激励性和惩罚性交通拥堵治理政策的比较
——基于动态演化博弈模型及仿真分析
2019-07-02 02:31:26李祯琪欧国立
中国管理科学 2019年6期
李祯琪,欧国立
(北京交通大学经济管理学院,北京 100044)
1 引言
城市交通是城市社会经济发展的驱动力。然而,由于城市的快速发展和汽车使用量的增加,道路交通拥堵已经成为世界上许多城市面临的一个常见问题。严重的交通拥堵给城市发展带来了巨大的经济和环境成本,各城市管理者均基于不同的治理思路提出并实施了多项治理政策。城市交通管理者及研究人员对不同的治堵措施,如扩大道路通行能力、鼓励公共交通、限制车辆使用等进行了分析,并根据当地的实际情况将这些拥堵治理政策应用到现实。但到目前为止,大多数城市的交通拥堵问题并没有得到有效的解决,往往是在实施政策的早期阶段,道路交通拥堵得到明显缓解,但是随着时间的推移,拥堵的情况会再次加重,出现反弹的现象。
交通拥堵问题一直是城市问题研究者们的关注焦点。已有的关于交通拥堵的研究主要集中在以下两个方面:第一是交通拥堵形成的原因,例如,张钟允和李春利[1]利用经济学中边际分析方法剖析交通拥堵问题的形成,并分析了拥堵费制度缓解道路拥堵的内在机理。徐曌和欧国立[2]根据外部性理论、时间价值理论和交易成本理论建立理论模型,对交通拥堵的原因、发展过程进行了理论分析。刘有军和田聪[3]研究了路网形态对城市交通拥堵的影响。第二是交通拥堵治理政策提议,例如,赵鹏军和万海荣[4]指出从宏观空间结构和微观街区设计等方面优化土地利用和交通关系,采用行政和经济等多手段加强小汽车使用管理,完善公交网络服务、积极落实公交都市战略等。李昆达等[5]分析中国快速城镇化背景下公共交通优先发展的必要性,探讨了支撑优先发展公共交通的公共政策体系架构,并从城市发展、公共交通、交通需求管理、科技创新四个方面提出了政策要点建议。Grant-Muller和Xu Meng[6]将治理道路交通拥堵的措施划分为五大类:1)基础设施(如扩建旧道路基础设施,建造新道路基础设施);2)公共交通,指那些公共交通优先权、公共交通票价优惠和补贴等提高公共交通吸引力的措施;3)对车辆使用进行限制(例如专用车道,行人区,限制进入的区域);4)技术工具,如信息和通信技术,智能交通系统;5)经济手段,指通过经济性措施对车辆所有权、停车权等进行干预,还包括车辆购置或使用税,尾气排放税,道路拥堵收费等。
除了上面的两个主要方面,也有部分学者针对交通拥堵治理政策的效果进行了研究,但是这些研究几乎都是选取典型城市作为案例,定性地分析治理政策实施后城市交通拥堵状况的变化。例如, Goh[7]介绍了新加坡采取先进的电子道路收费手段(ERP)来控制道路车辆,治理交通拥堵的政策,并对该政策实施前后道路拥堵情况进行了说明。Ieromonachou等[8]及Andersson和Nässén[9]分别研究了道路收费政策在英国,意大利和哥德堡等国家的应用情况和效果。