
区域性多目标长距离移动跟踪室内定位系统设计
2019-06-27 03:44:54王晓云
西安工程大学学报 2019年3期
王晓云
(安徽信息工程学院 机械工程系,安徽 芜湖 241000)
0 引 言
20世纪70年代,美国陆海空三军研发出空间卫星导航定位系统,该技术能够实时提供海陆空3方面的导航服务。步入21世纪以后,GPS定位系统的发展更为迅猛,目前成熟的GPS卫星星座有24颗,确保地球任何一个位置点的信息都能够被准确采集。近年来,GPS技术进步更为迅猛,不仅能够实现定位,同时能够完成目标追踪[1]。
文献[2]提出一种HMM-KFMC算法,该算法针对室内环境下人的运动特征建立隐藏马尔科夫模型(HMM),并基于概率型算法改进了解码定位算法,通过含地图修正的卡尔曼滤波器(KFMC)降低解码定位造成的量化误差并用滤波所得速度分量修正HMM的转移概率,但是该算法的智能性很低,隐藏较深的目标不能精准地确定出其所在位置;文献[3]提出了一种基于时间差的定位方法(TDOA)的多目标定位的改进算法,由于人员走动时,会引起超声波信号的多普勒效应,因此预先估计多普勒频移并补偿,以监测准确频点时刻,通过RSS、布置图,以及步速信息进行协同处理,考虑到不同锚节点对均方误差有不同影响,找出最近的4个声定位节点,进行CHAN算法定位,经仿真和现场测试具有较高定位精度,但是该算法在定位室内目标时,定位数量较少,敏感度很低。
本文在GPS定位技术的基础上开发一种新型室内定位系统,该系统能够同时实现区域性长距离跟踪定位、多目标跟踪定位,是一款智能性较强,敏感度较高的定位系统。该系统将图像检测技术、识别跟踪技术和精密运动分析技术同时引入其中,即使在大场景中也能够同时对多个运动目标进行快速连续跟踪捕捉。
1 硬件设计
本文设计的区域性多目标长距离移动跟踪室内定位系统采用了ARM处理器,内部芯片选用型号为TA64的植入式跟踪芯片和型号为CS652的定位芯片,电源设计分为并联和串联2种形式,存储器借助FLASH形式存储程序和参数,触屏器为LCD触屏,整个室内定位系统硬件部分通过以太网连接。区域性多目标长距离移动跟踪室内定位系统硬件总体架构,如图1所示。
1.1 电源设计
