基于模糊感知阻抗的交通分配研究*
2019-07-01 06:27:20虞春滨杜牧青刘海生
武汉理工大学学报(交通科学与工程版) 2019年3期
虞春滨 杜牧青 刘海生
(河海大学土木与交通学院 南京 210098)
0 引 言
我国城市交通拥堵问题已经成为常态.刘治彦等[1]就我国城市拥堵成因与治理对策进行了深入分析,认为迅速增长的交通需求与有限的交通供给是导致交通拥堵的内在原因.因此,在城市道路交通规划与管理工作中,合理的分配道路资源和引导需求,对缓解因供需不匹配导致的拥堵问题具有十分重要的作用.这些工作往往建立在正确的城市道路网络流量分配预测基础之上,合理的预测交通流量分配是城市交通管理者评价规划和管理决策方案的重点工作之一.其中,路段阻抗的确定是较为重要的工作内容.但城市中的路段所处区位不同,每条路段的交通量也不一样,加上其他一些因素,这就会使得每条道路的阻抗有明显差异.目前,城市道路网络分析中结合了复杂网络理论.Porta等[2]研究发现,1 mile2范围内的城市道路网络均为无标度网络,并具有小世界特性.也就是说,在此范围内的城市道路网络中,道路的重要程度和道路之间的连接性强度是有显著差异的.邓亚娟等[3]利用对偶拓扑理论分析了复杂公路网络中每条道路的重要程度.通过复杂网络理论可以更好地分析网络本身的一些特性,使得阻抗函数更加合理.
对于交通阻抗的研究,Luo等[4]基于传统的波动理论,提出了一种新的交通阻抗模型来计算路段和交叉口的阻抗.王文静等[5]根据实际情况重新标定了BPR型阻抗函数的参数,然后基于Logit离散选择模型进行交通流量分配.刘宁等[6]在BPR的基础上,引入影响车辆通行时间的交叉口密度、道路限速、饱和度等因素,从而建立了启发式道路阻抗函数,并根据大连的实际情况,标定了阻抗函数各参数.但这些阻抗函数没有考虑驾驶员的一些特性及其他不确定因素.模糊感知阻抗方面, Li等[7]将个人的出行费用定义为一个模糊变量,出行的发生和吸引量定义成一个随机变量,从而提出了一种机会约束的极大熵模型.吴祥标[8]在模糊路径选择中对模糊感知阻抗进行分析,进一步强调利用模糊理论研究出行行为的重要性.通过较为合理的道路阻抗预测,进一步得到流量分配,从而较好指导城市内部的交通疏散[9].本文在原有的路段阻抗基础上,添加了附加的模糊感知阻抗.
模糊感知阻抗主要考虑了模糊感知时间、路段重要度和路段流量三个因素,然后根据模糊理论分类并建立隶属度函数得到附加阻抗,从而使得原有阻抗函数更加全面的诠释交通特性,符合现实的交通状况,并更好地确定城市道路网中的拥挤路段.
1 理论基础
1.1 网路拓扑和节点度
将实际路网进行原始拓扑,可以得到每个节点的连接情况.此外,利用对偶法进行路网拓扑结构构图,即把原来同名的道路交叉口转化为边,把道路转化成节点.经过这样的处理后,能够从不同的侧面了解所研究的路网结构,掌握不同路段的连接关系,从而能够较为准确地判定哪些路段在整个路网中占据了主要地位.网络拓扑图见图1.