仅有少数学者通过数据模型量化分析了交通拥堵治理政策的效果,例如,Liu Zhiyong等[10]采用了RD方法(regression-discontinuity-design),对比分析了廊坊市采用的两种不同限行政策ODPW(One-Day-Per-Week)和OAE(Odd-And-Even),在出行量、出行强度、违章率以及行驶速度等方面的作用效果,研究发现OAE替代ODPW之后,私家车出行量有所减少,但由于平均违章率从8.12%提高到17.90%,合法车辆的出行强度提高了12%,所以减少量并没有达到预期水平。另外,实施OAE后,86%的路段行驶速度得到了改善,在早高峰、晚高峰和非高峰时间分别实现了23.30%、12.85%和8.21%的行驶速度改进。Jia Ning等[11]以天津市限行政策目标区域内的私家车出行者为调查对象,利用问卷调查数据,研究并发现了政策实施后,出行者对该政策的态度与出行行为的变化二者之间密切相关。
通过对已有文献的回顾,发现关于交通拥堵治理政策实施效果的研究,以及对不同治理政策效果对比的研究并不充分,在研究内容和研究方法上都存在较大的留白。基于此,本文利用演化博弈模型对不同类型交通拥堵治理政策(激励性和惩罚性)的实施效果进行分析。演化博弈理论(Evolutionary Game Theory,EGT)不需要玩家具备完全行为理性的条件,可以被看作是将博弈论和动态演化过程相结合的一种分析方法[12]。演化博弈理论的这些优势决定了它具有很广泛的应用空间。例如,许民利等[13]建立了供应商与制造商食品质量投入的演化博弈模型,分析上下游企业策略的选择对质量控制的影响,研究了政府调控措施对演化稳定策略以及食品安全的影响。高明等[14]利用演化博弈模型对环境污染群体性事件进行了研究,考虑到了环境污染群体性事件的复杂性和影响的长远性特点,提出了能够从根本上解决环境污染事件的可行方案。
有部分学者将演化博弈模型应用在了交通运输研究领域,但这些研究主要目的是优化道路设施和交通信号[15-17]。肖海燕[18]对政府(治理或不治理)与出行者(私人交通或公共交通)之间的博弈进行了分析,但本文中的模型设定不同于肖海燕的研究,本文将出行者分为不同类别(私家车偏好者和公共交通偏好者),探讨了不同交通拥堵治理政策(激励性和惩罚性)下出行者交通选择行为的演化博弈,并进行了仿真分析。研究揭示了不同治理措施对城市交通拥堵问题施加影响的过程,对这些影响的结果做出了解释,并证实了政府政策的必要性。研究结果表明,政府管理者可以通过政策引导出行者采取“合作”的策略。此外,尽管补贴性和惩罚性政策在缓解交通拥堵问题上都是有效的,但相比激励性治理措施,惩罚性措施的治理效果更具有迅速性和持久性。
2 基于博弈的出行选择与交通拥堵的形成
在著名的“囚徒困境”中,每个囚犯最终都会选择“忏悔”策略,实现“纳什均衡”,即非合作均衡。即使同时选择合作“无罪抗辩”会使每个参与者的效用都得到改善,合作也很难建立,因为选择合作战略的人冒着巨大的损失风险。“纳什均衡”并不一定是双方利益最大化的结果,这就是个人理性与集体理性的冲突。亚当·斯密的“利己主义”认为追求个人利益的过程有助于社会利益的有效提升,但非合作博弈理论对此提出了挑战。在非合作博弈中,结论正好相反。新古典经济学的基本假设是“理性人”,然而现实情况是,在许多情况下,人类行为或选择可能是非理性的,因为信息是不完整的。由于约束(如信息等),个体选择在表面上是理性的,但实际上从集体理性的角度来看是非理性的;生活中的这种困境的例子包括资源枯竭、选民投票率低和人口过剩等。