在硬件定位系统中,电源占据重要地位,为系统提供动力。电源结构类型分为2种:集中式供电和分布式供电。集中式供电结构是由一个模块组成的结构,使用过程中无法再次分割,工作效率高,但灵活性差;分布式供电类型由多个模块组成,使用时可以随意组装,灵活拆分,但是工作效率较低。本文研究的室内定位系统综合考虑了集中式供电和分布式供电的优点和缺点,将两种结构结合到一起,构建了电源硬件,如图2所示。
由图2可知,电源电路的连接方式有串联和并联2种,在调整单元有源器件和负载端串联,变压器和控制端的连接方式为并联,确保工作模式始终为在线性模式。集射电压在15~25 V,产生的功率在100~500 W。电源电路能够允许多种类型的电压通过,内部的复位芯片产生复位信号,最大程度提供动力[4]。
1.2 追踪采集器设计
追踪采集器由信号调理板和DSP主板2部分组成。采集追踪过程除了能接收到追踪目标信号之外,也能接收到X光衍射信号和滤波信号,这些干扰信号会影响追踪结果的准确性,因此在向采集器内部存入信号之前, 先要将干扰信号剔除。DSP主板的主要工作是采集和处理过滤后的数据,采集数据通过USB接口传送给计算机。信号调理板对信号的追踪方式为硬件滤波方式,DSP主板对信号的追踪方式为软件滤波方式,这样的结合方式提高了抗干扰效果,同时采集速率可以达到10 Mbit/s[5]。
由于追踪时容易受到环境和干扰设备的影响,信号会出现不稳定,所以必须要放大信号的采集过程,将电压信号变成标准信号,放大方式为逐层放大,放大层数为4层:第一层电路为运放电路,防止信号漂移;第二层电路加入滤波芯片,筛选出干扰信号;第三层电路引入光电隔离;第四层电路将电压输入到采集器之中,放大分析追踪信号[6]。
1.3 处理器设计
定位系统选用Intel公司研发的酷睿I3-330处理器,主频为2.13 GHz,缓存方式为三级缓存,硬盘存储量为320 GB,显卡为ATI Mobility Radeon 独立显卡。处理器内部拥有4个参考电源,8个放大器,16个高速处理通道,A/D转换芯片能够同时将所得的数据转换成数字量的形式,然后存放在接口和总线中。处理器总线具有兼容性,所以内部的电源线不需要直接连接就可以互相工作。酷睿I3-330处理器在电路内部加入IBM System 3250 M5(5458I31)芯片,同时内置一颗英特尔至强E3-1220v3四核处理芯片,该处理器提供四核8线程的计算能力,三级缓存为20 MB,标称主频为3.3 GHz。同时,其配备8 GB DDR3 RDIMM规格的内存,提供24个内存插槽。另外,整合四口千兆网卡,内置750 W电源,拓展插槽有1个PCIe 3.0x8插槽[7]。各通道加入限幅保护机制,确保处理过程不会遭到外部袭击。
