空间机械臂关节的热设计与热分析
2019-07-02 00:53:06刘春龙胡日查张旭升吴清文史士财
载人航天 2019年3期
刘春龙,郭 亮,胡日查,张旭升,黄 勇,吴清文,史士财
(1.中国科学院长春光学精密机械与物理研究所,长春130033; 2.哈尔滨工业大学,哈尔滨150001)
1 引言
作为高端航天设备,空间机械臂直接暴露于冷黑空间环境中,主要用于设备的组装、回收、维修以及航天员难以操作或者无法到达等特殊任务中[1-2]。
关节是空间机械臂的核心部分,是实现各种运动的直接执行部件,其结构组成如图1 所示,主要由制动器、电机、关节转动轴、谐波减速器、关节电箱及快换接口等组件组成[3]。 空间机械臂作为在轨舱外设备,受太阳直射、地球红外和太阳反照等多辐射源的综合作用。 此外,机械臂在轨工作过程中,其姿态随时都在变化,很难确定每个关节所处位置和机械臂的姿态。 面临如此复杂的空间热流环境,需要对其进行精确的热设计,以维持各结构组件温度在允许范围内。 关节的各组件中,电机、制动器、谐波减速器和关节电箱的热耗较大。 模块化的设计确保了内部组件结构紧凑,但也导致热源集中在模块内部、关节散热困难等问题。 因此,获得关节内部组件的温度场分布是关节热设计的重点。
谷利亚[4]对空间机械臂关节进行了在轨温度场数值仿真分析,讨论了包覆层必要性、包覆层的合适厚度以及涂层表面状态对关节温度的影响。 Canadarm 外表面包覆由涤纶网和聚酰亚胺膜组成的多层隔热组件进行保温,组件最外层面膜为白色的Beta 布,保证热控材料免受原子氧侵蚀;在电箱和关键部件上设置加热区来保证机械臂在低温工况的温度水平,其散热面沿关节的圆周方向布置。 鉴于Canadarm 的成功经验,Canadarm2 采用了相同的多层隔热组件设计[5-6]。
本文以国内某机械臂关节为研究对象,结合自身热特性和轨道热环境进行详细的热控方案设计,并运用有限元仿真分析方法进行分析验证。
2 热控设计
2.1 热控指标
关节的温度适应范围较大,根据结构需求,在轨服务期间,不同阶段关节各组件的热控指标如表1 所示。
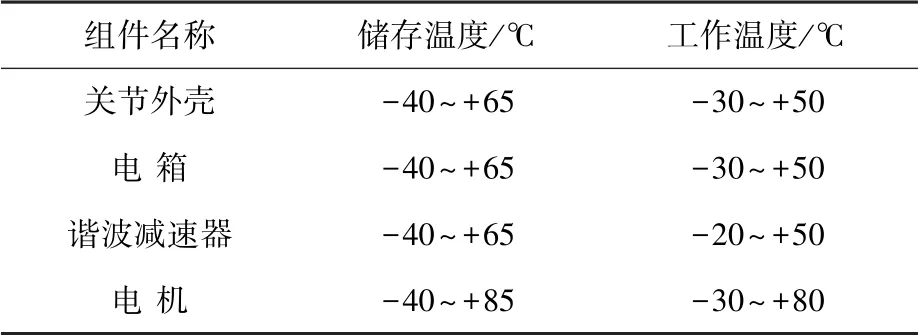
表1 关节各组件的热控指标Table 1 Temperature range of each joint component
2.2 热环境条件
空间热边界:空间机械臂关节受到太阳直射、地球红外及太阳反照等空间外热流的影响。
内部热源:电箱24 W、谐波减速器1.5 W、电机6 W、制动器4 W。
2.3 热控设计
关节控制模块(以下简称电箱)热耗最高,且关节内部热源均可以通过电箱散热,因此在电箱顶部开设散热面,并喷涂KS-ZA 白漆增强辐射能力,散热面位置如图2 所示。 KS-ZA 白漆为无机漆,空间抗辐照性能好,设计表面发射率为0.92,太阳吸收比为0.15。