交通拥堵的形成类似于“囚徒困境”的情境。人们基于个人利益的最大化最终决定采用哪一种交通出行方式,每天有大量的人使用城市交通系统,个人的理性选择可能会造成集体的不合理和拥挤[19]。从下面简单的博弈模型,我们可以更好地理解城市交通拥堵的形成。
在该博弈模型中,假设每个城市都是孤立的,没有人/车与外界交换。城市人口为n,gi为第i个人拥有的小汽车数量,城市中小汽车总数为G,G=∑gi,个人拥有一辆车的满意度与小汽车总数有关,用效用函数U(G)来表示。道路是一种准公共物品,当运输量超过一定数量限制时,道路才会出现拥堵并表现出排他性特征,因此城市交通资源的稀缺性是由G0来决定的,当G
第i个人选择购买gi辆小汽车时,其他人购买量为g-i,g-i=g1+g2+…+gi-1+gi+1+…+gn-1+gn,并且g-i+gi=G。第i个人从购买gi辆小汽车中得到的效用Ui满足:
Ui=gi·U(g-i+gi)
(1)

(2)
(3)

当i=1,…,i-1,i+1,…,n,同理可得到:
…
…
将这些公式相加并除以n,则:
(4)

G**·U(G**)=max0≤G≤∞G·U(G)
(5)
U(G**)+G**·U′(G**)=0
(6)
比较(4)式和(6)式,我们可以确定G*>G**,说明当每个人只考虑自己的利益,而不考虑他人的利益,城市道路资源将被过度使用,出现交通拥堵问题。城市交通问题被看作是一个典型的非合作多人博弈,在这个过程中,每个人的选择在表面上都是理性的,但从整个社会的角度来看是不合理的。无限重复博弈中的合作可能产生最多的集体收益(系统最优解)[20]。但是,由于交通拥堵是广大社会群体的博弈结果,这种合作不可能简单地通过重复来实现,而外部强制执行机制的加入可能更有效地帮助实现系统最优解。因此,在解决交通多度拥堵的问题时,政府的参与、引导和协调作用尤为重要。在接下来的部分,我们将通过演化博弈模型对城市交通拥堵治理政策进行深入的探讨。
3 演化博弈模型
3.1 模型描述、假设和符号表示
在城市交通中,不同的出行群体有不同的交通偏好和需求。为了简化模型,我们将所有出行者分成两类。A类表现为公共交通偏好,而B类则更偏向私人交通。在演化博弈过程中,A、B两个群体都只能接触到有限的信息,具有有限的理性,但他们都倾向于模仿、利用他们认为最有利的策略,并改进其过去使用过的策略,即两组都会不断调整自己的策略,最大限度地增加自己的利益。博弈双方的策略包括乘坐公共交通出行的“合作”策略和私家车出行的“背叛”策略。以下是该模型中的假设、参数和符号表述:
a.将A类参与者的合作成本定义为C1,B类定义为C2。合作带来的总收益定义为R,该收益在合作双方之间的分配系数是θ,所以A类参与者的合作收益是θR,而B类参与者的合作收益是(1-θ)R。为了能够得到长期合作这样一个可能结果,模型满足R>C1+C2,θR>C1,且(1-θ)R>C2的条件。
b.K1和K2分别表示完成从起点到终点这一位移任务,A类参与者和B类参与者从中获得的收益。当博弈双方都选择“背叛”策略时,A类参与者和B类参与者仍能获得位移收益K1和K2。