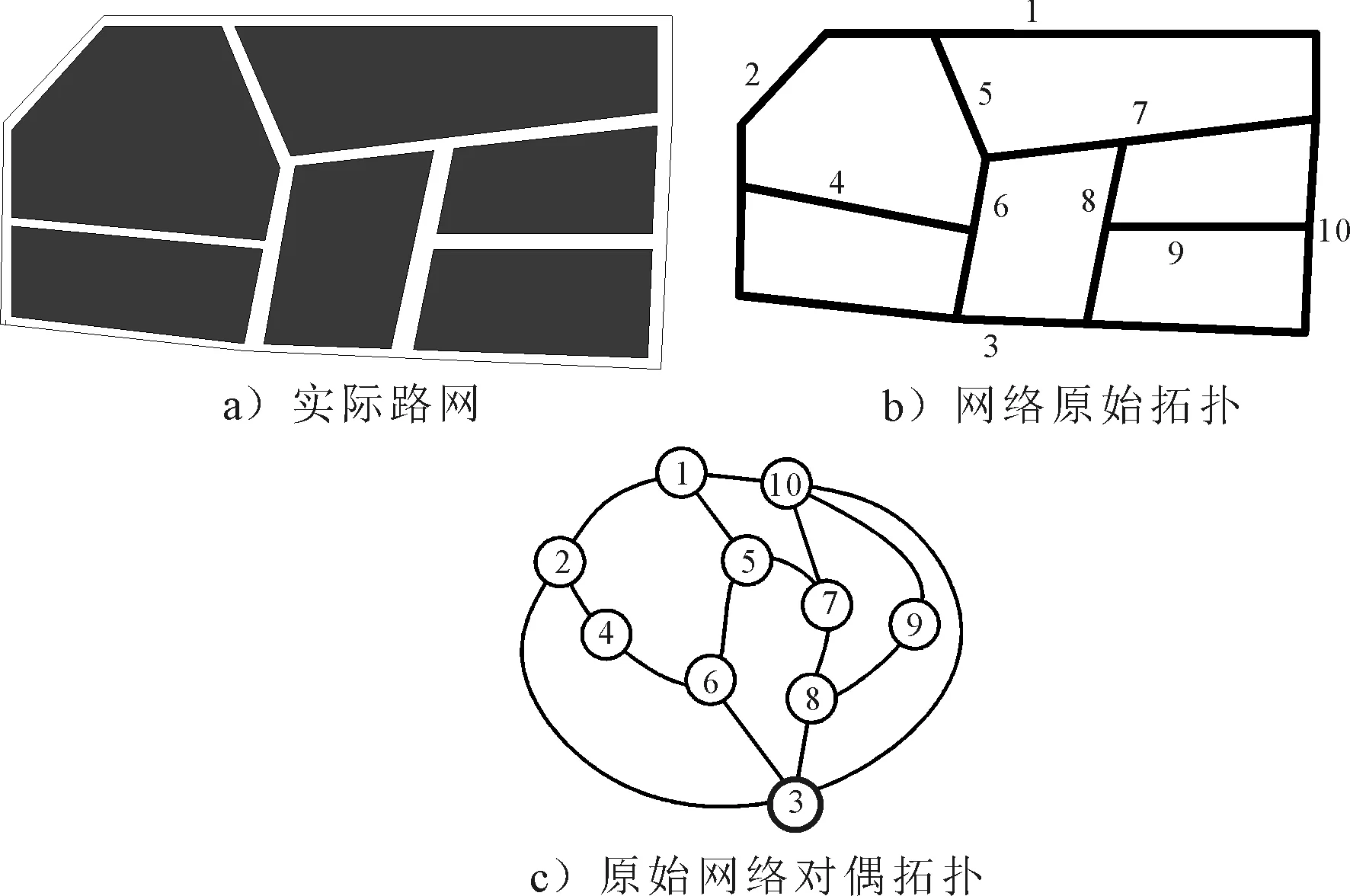
图1 网络拓扑结构图
度,是单独节点的一个重要属性,节点i的度ki为与该节点连接的其他节点的数目.直观上看,一个节点的度越大就表明这个节点在某种意义上越重要.
1.2 节点的重要度评估
网络节点的重要程度可以通过网络的凝聚度来表示,即可以用节点数n与网络的平均距离l的乘积的倒数来表示
(1)
式中:dij为网络中连接两个节点i和j的最短路径上的边数.
利用网络节点收缩方法,网络的节点收缩示意图见图2.