1.4 触摸屏显示器设计
触摸屏选用的是LCD,不仅能够展示出丰富的信息,同时消耗的能量较低,重量轻,不会占据过多面积。触摸屏接口包括:同步信号接口、数据线接口、像素接口。触摸屏接口设计如图3所示。

图 3 触摸屏接口设计Fig.3 Design of touch screen interface
多线接口的连接方式使触摸屏可以同时显示多目标信息,显示结果具有实时性和连续性[8]。
1.5 警报器设计
定位系统硬件部分设有警报器,在处理器得出处理结果后,中心系统会与总数据库对比,如果发现追踪到的目标出现问题,警报器就会发出报警声。警报器的跟踪模式分为半自动模式、全自动模式和手动模式,控制不同类型的问题。
2 软件设计
根据设计的室内定位系统硬件部分对软件进行编程,软件工作流程如图4所示。

图 4 定位系统软件工作流程Fig.4 Software workflow of the positioning system
室内定位系统软件工作是一个复杂的过程,共分为6步。
(1) 用采集器采集外部信息。采集过程往往要针对多目标进行,信息的采集量很大,同时存在一些干扰信号和微弱信号。采集器通过筛选系统将干扰信号剔除,利用放大器放大微弱信号,选出有用信号传递给处理器[9]。
(2) 处理追踪信息。8个处理通道同时启动工作,将接收到的采集信息按目标分类,不同目标的信息输入到不同通道中,通道与通道之间存在间隔,避免信息之间的干扰。处理后的信息分别反馈给计算机系统主机和移动终端。
(3) 中心系统分析。得到的结果不能立刻在液晶显示器中显示,要与物联网内部数据库的数据进行对比,如果出现较大偏差,则代表定位结果不准确,需要返回上一单元,重新定位;如果与数据库内部数据相差不大,则证明定位结果比较准确,可以继续下面的工作。
(4) 确定目标所处位置。由不同的定位节点确定目标所处的具体位置,定位节点位于室内多个位置,且存在相关性,能够准确锁住目标位置。
(5) 位置追踪。在确定目标位置后,由监控装置实施全方位追踪,保证锁死目标,防止目标脱离系统监管范围。
(6) 显示结果。当目标能够完全被定位系统掌握以后,物联网操作中心就可以将结果显示在LCD液晶屏上。