c.考虑到无论采取哪种出行方式,即使时间成本和舒适度会有所不同,但每个人都会到达目的地,所以在每一场博弈中,不管对方策略如何,A类参与者都将获得位K1的位移收益,B类参与者都将获得K2的位移收益。
d.当博弈一方坚持合作而另一方选择了背叛,背叛者获得额外的收益Vi(i=1,2)。当A类参与者坚持合作而B类参与者选择背叛,则B类参与者得到的额外收益V2。若情况相反,则A类参与者得到额外收益V1。
e.当政府采取惩罚性措施时,即利用合作规则惩罚背叛的一方,同时补偿合作的一方:用P表示惩罚,F表示补偿,假设将背叛者承受的惩罚当成对合作者的补偿,即P=F。
f.当政府采取补贴性措施时,即政府通过财政补贴降低公共交通费用来鼓励达成合作:假设当双方都选择合作时,政府为支持该合作策略需要提供的补贴为S。这时A类参与者获得S1,B类参与者获得S2。
g.A类与B类参与者选择合作策略的概率分别为x、y。相应的,选择背叛策略的概率分别为1-x,1-y,这里的x,y∈[0,1]。
3.2 模型分析
首先,基于上述假设和参数建立参与者之间的支付矩阵(见下表1)。接下来,基于每个玩家采取不同的策略及获得的相应收益,我们能够建立起一个复制动态系统。

表1 参与者之间的支付矩阵

EA=y(K1+θR+S1-C1)+(1-y)(K1-C1+F)
A类参与者的平均预期收益为:

EB=x[K2+(1-θ)R+S2-C2]+(1-x)(K2-C2+F)
B类参与者的平均预期收益为:
因此,参与者选择合作策略的动态方程可以分别表示为F(x)和F(y):
(7)
(8)
3.2.1 没有政府干预的演化博弈分析
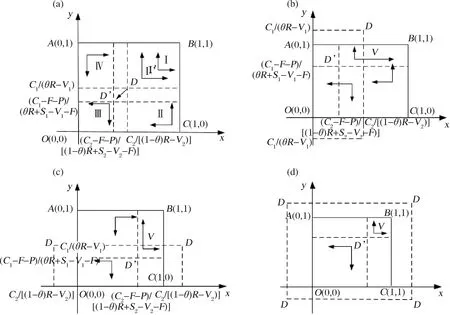
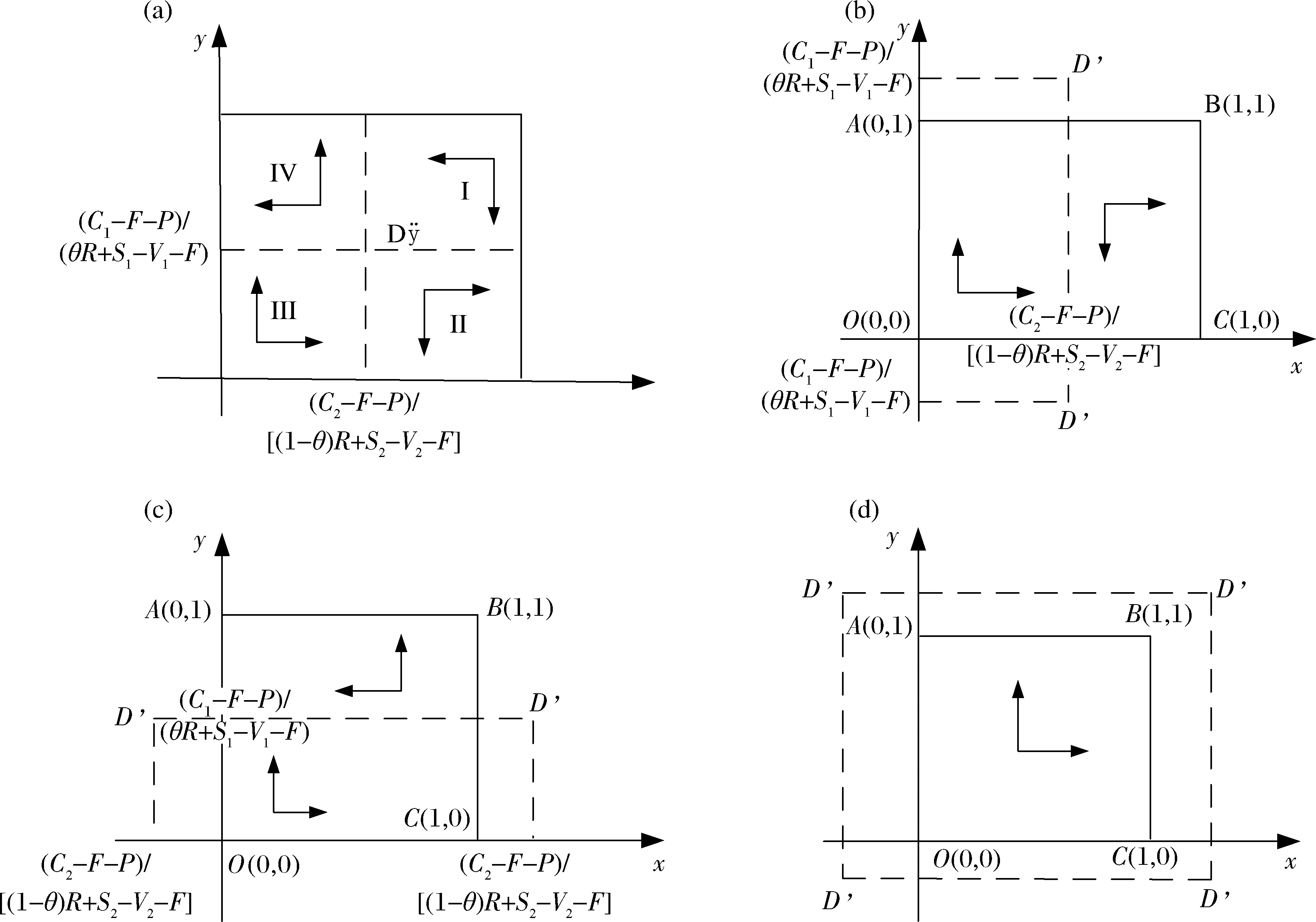
动态演化博弈的均衡点(x,y)需F(x)=0且F(y)=0同时满足,所以点A(0,1),点B(1,1),点C(1,0),点D((C2-F-P)/[(1-θ)R+S2-V2-F],(C1-F-P)/(θR+S1-V1-F)),点O(0,0)是潜在的演化稳定策略(ESS),其中只有当(C2-F-P)/[(1-θ)R+S2-V2-F]∈(0,1)并且(C1-F-P)/(θR+S1-V1-F)∈(0,1)时,D点才会存在。在没有政府干预的情况下,由条件P=F=S=0可以得出如下两个结论:
I.在A和B之间动态重复博弈后,演化稳定策略(ESS)将稳定在(x,y)=(0,0)或者(1,1)。
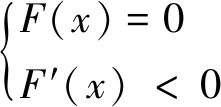
II.当V1+C1<θR且V2+C2<(1-θ)R,即双方的合作收益大于合作成本和背叛额外收益的总和时,博弈可能会演变成稳定策略(x,y)=(0,0)或者(x,y)=(1,1),如图1(a)所示。而在其他情况下,博弈的唯一稳定结果是在(x,y)=(0,0),即绝对的背叛策略。
证明:接下来我们将对上述两个结论进行证明。在该演化博弈模型中,复制动态方程必须满足以下条件,才能得到A和B两类参与者的演化稳定策略:
假设a,V1+C1<θR,即0
假设b,0<θR
假设c,θR-V1<0,即C1/(θR-V1)<0。在这种情况下,由于0