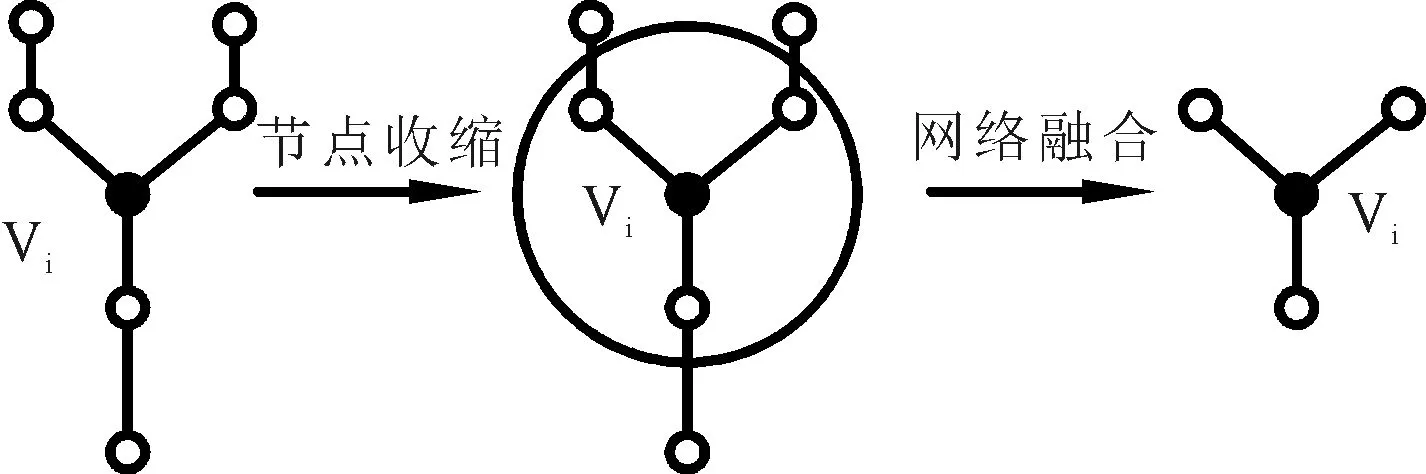
图2 节点收缩示意图
在无权的复杂网络中节点重要度IMC(vi)的判定方法为
(2)
式中:G·vi表示图G=(V,E)中节点vi收缩后得到的图.
如果网络中的某一节点越重要,则通过上述网络节点收缩法得到的网络就越小,由式(2)计算得到的值就越大,这就可以反映网络中不同节点的重要度.从上述的定义可知,网络节点的重要度主要与该节点在网络中的位置和其连通性有关.利用对偶图可以得到每个节点在网络中的重要度,然后根据对偶关系确定原路网中路段的重要度.
1.3 模糊聚类和指标评价
1.3.1模糊聚类法
1) 数据矩阵 设论域U={x1,x2,…,xn}为被分类对象,每个对象有个不同的性状指标,即xi={xi1,xi2,…,xim},(i=1,2…,m).
2) 数据标准化 利用平移-极差变换,将数据压缩到[0,1]上,可得
(3)
3) 相似矩阵标定 对原始数据矩阵按照传统聚类方法确定相似系数,建立模糊相似矩阵rij=R(xi,xj),建立相似矩阵的方法采用欧式几何距离法.
j=1,2…,n)
(4)
然后通过rij=1-c×dij进行换算,其中c为常数,一般取较小的值,如c=0.1.
4) 聚类分析 传递闭包法,将R改造成模糊等价矩阵R*,利用二次方法求R的传递闭包t(R),得到t(R)=R*.
λ截矩阵法,其中λ<1.将上述的R*按一下规则变换:R*中元素小于λ取为0,反之取1.即得到一个元素为0或1的矩阵,进而得到分类结果.对于每一个λ就有一种分类,按照λ从大到小取值得到不同的分类结果.
1.3.2分类指标评价
利用F统计量确定最佳分类,设对应于λ的分类数为r,第j类的样品数为nj.
(5)
(6)
定义F统计量为
(7)
定义的F统计量服从自由度为(r-1,n-r)的分布.

由统计量F的性质可知,F值越大,表明类别间的差异越显著,分类效果就越好.
具体的模糊聚类和F统计值的评价流程图见图3.

图3 模糊聚类和F统计值评价流程图
2 建立模型
2.1 交通路阻函数
交通路段阻抗函数主要有以下几种.