系统软件利用神经网络算法确定目标的三维位置。用户横坐标位置x为
x=(x1-x2-x3)+Δx=

(1)
式中:x1,x2,x3为不同节点所处的横坐标位置;Δx为节点横坐标标准差;a为横坐标系数;b为纵坐标系数;c为立体坐标系中的z轴系数;f为位置调节系数。
用户纵坐标位置y为
(2)
式中:y1,y2,y3为不同节点所处的纵坐标位置;Δy为节点纵坐标标准差。
立体坐标系中的用户z轴位置为
z=(z1-z2-z3)+Δz=

(3)
式中:z1,z2,z3为不同节点所处的z轴坐标位置;Δz为节点z轴坐标标准差。
根据用户位置x,y,z可以准确判断追踪目标所处位置,然后将结果显示到图5。
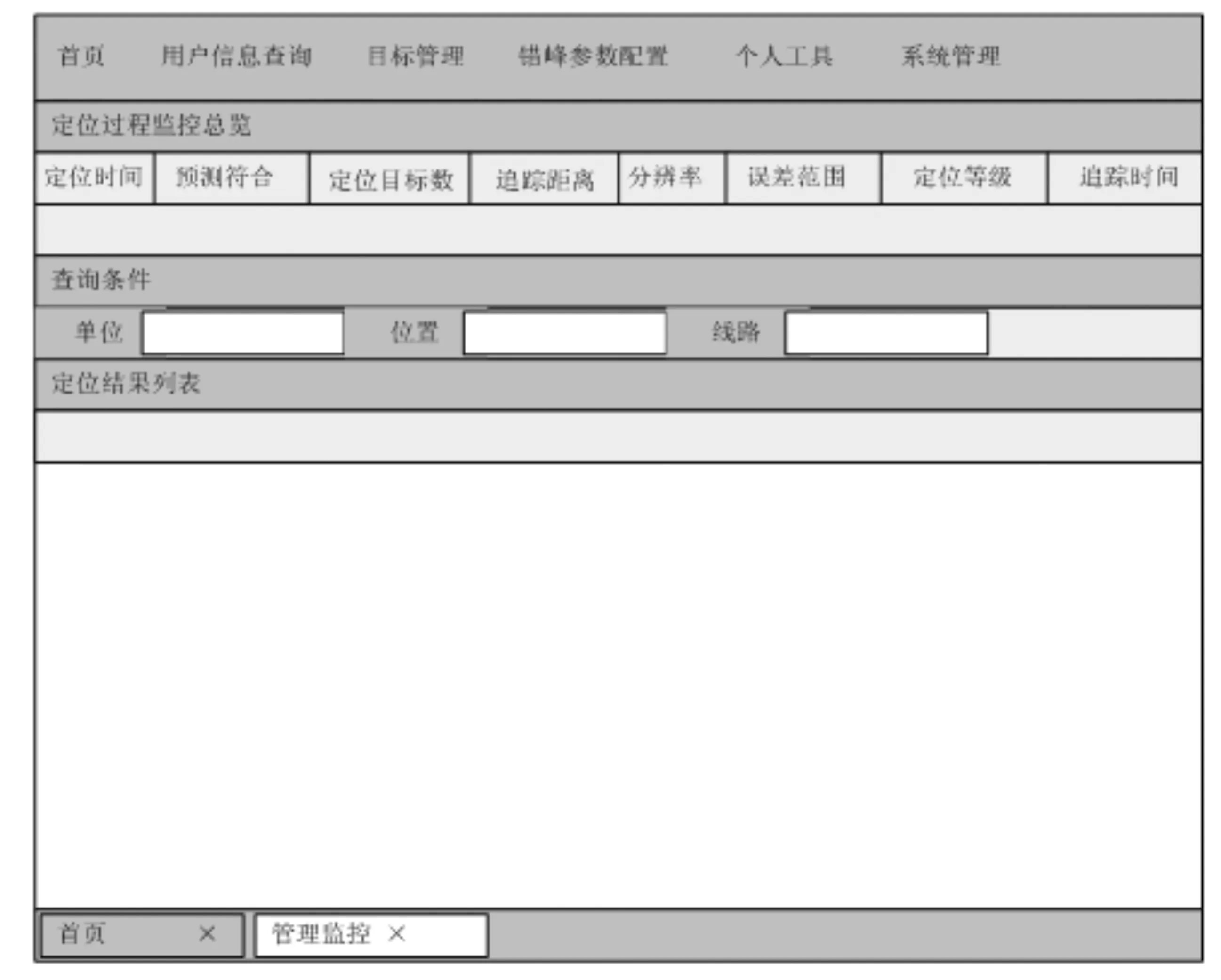
图 5 软件结果显示界面Fig.5 Display interface of the software result
图5显示的内容有:用户信息、定位系统信息、追踪目标数、追踪距离、追踪时间、定位时间、可能存在的误差范围等。定位过程要通过图形和表格的方式展现到显示界面中,以方便工作人员查询,出现问题时可以第一时间采取解决措施[10]。
3 结果与分析
为了检测区域性多目标长距离移动跟踪室内定位系统的实际工作效果,与传统定位系统进行对比实验。设定实验参数:连接网络为物联网,电源连接方式为串联/并联,处理器型号为酷睿I3-330,工作模式为DSP模式,电流为100~500 A,电压为220 V,定位时间为50 min,室内面积为150 m2
根据上述设定的参数进行实验,分别选用传统系统和本文设计的系统对室内目标进行定位,对比实验分为2组。
第1组:在定位时间相同,追踪距离不变的情况下,记录2种系统定位到的目标数,实验结果如图6所示。
第2组:在追踪目标相同,追踪时间不变的情况下,记录2种系统追踪的最远距离,实验结果如图7所示。
分析图6可知,在室内距离为150 m2的情况下,传统系统能够定位的目标要远远少于本系统。在工作50 min后,传统系统只能将10个目标定位出来,而本文设计的系统能够定位的目标高达41个,工作效率是传统系统的4倍。
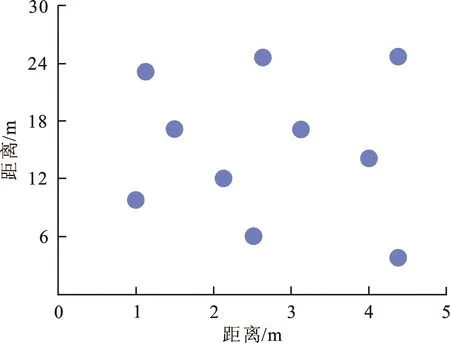
(a) 传统系统
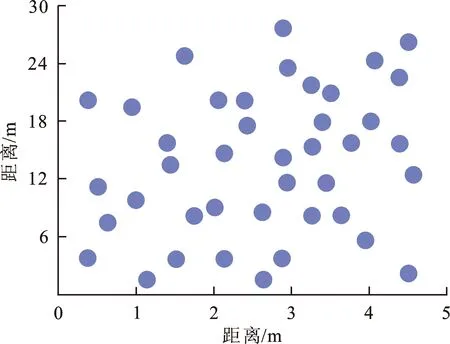