假设d,V2+C2<(1-θ)R,即0
假设e,0<(1-θ)R
假设f,(1-θ)R-V2<0,即C2/[(1-θ)R-V2]<0。在这种情况下,由于0
根据上述不同假设的分析,我们得出了参与者演化稳定策略的相图,如下图1。其中,图1(a)基于对假设a和假设d的分析,描述了当V1+C1<θR且V2+C2<(1-θ)R时演化稳定策略的相图。在这种情况下我们发现,在没有政府出台拥堵治理政策时,(x,y)=(0,0)和(x,y)=(1,1)是参与者最终的演化稳定策略。当(x,y)∈[(C2/[(1-θ)R-V2],1),(C1/(θR-V1),1)],即初始状态落在区域Ⅰ时,博弈最终将稳定在(x,y)=(1,1),即演化稳定策略是A,B两类参与者都选择“合作”。同样,当初始状态落在区域Ⅲ,博弈最终将稳定在(x,y)=(0,0),两类参与者均将 “背叛”作为最终的稳定策略。当初始状态落在区域Ⅱ或区域Ⅳ,演化博弈的稳定策略将具有不确定性,有可能是(x,y)=(0,0),也有可能是(x,y)=(1,1)。
D除了可能落在如图1(a)所示的位置外,另外有其他8个可能的位置,分别为:(1)当0
因此,动态重复博弈后的演化稳定策略将会是(x,y)=(0,0)或(x,y)=(1,1)。而且只有当博弈参与者的合作收益大于其合作成本和背叛收益的总和的时候,最终演化稳定策略才可能是(x,y)=(1,1)。也就是说,只有当选择公共交通达成双方合作时出行者的收益(θR或(1-θ)R)大于选择公共交通的成本(Ci)与背叛额外收益(Vi)之和大,双方合作选择公共交通才有可能成为演化博弈的稳定策略。
3.2.2 政府干预下的演化博弈分析
本文将交通拥堵治理政策划分为了五类:1)经济性政策,指通过经济性措施对车辆所有权、停车权等进行干预,还包括车辆购置或使用税,尾气排放税,道路拥堵收费等;2)汽车使用限制(例如限号出行,专用车道,行人区,限制进入的区域等);3)科技技术,如信息和通信技术(ICT)技术,智能交通系统;4)公共交通政策,指那些公共交通优先权、公共交通票价优惠和补贴等提高公共交通吸引力的措施,以及为提高公共交通吸引力而进行了基础设施维护或修建;5)其他,指不属于以上四种的其他拥堵治理政策,如城市货运管理,城市功能区规划等。政府是否采取交通治理政策,以及政府惩罚或补贴的力度都会对博弈结果产生重大影响。当政府采用某一个或多个交通治理政策来治理交通拥堵时,博弈模型中变量的值将会发生改变(如图2所示),而博弈中平衡点D也将转移到D′的位置(如图3所示)。
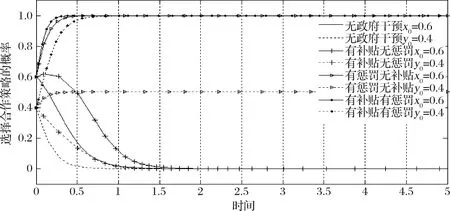
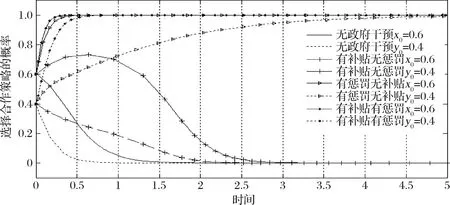