1) 由美国联邦公路局开发的路阻函数,BPR模型的表达式为
(8)

2) Davidson道路阻抗模 Davidson针对BPR阻抗函数中路段车流量不受通行能力限制的缺点对其进行了改进,提出Qi/Ci=1.0为竖直渐近线的道路阻抗函数,具体表达式为
ti=t0×[1+j×Qi/(Ci-Qi)]
(9)
式中:j为待确定参数;ti为车流经过路段i所需要的时间;t0为车流经过路段的自由流通行时间;Qi为路段i上的车通量;Ci为路段i的设计通行能力.
3) 启发式的路阻函数 日平均出行总时间T表示为1 d内车辆通行时间对日交通量的加权平均值,即
(10)
代入式(8)整理得:
(11)
式中:qi为第i时间段内的交通量;ηi为交通量的时间系数(时间段i内的交通量qi与日交通量Q的比值).
路段阻抗函数主要表征了行程时间和交通量的关系,只是从交通流自身特性来体现路段阻抗,忽略了驾驶员对于道路网络自身结构特性的模糊感知以及行程时间对交通阻抗的影响.
2.2 模糊感知阻抗
在现实中,出行者对于所要使用的道路的时间费用的概念是模糊的.如导航显示:本次行程大约需要29 min,通过某路段大约需要9 min,这条路段比较重要,这个交叉口的很拥堵等.现实生活中高德地图导航的实际情况见图4.

图4 行程时间
由图4可知,真实的阻抗难以准确度量,只能利用更加符合实际情况的阻抗值.一般而言,有经验的驾驶员会主动避免那些经常拥堵且又是主要道路的路段.因为驾驶员认为,这些路段容易吸引较多的车流进而导致拥堵,实际的行程时间会远大于导航软件所提供的估计时间.
此外,路段阻抗函数中自由流时间是利用设计车速得到的,而城市道路中大部分车辆行驶车速一般都是小于设计车速的.因此,提出模糊附加阻抗使求得的阻抗值更加接近实际情况.具体方法为在原有的路段阻抗函数的基础上增加一个模糊阻抗值.
Ri=tai+εi
(12)
式中:tai为每路段上的原有阻抗值;εi为每条路段的附加阻抗值.