图2 关节散热面Fig.2 Radiation surface of joint
受关节内部结构限制,电机的热量需要经外壁筒散热,而外壁筒和电箱是导热安装的,因此设计如下导热路径散热:电机→电机外壳→内壁筒→外壁筒→电箱散热面,结构示意图如图3 所示[7]。 各部分之间导热连接,安装接触面涂抹导热硅脂。 在结构设计中考虑散热路径的导热需求,尽量增大安装接触面面积。

图3 关节电机散热示意图[7]Fig.3 Schematic diagram of joint motor heat dissipation[7]
谐波减速器为运动部件,只能通过减小各环节的接触热阻,将热量导向关节壁筒。
为减小不工作时关节的漏热量,除刻度环、指针的指示位置、关节EVA(Extra-vehicular Activity)扶手等外露部位,其它部分均包覆20 单元多层隔热组件。 考虑低轨舱外设备防原子氧剥蚀的需求,参考Canadarm 的成功经验,外面膜采用白色外用型阻燃布。
关节EVA 扶手与关节外壁筒之间使用聚酰亚胺隔热安装,等效热阻不小于15 ℃/W。 为减小EVA 扶手的漏热,扶手表面铝合金光亮阳极氧化处理,设计表面发射率为0.13,太阳吸收比为0.32。
主动控温加热回路采用双回路设计,加热回路均冷备份。 主动加热的位置布置于关节外壳和电箱外表面,其中主份加热回路采用双金属温度继电器进行控制,备份加热回路采用双金属温度继电器和热敏电阻闭环相结合的控制方式。
3 热分析
3.1 热模型
为验证关节热设计的正确性和有效性,采用有限元热分析软件建立了关节组件的热模型,如图4 所示。 共使用3064 个二维壳单元,建立了46 处热耦合。 在不做任何热控处理表面(干接触表面)接触热导系数取300 W/(m2·K),涂抹导热脂的表面接触热导系数取1000 W/(m2·K),多层与本体间接触热导系数取0.16 W/(m2·K)。 分析计算的设置参数如表2 所示。 低温工况的选取原则:机械臂在非工作期间的姿态不固定,因此机械臂的关节散热面朝向也不确定,根据散热面朝向冷黑的极端情况进行计算可以覆盖其它可能出现的低温情况。 高温工况的选取原则:在机械臂工作路径尚未规划的情况下,无法确定关节工作期间所处的位置以及散热面和阳光之间的夹角。因此计算了多个不同光照条件下的高温工况,分析关节处于这些条件下的可工作时间。 材料热属性如表3 所示[7]。