温和的惩罚政策。当政府实施温和的惩罚措施时,即P=F 图1 无政府干预时ESS相图 图2 拥堵治理对博弈模型中变量的影响注:图2中带箭头的线指具有影响作用,箭头表示作用方向,实线表示影响是确定的,虚线表示影响具有不确定性,“+”表示增大作用。 图3 温和的惩罚措施下的ESS相图 严厉的惩罚措施。当政府实施严厉的惩罚措施时,即P=F>max(C1,C2),这种情况下动态演化博弈的结果可以通过下面的分析来得到。 A类参与者在不同假设下的ESS分析如下: 假设a,C1-F-P<0<θR+S1-V1-F,即(C1-F-P)/(θR+S1-V1-F)<0。在这种情况下,由于0 假设b,C1-F-P<θR+S1-V1-F<0,即(C1-F-P)/(θR+S1-V1-F)>1。在这种情况下,由于0 假设c,θR+S1-V1-F B类参与者在不同假设下的ESS分析如下: 假设d,C2-F-P<0<(1-θ)R+S2-V2-F,在这种情况下,我们可以得到(C2-F-P)/[(1-θ)R+S2-V2-F]<0。由于0 假设e,C2-F-P<(1-θ)R+S2-V2-F<0,在这种情况下,我们可以得到 (C2-F-P)/[(1-θ)R+S2-V2-F]>1。由于0 假设f,(1-θ)R+S2-V2-F 根据上述不同假设的分析,我们得到了当政府采取严厉措施缓解拥堵时,演化稳定策略的相图(图4)。可以发现,当政府采取严厉的惩罚措施时,演化稳定策略(ESS)在经历动态的重复博弈之后可能稳定在(x,y)=(0,1),(1,0)或(1,1)。 图4 严厉惩罚措施下的ESS相图 通过对不同政府干预措施下的演化博弈模型进行分析,我们可以得到第三个结论: III.治理拥堵措施可以增加演化稳定策略(x,y)=(1,1)的概率,或者说可以促使出行者选择公共交通出行。而且实施严厉的惩罚措施(本文严厉指罚款高于合作成本)时,演化稳定策略只可能为(x,y)=(0,1)、(1,0)或(1,1),公共出行将明显得到提高,拥堵情况得到明显改善。 为了更具体地说明政府交通拥堵治理政策对演化博弈最终ESS的影响,本文将对模型中的参数进行赋值,对该演化博弈进行仿真模拟。为了说明政府是否采取政策干预,以及干预的方式和力度对结果的影响,我们采取不同的赋值方式描述了三种不同案例情况,并对不同情况下政府政策干预的效果进行模拟分析。 案例一:R=30,C1=5,C2=7,θ=0.6,V1=2,V2=4,S1=S2=3,P=F=3。在这种情况下,V1、V2相对较小,即通勤者对私家车出行的偏爱程度都很低,背叛得到的额外收益并不那么吸引人;政府提供的补助金S1=S2=3;政府对的惩罚性措施不是很严厉,P=F=3 从图5中,我们可以发现,如果没有政府干预,B组参与者选择合作策略的概率y逐渐降低,最终为0并保持稳定,A组参与者选择合作策略的概率x先稍有上升,后迅速下降,直到降为0并保持稳定,这一演化博弈最终ESS策略在1.7时刻变为(背叛,背叛)并保持永久稳定。当政府仅采取补贴性政策但没有惩罚性政策,A组和B组参与者选择合作策略的概率x和y将逐步变大,并先后达到1并保持稳定,这一演化博弈最终ESS策略在2时刻变为(合作,合作)并保持永久稳定。当政府仅采取惩罚性政策但没有补贴性政策,A组和B组参与者选择合作策略的概率x和y将逐步变大,并先后达到1并保持稳定,这一演化博弈最终ESS策略在1.5时刻变为(合作,合作)并保持永久稳定。当政府同时采取补贴性政策和惩罚性政策来缓解交通拥堵问题,A组和B组参与者选择合作策略的概率x和y将以更快地速度逐步变大,在1时刻该演化博弈最终的ESS策略就达到了(合作,合作),并保持永久稳定。 