本文为简化研究,所采用的是美国联邦公路局开发的路阻函数,在此基础上附加模糊阻抗值进行了研究.
2.3 模糊感知阻抗值的确定
模糊感知阻抗的大小主要由感知行程时间、道路网路段重要度和路段机动车流量来确定.利用模糊聚类分析法将路段的等级进行分类,得到每一段道路所属的等级.这里假定所属等级越高表明驾驶员对于该路段的感知模糊阻抗值越大,反之越低,然后确定各路段的附加阻抗值.为简化研究,考虑到附加阻抗值只是对于原始阻抗的修正,权重不超过原始阻抗,采用所有路段的阻抗值的均值作为附加阻抗的上界,将隶属函数取为线性.具体流程图见图5.
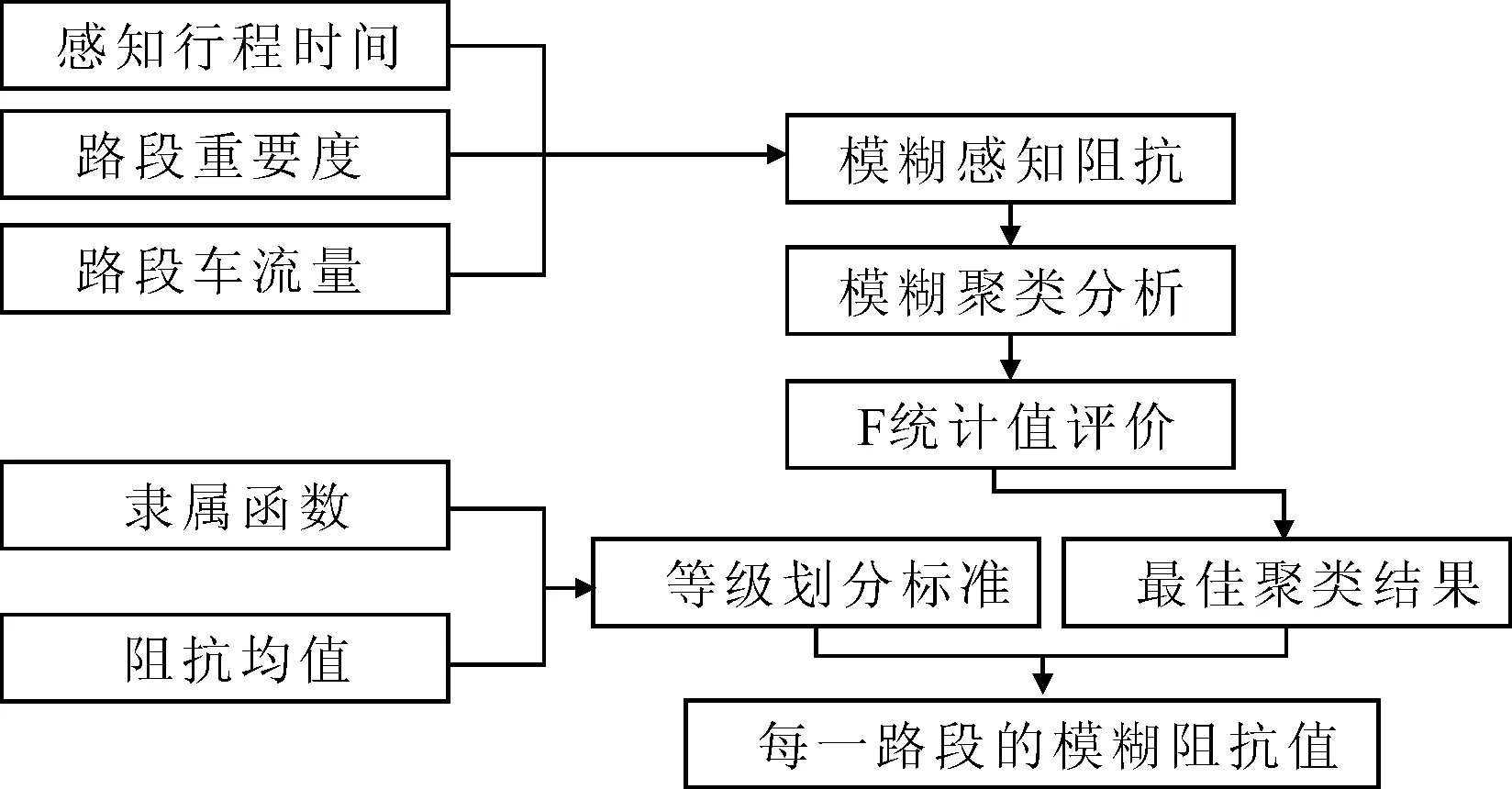
图5 模糊感知阻抗的计算流程
3 算 例
根据实际情况将某地区路网简化得到以下拓扑图,具体的路网原始拓扑图见图6.图中的编号为整段道路的编号,比如,编号11为中山西路,其包括了四条路段.这里与平常的编号方式不同.利用复杂网络的理论,将上述网络进行对偶拓扑得到图7,根据式(1)~(2)求解对应原始网络中路段的重要度.求解结果见表1.

图6 网络原始拓扑图及道路编号 图7 道路网络对偶拓扑图
表1 道路重要度计算结果

1234567891011121314535236322223550.450.320.430.190.270.470.270.200.210.180.180.180.470.47
由表1可知,道路1,6,13,14的重要度相对较大,道路9,10,11,12的重要度相对较小.然后将实际路网的节点进行1~36编号,见图8.
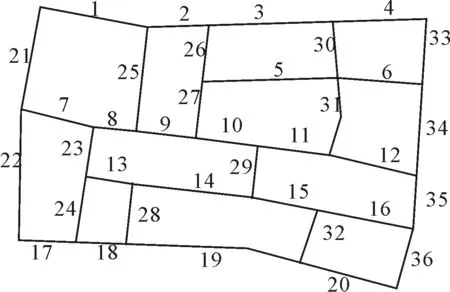
图8 路段编号
根据道路网路段的长度与设计车速计算得到每段道路的大约通行时间(min),每段路的车流量(pcu/h)根据表5数据交通分配模拟得到,城市主干道通行能力取建议值1 000 pcu/h,计算得到BPR原始阻抗值(min),具体数据见表2.