图4 关节热分析模型Fig.4 Thermal analytic model of joint

表2 热分析工况设置Table 2 Conditions of thermal analysis

表3 材料主要参数Table 3 Main parameters of material
3.2 计算结果
3.2.1 低温工况
低温工况关节主动热控平均功耗为14.5 W,各组件温度曲线如图5 所示。 关节散热面处于阴影区、无太阳直射外热流,因此关节电箱温度较低,温度控制在-30.8~-28.9 ℃范围内。 外壳通过多层隔热组件和关节电箱漏热,温度控制在-26.5~-25.2 ℃范围内。 谐波减速器、电机和制动器在关节的内部,对冷黑空间的散热量较小,温度分别为-22.9 ℃、-21.2 ℃和-20.8 ℃。 结果表明,低温工况下关节各组件温度均能满足存储热控指标要求。
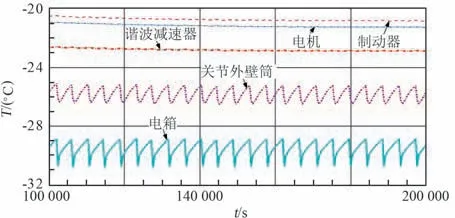
图5 低温工况关节各组件的温度曲线Fig.5 Temperature curve of joint parts under lowtemperature condition
3.2.2 高温工况1
高温工况时电箱散热面对日,吸收的外热流最大。 关节在最恶劣的热环境下工作,分析计算关节各组件达到工作热控指标的时间,为空间机械臂在轨工作时间规划提供数据支撑。 其内部组件和外部组件瞬态温度曲线如图6 和图7 所示。由图可以看出,8 h 后电箱散热面最高温度73 ℃,外壳最高温度56 ℃,出线盒最高温度47 ℃,定子最高温度48 ℃,轴最高温度43 ℃,谐波减速器最高温度42 ℃。 在工作过程中电箱散热面连续工作7360 s(2.0 h)后将超过50 ℃,关节外壳在23 160 s(6.4 h)后超过50 ℃,其他结构满足热控指标要求。 计算结果表明制约关节工作时间的组件为电箱。 为延长关节工作时间,理论上可以通过继续开大电箱散热面的方式解决。 但未选择继续开大散热面有以下2 方面考虑:①本身关节散热面始终对日工作是非常极端的工况,选取这个工况的目的是计算关节在极限情况下工作能力;②受飞行器总体提供低温工况补偿功耗的限制,不具备继续开大散热面的条件。
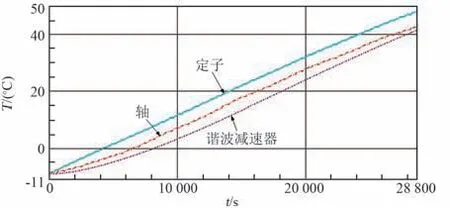
图6 高温工况1 关节内部组件瞬态温度曲线Fig.6 Transient temperature curve of internal joint parts under high-temperature condition 1
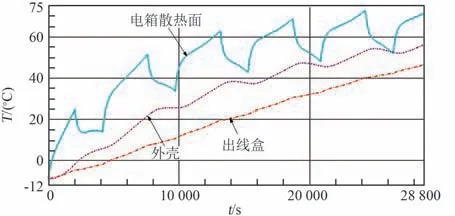
图7 高温工况1 关节外部组件瞬态温度曲线Fig.7 Transient temperature curve of external joint parts under high-temperature condition 1
3.2.3 高温工况2
该工况下关节散热面持续正对日工作1 轨后,转向冷黑并持续工作1 轨,再持续正对日工作1 轨,其瞬态计算结果如图8 和图9 所示。 由图可以看出,此时电箱散热面最高温度59 ℃,外壳最高温度44 ℃,出线盒最高温度35 ℃,定子最高温度39 ℃,轴最高温度33 ℃,谐波减速器最高温度32 ℃。 在工作过程中电箱散热面连续工作16 000 s(4.4 h)后将超过50 ℃。
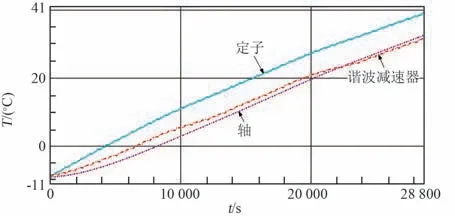
图8 高温工况2 关节内部组件瞬态温度曲线Fig.8 Transient temperature curve of internal joint parts under high-temperature condition 2
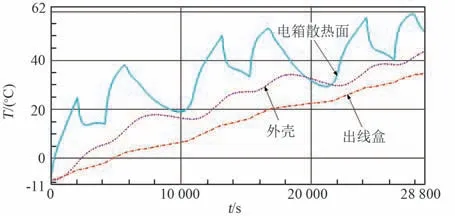
图9 高温工况2 关节外部组件瞬态温度曲线Fig.9 Transient temperature curve of external joint parts under high-temperature condition 2
3.2.4 高温工况3
该工况下关节散热面持续正对日工作1 轨后,转向冷黑并持续2 轨,再持续正对日工作1轨。 其瞬态计算结果如图10 和图11 所示。 此时电箱散热面最高温度54 ℃,外壳最高温度36 ℃,出线盒最高温度29 ℃,定子最高温度36 ℃,轴最高温度30 ℃,谐波减速器最高温度28 ℃。 在工作过程中电箱散热面连续工作21 480 s(6.0 h)后将超过50 ℃。
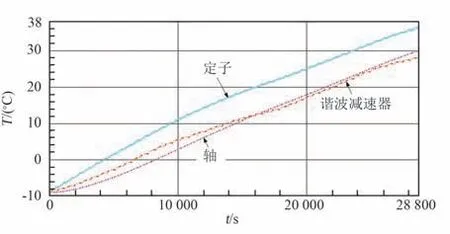
图10 高温工况3 关节内部组件瞬态温度曲线Fig.10 Transient temperature curve of internal joint parts under high-temperature condition 3
3.2.5 高温工况4

