率;Pf为发现概率。 由于将搜索半径进行了放大,落入概率可近似为1。在实际的捕获过程中,雷达波束会对目标多次探测,通过多次截获累积的概率为: P=1-(1-Pj)M (24) 式(24)中,Pj为单次截获概率;P为最终截获概率;M为相参累积数量。 有引导条件下雷达对目标的照射脉冲数要高于无引导信息的情况,因此可以提高目标的截获概率。 为验证本文算法模型,建立仿真场景,以某型洲际弹道导弹为基础开展算法验证,仿真参数设置如下: 1) 导弹发射时间为2018年6月1日11时57分00秒,发射点位置为(40°N,127°E),落点位置为(42°N,-120°E),导弹关机点时间为246s,飞行时间为1981.6s。 2) 某型远程预警相控阵雷达位置为(38°N,-118°E)。雷达工作参数参照美军AN/TPY-2雷达,对于RCS为0.1 m2的弹头目标雷达单脉冲探测距离R0为779 km,波束张角为120°,雷达波束宽度为0.5°,单波束驻留时间为1 ms。雷达采用非相参累积模式工作,目标单次检测概率为0.8。 3) 高轨预警卫星探测得到导弹关机点的状态均值m0和协方差p0分别为m0=[-2 977 385.92 m -3 805 908.26 m4 777 372.27 m 4 062.94 m/s -1 720.15 m/s 4 748.21 m/s], 为了对比分析引导信息对雷达工作效果的提升,分别建立以下仿真场景: a) 无引导信息,雷达采用单脉冲固定搜索距离和波束张角进行探测。 b) 有引导信息,雷达根据引导信息实时计算目标误差半径和相参累积数量,更新搜索屏张角大小和相参累积后的雷达作用距离。 由于地球曲率和雷达位置影响,导弹关机后一段时间并不在雷达视线平面内,经过计算将初始预推时间取为12时17分18秒。即t0=1 218 s,仿真步长Δt=0.1 s。经过场景仿真,结果如表1所示。 表1 场景仿真结果 在场景b中,由于预警引导信息的存在,雷达在事先预知导弹位置的情况下缩小了搜索空域,获得了更高的相参累积数量,雷达探测距离大幅度增加。同时注意到场景a中雷达也存在一定的相参累积,但雷达工作时无引导信息,并不能提前预知目标位置,把搜索屏设在远端,不能有效地利用相参累积的能量提高雷达工作效果;对于雷达截获概率来说,两种情况下雷达相参累积数量都较高,雷达均能获得较好的截获效果。 在场景b里的截获过程中,雷达在1 695.9 s时发现目标,在此时间段内雷达搜索区域半径变化情况如图4所示。 图4 雷达搜索区域半径 t=1 695.9 s时由CADET弹道误差传播方法获得的导弹预警信息在地心惯性坐标系下可以表示为相应的位置误差椭球,如图5所示。 图5 地心惯性坐标系预警信息误差椭球 根据文中第2节内容,将地心惯性坐标系下的预警信息转换为雷达指向坐标系下的引导信息,引导信息误差椭球如图6所示。 图6 雷达指向坐标系引导信息误差椭球 雷达在指向坐标系中依据引导信息指引对目标进行搜索与捕获,在仿真过程中是一个动态的过程,将雷达与目标距离D,场景a、b中雷达的有效作用距离绘制在同一幅图中,如图7所示。 图7 雷达的有效作用距离示意图 导弹由远及近与雷达距离逐渐缩小如图7中的曲线D所示;场景a中雷达作用距离为雷达在单脉冲条件下的作用距离,为一定值;场景b中雷达作用距离随雷达相参累积数量改变发生变化,略微降低,原因是随着弹道预报的进行,导弹误差管道呈扩散趋势,雷达搜索范围增加。由图7中曲线交汇情况可知,场景b中雷达由于相参累积,探测距离提升明显,将会及早发现导弹目标,为后续预警拦截提供充足的时间。 在有预警引导信息存在的条件下雷达采用的小搜索屏工作模式将有效提高雷达探测距离,提升预警系统的预警处置时间,文章研究内容对于我国反导系统的建设具有一定的应用价值。3.2 雷达截获概率模型
4 仿真分析


5 结论
猜你喜欢
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28 06:19:00通信技术(2019年3期)2019-05-31 03:19:08中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28电子测试(2018年6期)2018-05-09 07:31:54数学大世界(2018年1期)2018-04-12 05:39:03传媒评论(2017年8期)2017-11-08 01:47:36声学与电子工程(2017年1期)2017-06-22 11:30:09中等数学(2017年2期)2017-06-01 12:21:50四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:20中国海洋大学学报(自然科学版)(2014年8期)2014-02-28 12:21:31