通过模糊聚类分析方法得到标准化矩阵,相似矩阵和传递闭包.本文考虑了36条路段,因此,得到的传递闭包为36×36维度的矩阵,矩阵中的元素表示相应两路段之间的相关性程度.简化的传递闭包矩阵见图9.
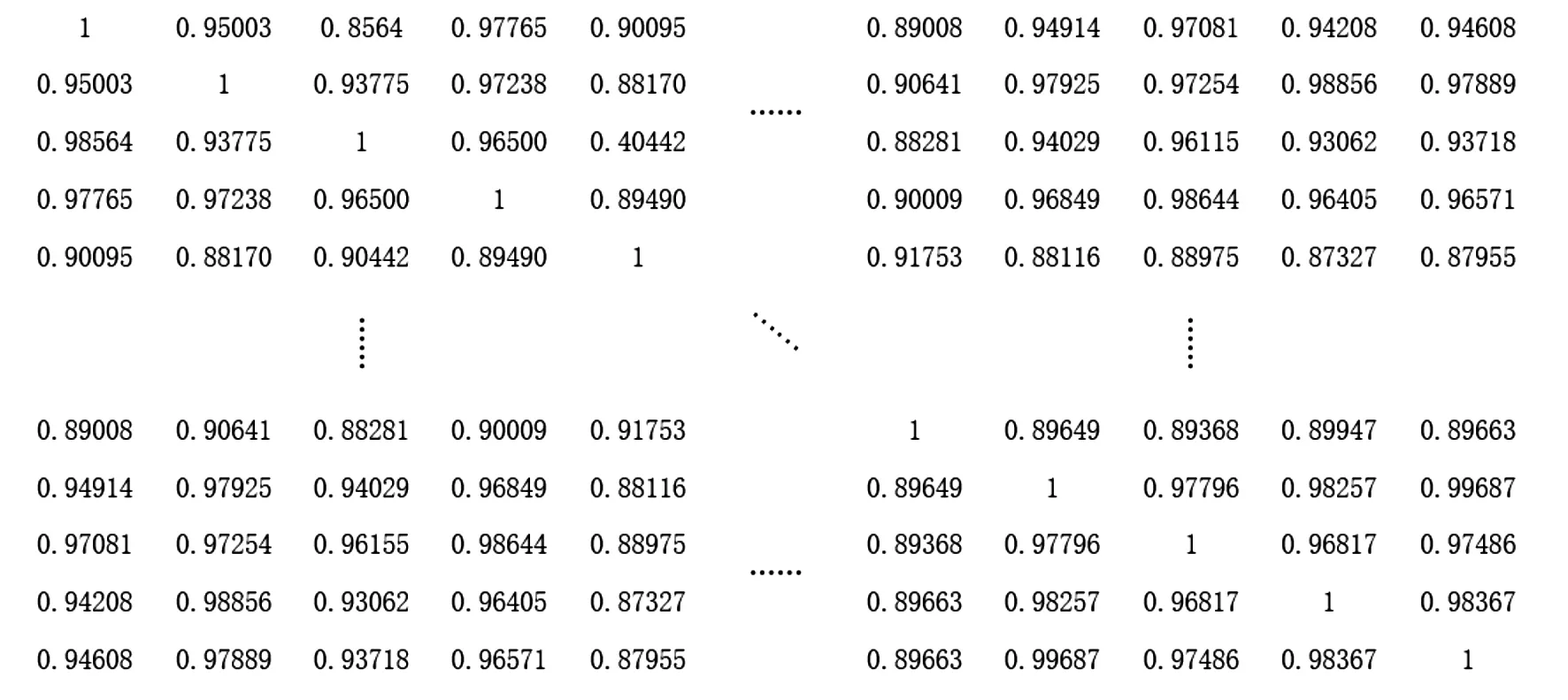
图9 传递闭包矩阵
据此计算不同λ的截矩阵,根据截矩阵聚类得到相应的分类,然后通过F统计量计算相应的评价指标值,具体数据见表3.
由上述计算结果可知,当分类数为8类时,类别间的差距越大,分类效果相对好,此时的具体分类为路段{1~4,7~18,20,33~36},{19},{28,29},{23,24,26,27},{22},{21},{6,25,30~32},{5}.