(b) 本文系统图 6 定位目标数对比结果Fig.6 Comparison results of the target number
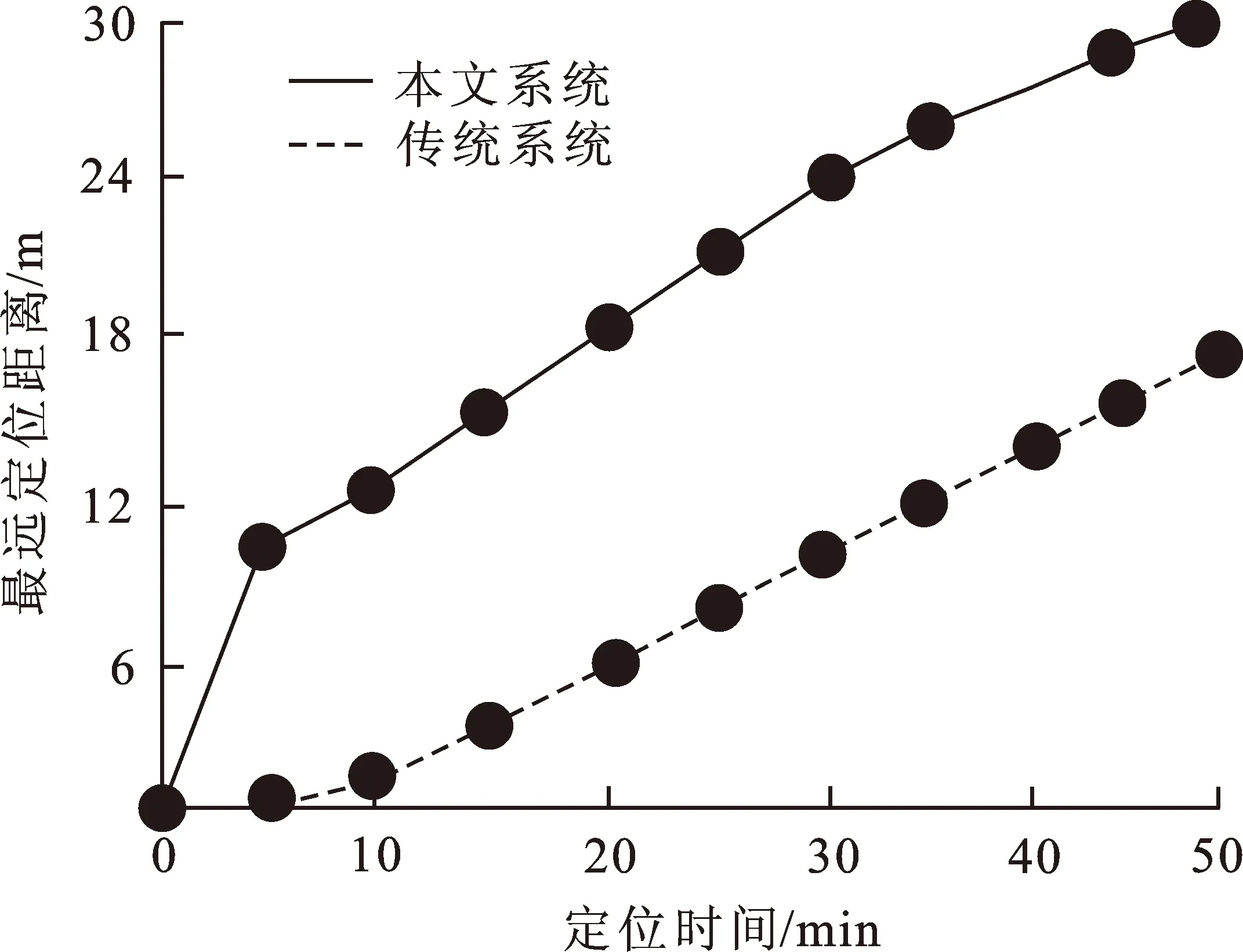
图 7 定位目标数对比结果Fig.7 Comparison results of the target numbers
由图7可知,定位时间越长,最远定位距离越大。当定位时间为10 min时,传统系统的最远定位距离约为2 m,本系统的最远定位距离约为11 m;当定位时间为30 min时,传统系统的最远定位距离约为11 m,本系统的最远定位距离约为24 m;当定位时间为50 min时,传统系统的最远定位距离约为17 m,本系统的最远定位距离几乎可以达到整个室内距离的长度。目标具有移动性,如果定位距离过短,一旦目标脱离追踪范围,再次追踪定位就会变得极其复杂,目标可能会对定位系统产生免疫,本文系统定位的范围和传统系统的定位范围相比,追踪能力很强,被锁死的目标很难脱离系统的追踪。
4 结 论
(1) 在相同的工作时间,相同的追踪范围下,本文研究的系统定位能力是传统系统定位能力的4倍,室内绝大多数目标都可以被精准地定位到。
(2) 随着工作时间的增加,最远定位距离不断增大,在50 min的工作时间内,传统距离只能定位到17 m以内的目标,本文设计的系统在30 m以内的目标都能精确地定位。
该系统定位范围十分广阔,对于一些隐藏较深的目标也能精准地确定出其所在的位置信息,具有很大的发展空间。
猜你喜欢
导航定位与授时(2020年5期)2020-09-23 03:05:00
铁道通信信号(2020年9期)2020-02-06 09:16:06
小学生导刊(2018年34期)2018-12-18 01:53:14
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
山东青年(2016年3期)2016-02-28 14:25:55
学习月刊(2015年1期)2015-07-11 01:51:12
母子健康(2015年1期)2015-02-28 11:21:33
电子设计工程(2015年12期)2015-02-27 12:06:20
汽车零部件(2014年1期)2014-09-21 11:41:11
小青蛙报(2014年1期)2014-03-21 21:29:39