图5 案例一中A,B两类出行者交通选择的演化稳定策略仿真 案例二:R=30,C1=5,C2=7,θ=0.6,V1=10,V2=13,S1=S2=8,P=F=8。在这种情况下,V1、V2相对较大,即通勤者对私家车出行的偏爱程度都很高,背叛得到的额外收益有很强的吸引力;政府提供的补助金S1=S2=8;政府对的惩罚性措施很严厉,P=F=8>max(C1,C2)。A组与B组参与者选择合作策略的概率(x,y)的初始值为(0.6,0.4),分别在政府没采取任何交通拥堵治理政策,政府仅采取补贴性政策,政府仅采取惩罚性政策,政府同时采取补贴性和惩罚性政策四种条件下进行模拟,得到该博弈模型的ESS策略的演变趋势,如图6所示。 图6 案例二中A,B两类出行者交通选择的演化稳定策 从图6中,我们可以发现,如果没有政府干预,A组和B组参与者选择合作策略的概率x和y逐渐降低,最终为0并保持稳定,这一演化博弈最终ESS策略在1.4时刻变为(背叛,背叛)并保持永久稳定。当政府仅采取补贴性政策但没有惩罚性政策,B组参与者选择合作策略的概率y逐渐降低,最终为0并保持稳定,A组参与者选择合作策略的概率x先稍有上升,后迅速下降,直到降为0并保持稳定,这一演化博弈最终ESS策略在1.7时刻变为(背叛,背叛)并保持永久稳定。当政府仅采取惩罚性政策但没有补贴性政策,A组参与者选择合作策略的概率x将逐步变大,最终在0.5时刻达到1并保持稳定,B组参与者选择合作策略的概率y逐渐上升,并在0.5的水平保持稳定。当政府同时采取补贴性政策和惩罚性政策来缓解交通拥堵问题,A组和B组参与者选择合作策略的概率x和y将逐步增大到1,在0.9时刻该演化博弈最终的ESS策略就达到了(合作,合作),并保持永久稳定。 案例三:R=30,C1=4,C2=6,θ=0.6,V1=10,V2=13,S1=S2=8,P=F=8。在案例2的基础上,假设政府鼓励发展智能交通系统(ITS),它提高了公共交通服务的吸引力,降低了博弈双方选择合作博弈的成本C1和C2。A组与B组参与者选择合作策略的概率(x,y)的初始值仍为(0.6,0.4),分别在政府没采取任何交通拥堵治理政策,政府采取补贴性政策,政府采取惩罚性政策,政府同时采取补贴性和惩罚性政策四种条件下进行模拟,得到案例三中该博弈模型的ESS策略的演变趋势,如图7所示。 图7 案例三中A,B两类出行者交通选择的演化稳定策略仿真 从图7,我们可以发现,如果没有政府干预,A组和B组参与者选择合作策略的概率x和y逐渐降低至0,这一演化博弈最终ESS策略在1.6时刻变为(背叛,背叛)并保持永久稳定,稍晚于案例二中的1.4。当政府仅采取补贴性政策但没有惩罚性政策,B组参与者选择合作策略的概率y逐渐降低,最终在2.2时刻达到0并保持稳定,A组参与者选择合作策略的概率x先稍有上升,后逐渐缓慢下降,直到在2.9时刻降为0并保持稳定,这一演化博弈最终ESS策略在2.9时刻变为(背叛,背叛)并保持永久稳定。当政府仅采取惩罚性政策但没有补贴性政策,A组和B组参与者选择合作策略的概率x和y将逐步变大,最终分别在0.5时刻和5时刻达到1并保持稳定,即这一演化博弈最终ESS策略在5时刻变为(合作,合作)并保持永久稳定,该结果不同于案例二中B组博弈者选择合作概率长久保持在0.5左右。