图11 高温工况3 关节外部组件瞬态温度曲线Fig.11 Transient temperature curve of external joint parts under high-temperature condition 3
该工况下关节散热面对日,并与阳光之间的夹角始终保持20°,并连续工作8 h。 其瞬态温度曲线如图12 和图13 所示。 该工况下,此时电箱散热面最高温度48 ℃,外壳最高温度37 ℃,出线盒最高温度34 ℃,定子最高温度37 ℃,轴最高温度31 ℃,谐波减速器最高温度29 ℃。 按高温工况4 的模式工作8 h,关节各组件温度均满足热控指标。
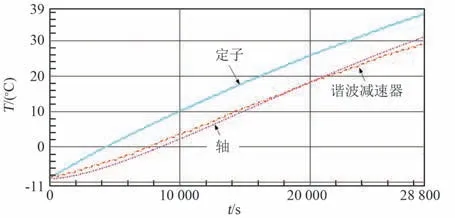
图12 高温工况4 关节内部组件瞬态温度曲线Fig.12 Transient temperature curve of internal joint parts under high-temperature condition 4

图13 高温工况4 关节外部组件瞬态温度曲线Fig.13 Transient temperature curve of external joint parts under high-temperature condition 4
4 结论
1)低温工况下主动热控平均功耗为14.5 W,电箱和外壳的温度分别控制在-30.8~-28.9 ℃和-26.5~-25.2 ℃范围内,关节各组件温度均能满足存储热控指标要求。
2)高温工况下限制关节工作时长的组件为电箱,在太阳直射散热面的情况下单次最长工作时间为2.0 h;1 轨太阳直射散热面、1 轨散热面对阴影区的情况下最长工作时间为4.4 h;1 轨太阳直射散热面、2 轨散热面对阴影区的情况下最长工作时间为6.0 h;太阳光线与电箱散热面夹角为20°时关节可工作最长时间为8.0 h。 上述计算结果可为空间机械臂在轨工作时长规划提供数据支撑。
参考文献(References)
[1]张凯峰, 周晖, 温庆平,等.空间站机械臂研究[J].空间科学学报,2010,30(6):612-619.Zhang K F,Zhou H, Wen Q P, et al.Review of development of robotic manipulator for international space station [J].Chinese Journal of Space Science,2010,30(6):612-619.(in Chinese)
[2]于登云, 孙京, 马兴瑞.空间机械臂技术及发展建议[J].航天器工程,2007,16(4):1-9.Yu D Y, Sun J, Ma X R.Suggestion on development of Chinese space manipulator technology [J].Spacecraft Engineering,2007,16(4):1-9.(in Chinese)
[3]刘宏,蒋再男,刘业超.空间机械臂技术发展综述[J].载人航天,2015,21(5):435-443.Liu H,Jiang Z N,Liu Y C.Review of space manipulator technology [J].Manned Spaceflight, 2015,21(5):435-443.(in Chinese)
[4]谷利亚.空间机械臂关节在轨温度场数值分析[D].北京:北京交通大学,2016.Gu L Y.Numerical Simulation of Temperature Field of a Space Manipulator Joint[D].Beijing: Beijing Jiaotong University, 2016.(in Chinese)
[5]Kleiman J I,Iskanderov Z,Antoniazzi J.Long term flight performance of high diffuse reflectance Ag/Teflon coverings flown on Canadian mobile serving station, MSS [C]/ / Aerospace conference IEEE, Big Sky, Montana, 2009:41-46.
[6]Antoniazzi J, Milligan D.A review of lubrication on the canadarm2 [J].Protection of Materials and Structures From Space Environment, 2004,5: 291-298.
[7]石进峰.空间机械臂热控制关键技术研究[D].长春:中国科学院长春光学精密机械与物理研究所,2014.Shi J F.Study on Thermal Control Technique of Space Robotic Arm [D].Changchun:Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences,2014.(in Chinese)
猜你喜欢
今日农业(2022年16期)2022-11-09 23:18:44
今日农业(2022年15期)2022-09-20 06:55:48
环球时报(2022-06-20)2022-06-20 17:06:23
能源工程(2022年2期)2022-05-23 13:51:50
防爆电机(2020年3期)2020-11-06 09:07:36
重型机械(2020年2期)2020-07-24 08:16:16
装备制造技术(2019年12期)2019-12-25 03:07:36
基层中医药(2018年8期)2018-11-10 05:32:06
中国光学(2015年5期)2015-12-09 09:00:39
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:07