表2 路段基础数据值

123456789101112/min2.011.052.221.282.281.551.200.761.051.051.281.65/(pcu·h-1)52760337855638353742273197923693141BPR/min2.031.072.231.302.281.551.250.761.051.161.321.65131415161718192021222324/min0.860.952.191.801.050.882.691.691.872.080.841.05/(pcu·h-1)1 0431 4817682011 3771 253884562853222904862BPR/min1.011.642.301.801.621.212.941.722.022.080.921.14252627282930313233343536/min1.800.990.900.970.900.951.300.901.081.490.901.02/(pcu·h-1)2306758471 2201 627394561691293386527287BPR/min1.801.020.971.291.850.951.320.931.081.490.911.02
表3 F统计量计算值

λ0.958 830.970 130.979 040.980 340.980 873681112F1.584 322.531 132.661 631.867 711.685 74
再结合线性的隶属函数和阻抗均值得到不同等级的额外阻抗值.为简化计算,将这8类平均分配为八个等级程度(A~H),即{1~4,7~18,20,33~36}对应等级A,{19}对应等级B,以此类推.每个等级对应的额外阻抗见表4.
表4 不同等级额外阻抗对应值

ABCDEFGH/min0.80.70.60.50.40.30.20.1
结合表4的额外阻抗值和原始的BPR函数得到新的阻抗.其中假定小区间的OD出行量,具体数值见表5.
表5 交通小区间OD需求量
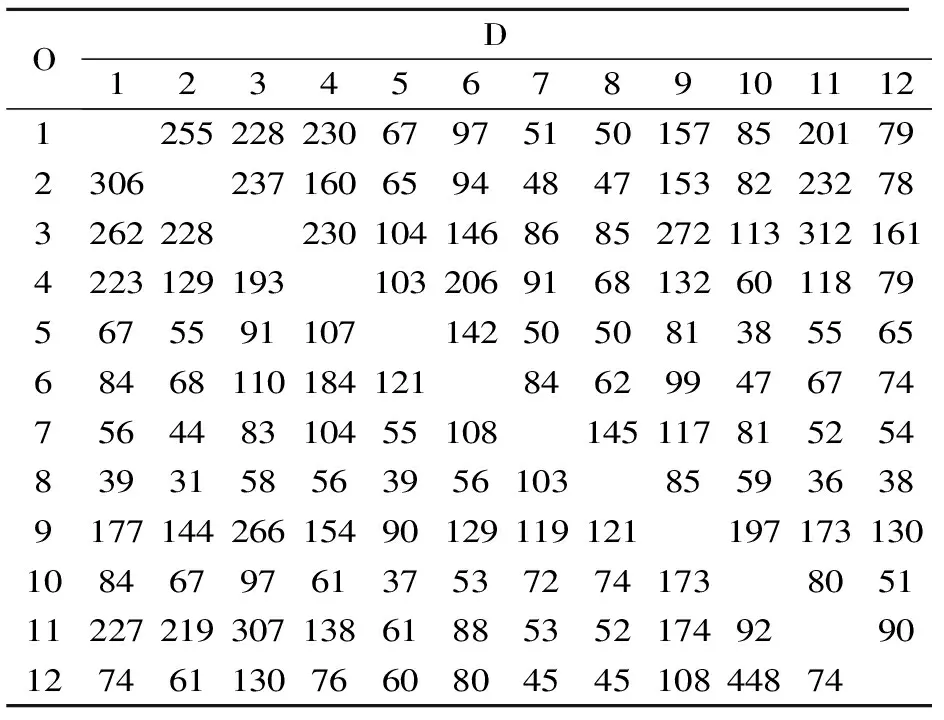
OD1234567891011121255228230679751501578520179230623716065944847153822327832622282301041468685272113312161422312919310320691681326011879567559110714250508138556568468110184121846299476774756448310455108145117815254839315856395610385593638917714426615490129119121197173130108467976137537274173805111227219307138618853521749290127461130766080454510844874
路段阻抗函数采用美国联邦公路局开发的BPR函数,根据以上求解得到的结果,利用TransCAD软件进行流量分配,最后得到原始阻抗下的交通流分配和考虑模糊阻抗的交通分配结果.具体情况见图10.