当政府同时采取补贴性政策和惩罚性政策来缓解交通拥堵问题,A组和B组参与者选择合作策略的概率x和y将在相对较短的时间内增大到1,在0.8时刻该演化博弈最终的ESS策略就达到了(合作,合作),并保持永久稳定。 通过对上述三个案例的分析,我们可以发现,如果没有政府的干预,x和y逐渐下降到0,演化博弈最终的稳定策略均是(背叛,背叛),这意味实现集体理性离不开政府的干预措施,即缓解交通拥堵问题离不开政府的治理政策。此外,虽然补贴性政策和惩罚性政策都有利于合作均衡的形成,但是相比补贴性政策,惩罚性措施惩罚更为直接和有效,因为和仅仅有补贴性政策而没有惩罚性政策的情况相比,在加入政府惩罚性政策干预的情况下,演化博弈过程中参与者选择合作的概率会较快地提高,或者说该演化博弈会在更短的时间内实现(合作,合作)的最终稳定策略。 本文基于个体理性和集体理性之间的矛盾的视角,运用博弈分析的方法分析了城市交通拥堵的形成。然后利用演化博弈模型分析了不同交通拥堵治理政策的作用机制,并通过采取不同的赋值方式描述了三种不同案例情况,对不同政府干预政策下出行者交通选择的演化稳定策略进行了仿真,使我们能够研究和比较这些政策的效果。我们发现政策干预对缓解交通拥堵至关重要,在没有交通拥堵治理政策时,拥堵的形成与加剧是必然的;其次,仅仅使用补贴性政策不一定总是有效的,或在一开始确实有效,但是效果并不能持久,如第五部分的案例二,当政府提供补贴,但不实施惩罚措施时,起初两组选择“合作”的概率大大增加,但两组最终稳定的ESS均为“背叛”,这也解释了现实中存在的交通拥堵问题治理效果不理想,出现反弹的现象;另外,研究发现虽然补贴和惩罚都有利于合作均衡的形成,相比激励性治理措施惩罚性措施的治理效果更具有迅速性和持久性。 因此,为了提高城市交通的运行效率,政府应当建立适当的机制和政策来引导人们的出行行为,加强出行者之间的合作关系;由于过多的补贴可能会给管理者带来财政压力,且在迅速性和持久性上,惩罚性措施更为有效,因此,综合考虑政策的效率和管理者的压力,在采取措施促进集体理性、缓解交通拥堵时,政府可以建立一种惩罚机制或综合性的补贴加惩罚机制,用来更有效地治理交通拥堵问题。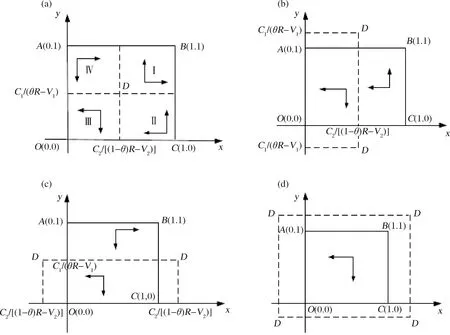
4 仿真分析

5 结语
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23 13:46:18城市公共交通(2021年3期)2021-04-15 06:39:16现代营销(创富信息版)(2018年10期)2018-10-12 03:01:28自动化学报(2017年1期)2017-03-11 17:31:10中国交通信息化(2016年3期)2016-06-05 02:21:43武大国际法评论(2016年2期)2016-06-01 12:12:17华人时刊(2016年13期)2016-04-05 05:50:03中国检察官·司法务实(2014年8期)2014-05-30 20:11:18城市道桥与防洪(2014年6期)2014-02-27 07:27:24中国检察官(2014年15期)2014-02-04 19:36:32