图10 改进前后的流量分配
由图10可知,在相同的OD分布的情况下,考虑模糊感知阻抗对于整体路网的配流有着很大的影响.图10a)中路段14流量相对较大,而在图10b)中,路段14的流量大幅度下降.
现从具体的路径考虑,选取了小区1到小区8.改进前后的最短路径见图11.然后同时考虑改进前后这两条路径的费用情况,具体路径编号见图12.

图11 改进前后最短路径
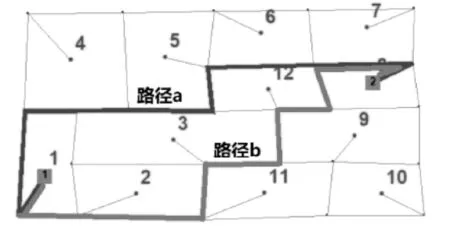
图12 不同路径和编号
通过分析得到,改进前的最短路径b的费用为8.9 min,路径a为9.8 min,驾驶员更加偏向于选择路径b,即图12a).通过考虑了模糊感知阻抗,由于不同路段的模糊感知阻抗值有差异,使得最短路径发生变化.改进后的最短路径a的费用为13.4 min,路径b为14.2 min.通过计算可知,路径a增加的模糊感知阻抗值占原有阻抗值的36.73%,而路径b增加的模糊感知阻抗值占原有阻抗值的59.55%.可见,路径b增加的模糊感知阻抗值所占比例相较于路径a更大.其次,路径b经过上述表1计算得到的重要度比较大的道路3和13中的某些路段,重要度分别为0.43和0.47.此外,这些路段在表2中对应的机动车流量也较大,流量大多在1 000 pcu/h左右.综合考虑这些因素,驾驶员更加偏向于选择其他路径来取代路径b.由于路径a经过的路段重要度相对路径b较小,路段上的机动车流量也没那么大,所以使驾驶员在路径a和b之间更加倾向于选择路径a出行,即图11b).
不同路径在考虑模糊感知阻抗后所增加的阻抗值是有差异的,进一步会影响最短路径的确定.并且在道路网络流量分配的时候相较于原始的流量分配有很大的不同,使得图11b)中拥挤路段流量下降,流量分配更加合理.
从城市规划预测的角度而言,通过对原始路阻函数的调整,考虑模糊感知阻抗后的交通分配更加符合实际情况,规划者能够更好地预测城市路网拥挤路段从而制定相应的方案.此外,模糊感知阻抗可以附加到其他的路段阻抗函数,从而进行更加深入的研究,为更加准确地预测城市交通流量分配提供了一个新的方向.
4 结 束 语
从原始的路段阻抗函数出发,结合模糊阻抗值,利用路段上的感知行程时间、路段重要度和路段流量值进行模糊聚类分析以确定不同等级的额外阻抗值.建立了综合的阻抗模型,改善单一路段阻抗函数存在的局限性,使新建立的路段阻抗函数更加符合实际.通过算例分析,改进后的阻抗使得原有路网的交通量分配更加接近实际情况,从而使交通规划者能够更加合理地预测交通状况,并采取相应的措施.下一阶段将考虑其他环境因素对于路段阻抗函的综合性影响,采用新的技术手段提高模型的精度,为更加合理的交通分配预测提供技术支持.
猜你喜欢
工会博览(2022年5期)2022-06-30 05:30:18
中国交通信息化(2021年2期)2021-07-22 07:34:40
IEEE/CAA Journal of Automatica Sinica(2021年2期)2021-04-22 03:54:26
铁道通信信号(2020年9期)2020-02-06 09:15:22
建材发展导向(2019年11期)2019-08-24 06:34:56
数学大王·趣味逻辑(2019年5期)2019-06-13 20:27:43
小学科学(学生版)(2019年5期)2019-05-21 01:00:18
经济技术协作信息(2018年30期)2018-11-22 06:20:24
环球飞行(2018年7期)2018-06-27 07:25:54
中国公路(2017年11期)2017-07-31 17:56:30